用于脚轮的致动机构的制作方法
一种技术方案描述了一种用于脚轮的致动机构,该致动机构借助凸轮机构对脚轮制动和定位,凸轮机构使用在制动杠杆或制动杆上产生的最小的力来实现脚轮的制动。所提出的技术解决方案也有助于在保健和护理设施中轻松地处理患者支承设备的脚轮,其使用由护理人员或者电子脚轮制动系统产生的最小力,如果电子脚轮制动系统用于患者支承设备的脚轮的制动。该技术方案的另一积极方面是患者支承设备上的脚轮的噪音水平的显著降低。
背景技术:
1、本文中描述的技术解决方案侧重于与床一起使用的脚轮的致动和控制,特别是医院、医疗保健和护理设施或环境中的患者支承设备。上述的床具有固定于基部框架的四个以及更多的脚轮或引导轮,脚轮或引导轮能够围绕水平轴线和竖直轴线转动以使床从一处位置移动到另一处,并配备有制动器以将脚轮固定在期望位置中并且在期望方向上移动床。
2、现有技术中已知的患者支承设备原则上具有四个标准脚轮这些脚轮可以配备有用于锁定(阻止)脚轮旋转的独立系统,该独立系统位于脚轮内部,或者在每个独立的脚轮处进行本地控制,或者具有用于一次就锁定所有脚轮的集中系统。上述用于锁定和/或旋转的系统的缺点在于,这些系统产生过大或过小的致动脚轮的锁定力和/或制动力,这对脚轮造成伤害或造成脚轮的不充分锁定和/或制动。这些类型的脚轮都面向行进方向旋转和/或围绕竖直轴线旋转和/或围绕固定轴线水平地旋转。
3、上述现有技术公开于专利us8789662b2中。在该技术方案中,所有脚轮都被制动,并且在空挡模式和释放制动器的情况下,所有脚轮都围绕竖直轴线旋转,这意味着所有脚轮都可能转向不同的侧向。然而,除了左转和右转之外,每个患者支承设备还需要面向行进方向引导,在这种情况下,这也通过由马达致动的大双重轮提供。因此,该技术方案的缺点是需要另一对脚轮来将患者支承设备引导至期望的行进方向。这在经济上要求很高,此外所需要的额外的带有致动系统以操纵和制动患者支承设备的轮子会增加患者支承设备的重量。因此,患者支承设备较重、更昂贵并且生产更复杂。
4、现有技术还公开了床或带轮子的设备,诸如手推车、婴儿车、椅子、担架等,它们具有组合的仅水平旋转的脚轮以及水平和竖直旋转的脚轮。如果患者支承设备配备有全都可以水平和竖直旋转的脚轮,那么就出现如何正确地将这种患者支承设备引导到期望的行进方向的问题。这样的患者支承设备需要具有脚轮中的至少一个脚轮作为定向脚轮,其通过使用位于该脚轮上的独立锁定机构来实现仅在行进方向上的水平旋转。锁定机构锁定(或阻止)这样的脚轮围绕脚轮的竖直轴线旋转。锁定机构可以呈独立的杠杆或固定于脚轮以锁定行进方向的控制构件的形式。这样的锁定机构使得脚轮的结构复杂化,此外,需要随时使用杠杆或控制构件来直接锁定脚轮上的行进方向。可选地,这种用于锁定行进方向的杠杆或控制构件可以集成在脚轮本身中,这是复杂并且在经济上要求高的。大多数情况下,这种集成的杠杆或控制构件比制动杆小,因此护理人员需要弯下腰到脚轮处并且手动设定杠杆,这对用户来说并不友好。有时护理人员需要施加更大的力来推动杠杆,有时甚至用脚也很难做到。
5、这种脚轮类型的另一个缺点是脚轮只有单个简单的凸轮,该凸轮仅致动(控制)一个控制脚轮制动系统的销或杠杆,并且要设定行进方向,脚轮需要配备有上述的独立锁定系统。这些脚轮的制动和定向机构的内部布置的系统相当庞大,需要通过两种力来致动,这带来了这些力的使用不当和操控性差以及故障率高的危险。此外,这种制动和方向机构的双重结构不符合用于固定脚轮的销的标准尺寸,这导致患者支承设备离地的最低安全高度增加了另外几厘米,这可能因此增加患者跌落的风险。
6、患者从任何类型的患者支承设备跌落的风险是必须解决的严重问题。在医院设施和特别是护理设施和环境中跌落表示最危险的不可预测事件,导致治疗并发症并延长患者的痛苦健康状况并且随之是延长的治疗期。由于这些原因,跌落是非常不期望的。
7、为了避免因大脚轮而导致从具有较高的下部框架位置的患者支承设备意外跌落,建议使用由于使用的脚轮高度较小而具有较低的安全位置的患者支承设备。当使用在同一申请人提交的国际专利申请pct/cz2021/000017中公开的具有带式制动器的脚轮时,可以显著降低脚轮的高度,该申请全文以参见的方式纳入本文。
8、原则上,在保健和护理设施和环境中与患者支承设备一起使用的脚轮应满足以下用于操作患者支承设备的必要要求:脚轮应独立移动,即脚轮可围绕竖直和水平轴线自由旋转;脚轮需要具有刹车,即锁定脚轮以围绕水平轴线旋转的机构。由于脚轮也可以围绕竖直轴线旋转,因此有必要使这种脚轮具有用于锁定方向的机构,即,锁定围绕竖直轴线的旋转并将脚轮引导到行进方向的机构。
9、锁定脚轮的另一种方法称为完全锁定,此时脚轮的相对于围绕竖直轴线和水平轴线的旋转被锁定。
10、脚轮的所有标准位置由中央脚轮控制系统踏板(或杠杆)致动。中央脚轮控制系统踏板或单个脚轮上的单个踏板可致动脚轮的各位置,诸如“行驶(或行进)”、“制动”和“锁定”。位置“行驶”意味着所有脚轮都是中央致动的,或者每个独立的脚轮都设定在行驶(行进)位置。位置“制动”表示借助中央脚轮控制系统踏板将大部分或所有脚轮设定到完全锁定位置。位置“锁定”意味着一个或两个脚轮由中央脚轮控制系统或单个踏板设定到方向锁定位置,并且其它脚轮呈行驶位置。
11、上述所有位置目前都是以脚轮的内部结构包括一个具有三个位置的凸轮的方式来解决的。该解决方案由腾德有限公司(tente gmbh)的美国专利第7506404b2号公开。然而,这种带有内部致动系统的脚轮具有几个不足之处。脚轮内部的一个凸轮很难就其功能,即不同的使用方式进行优化。脚轮的制动是通过摩擦来完成的,当凸轮力将制动块推入到带中并且由于弹簧力释放脚轮时,完成制动器释放。为了锁定围绕竖直轴线的旋转,使用了提升构件,但是经常一个锁定盘的齿撞击另一个盘,这导致该机构在一段时间后损坏。当使用一个凸轮时,技术上不可能设计凸轮的形状使中央脚轮控制系统踏板或脚轮踏板处于限定的位置“行驶”、“制动”和“锁定”。在标准机构中,当中央脚轮控制系统的开启状态功能不明显时,踏板始终处于在位。这种类型的脚轮的另一个缺点是,由于在机构上产生很大的力,脚轮需要由刚性金属材料设计和制造,这导致脚轮非常嘈杂。
12、在脚轮与保健和护理设施和环境中的患者支承设备一起使用的情况下,对于护理人员重要的是具有脚轮的中央致动(控制),而不是位于独立脚轮上的独立致动踏板(或杠杆)。因此,经常使用这样的系统,即,该系统具有例如三个具有三个位置(完全锁定、向前行驶、向后行驶)的脚轮和一个具有诸如完全锁定、行驶和方向锁定的三个位置的脚轮。现有技术还公开了不同的脚轮布置,其中改变了销中的一个凸轮的类型而其它机构保持不变。
技术实现思路
1、现有已知脚轮致动技术方案的上述主要不足通过所提出的用于脚轮的致动机构的技术方案来解决,该技术方案包括制动机构和方向机构以在行进方向上锁定脚轮并锁定脚轮围绕竖直轴线的旋转,其中,这两个机构都是用于固定脚轮的标准销的一部分。该系统简化了脚轮结构并降低了脚轮的总高度,由此也降低了患者支承设备的最低可能安全高度。所提出的解决方案能够在施加最小的力来致动脚轮的情况下使用制动机构和方向机构。由于使用最小的致动力,脚轮的噪音水平也降低了,因为独立的部件和构件可以由塑料材料制成。
2、所提出的技术解决方案还消除了与脚轮的致动踏板或中央脚轮踏板在患者支承设备的底盘上的位置相关联的不足。所提出的解决方案优化了致动踏板的位置,使得该踏板所在的位置完全明确,即,在“行驶”、“制动”或“锁定”位置。
3、所提出的技术方案公开了一种患者支承设备,包括患者表面平台、上部框架、提升机构、底部框架、通过销固定于底部框架的多个脚轮以及固定于脚轮的销的致动踏板。致动踏板致动脚轮的位置,诸如制动位置、空挡模式和方向行驶位置。每个脚轮包括具有多个开关机构的凸轮机构,开关机构用于致动和改变脚轮的独立位置。
4、现有已知标准制动和方向机构的上述基本不足通过本文公开的用于脚轮的致动机构来解决。脚轮主要与保健和护理设施和环境中的患者支承设备一起使用。可选地,这种脚轮可以与需要从a点移动到b点的任何类型的家具一起使用。所提出的用于脚轮的致动机构会致动脚轮的多个位置,并且还可以与包括带式制动器的脚轮一起使用,包括带式制动器的脚轮如在同一申请人提交的国际专利申请pct/cz2021/000017中公开的,该申请全文以参见的方式纳入本文。所提出的用于脚轮的致动机构优选地设计成用于具有内部制动齿或棘爪(棘轮)的脚轮。
5、所提出的用于具有内部制动齿的脚轮的致动机构包括其中定位脚轮的内部致动机构的销、轴承、用作脚轮的承载构件(例如叉部)的覆盖件。使脚轮围绕销自由旋转的轴承定位在销和承载构件之间。在另一实施例中,具有带式制动器的脚轮可固定至承载构件,如同一申请人提交的国际专利申请pct/cz2021/000017中所公开的,该申请全文以参见的方式纳入本文。
6、脚轮销包括整个内部致动机构,如上所述,其包括致动脚轮的致动踏板的位置的凸轮机构(脚轮的移动、脚轮制动和脚轮的方向,即围绕脚轮的竖直轴线的旋转),销还包括多个互锁提升构件、多个锁定杠杆,优选地三个锁定杠杆、接合弹簧的多个棘爪(棘轮)、优选地四个弹簧,其中每个锁定杠杆具有自己的弹簧。
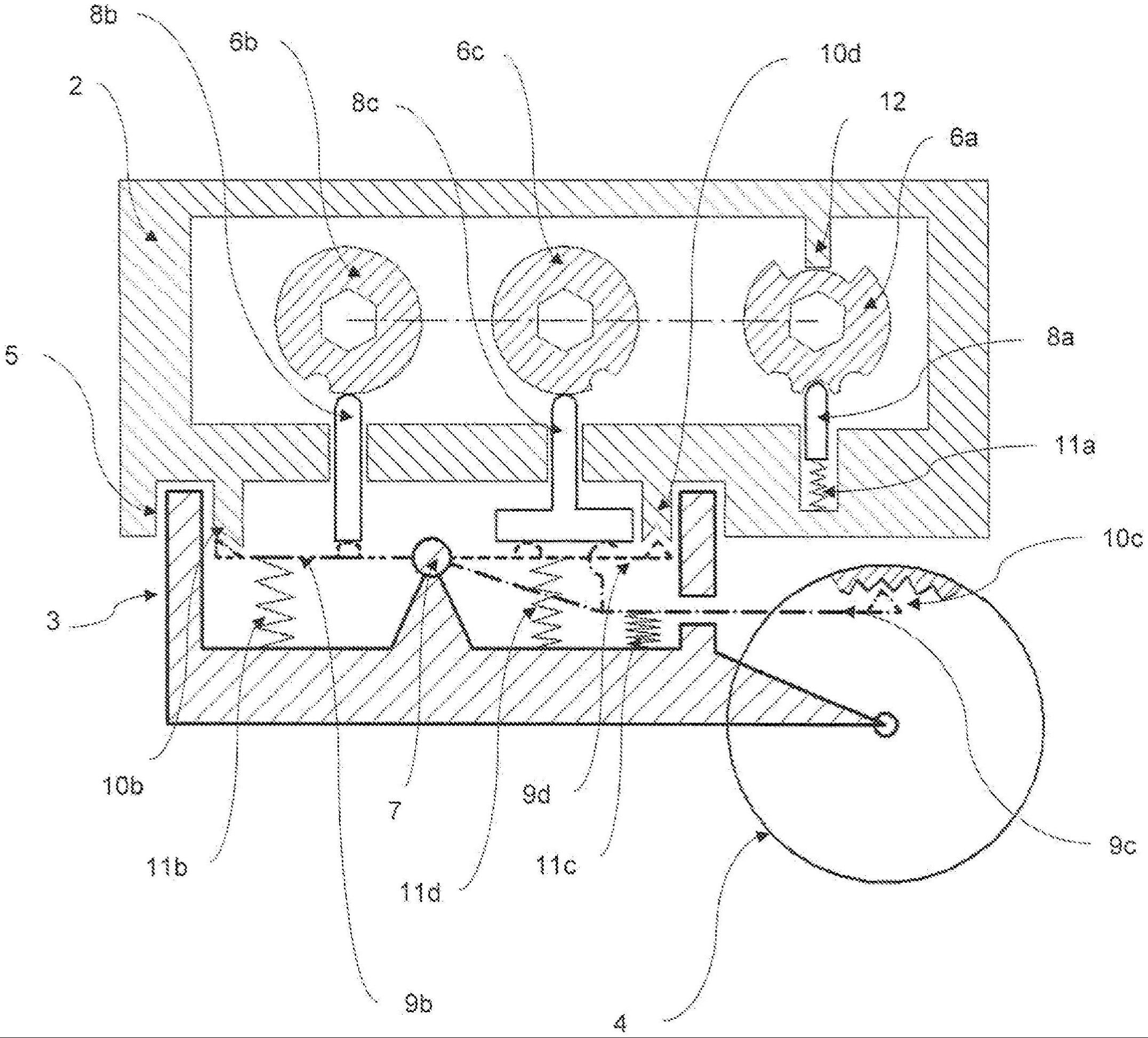
7、在优选实施例中,致动脚轮的独立位置的凸轮机构如下文公开地来设计和构造。整个凸轮机构位于脚轮销内部。凸轮机构包括多个凸轮,优选地如下三种类型的凸轮:凸轮a是用于脚轮的致动踏板的位置的凸轮,即该凸轮将致动踏板保持在上文限定的三个位置中;凸轮b是用于脚轮的方向的凸轮,即该凸轮接合或释放方向锁定;以及凸轮c,它是用于制动脚轮并且与此同时作为脚轮的竖直制动器的凸轮,即该凸轮制动脚轮。脚轮销还包括与凸轮a、b和c接触的多个互锁提升构件。根据凸轮的类型,每个凸轮与一个提升构件接触。第一凸轮a(用于脚轮的致动踏板的位置的凸轮)与致动踏板的位置的提升构件接触,弹簧位于致动踏板下方。凸轮a借助承靠在凸轮a上的致动踏板的逆止部来致动脚轮的致动踏板的位置。第二凸轮b(用于脚轮的方向的凸轮)与脚轮的方向的提升构件、脚轮的方向的锁定杠杆、脚轮的方向的棘爪、以及脚轮的方向的弹簧接触,该弹簧定位在承载构件和脚轮的方向的锁定杠杆之间。第三个凸轮c(用于制动脚轮并且与此同时是脚轮的竖直制动器的凸轮)与制动器的提升构件接触,它致动脚轮的制动器的锁定杠杆以及脚轮的竖直制动器的锁定杠杆。脚轮的这两个锁定杠杆都接合脚轮的制动器的棘爪和脚轮的竖直制动器的棘爪,并且由脚轮的制动器的弹簧和脚轮的竖直制动器的弹簧限制/限定。脚轮的制动器的弹簧和脚轮的竖直制动器的弹簧也致动脚轮的制动器的锁定杠杆和脚轮的竖直制动器的锁定杠杆。
8、当生产根据提出的解决方案的脚轮时,每个脚轮总是配备有相同的凸轮,在该优选实施例中是三个凸轮。然而,本领域技术人员可以组装具有两个凸轮或更多个结构不同的凸轮的凸轮机构,这种凸轮机构将能够借助提升构件、锁定杠杆和棘爪致动脚轮。
9、在另一实施例中,所提出的凸轮机构也可与具有带式制动器的脚轮一起使用,具有带式制动器的脚轮如在同一申请人提交的国际专利申请pct/cz2021/000017中公开的,该申请全文以参见的方式纳入本文。使用这种类型的脚轮能够在保持脚轮的标准尺寸时将患者支承设备的高度降低到尽可能低的安全位置,并且能够致动脚轮的其它运动,带式制动器无法实现这些运动,例如围绕竖直旋转轴线的移动。
10、在该另一实施例中,双向带式制动脚轮包括脚轮制动机构,该制动机构部分位于脚轮销的内空间的内部,部分位于脚轮的内空间的内部,制动机构固定在承载构件的侧向边缘上,脚轮的双向带式制动系统附连于该侧向边缘。脚轮销还包括竖直轴线枢轴,该枢轴使脚轮围绕脚轮的竖直轴线旋转。承载构件固定于竖直轴线枢轴。叉部包括轭部之引导杆和位于轭部之引导杆下方的弹簧之支承部。弹簧支承部的杠杆至少在一个点位中与轭部配合,并且弹簧支承部的这个杠杆在一个点位中固定于承载构件并且与脚轮的控制构件接触。可选地,在另一实施例中,在承载构件上方的销内部,由凸轮机构致动的杠杆与轭部配合,其中用于脚轮围绕销移动的轴承位于销和承载构件之间,使得具有带式制动器的脚轮可以具有标准脚轮和引导脚轮的功能。在优选实施例中,轭部是具有若干锚定点的一个单元,在另一实施例中,轭部包括用于固定轭部的至少两个臂以及用于固定制动带的至少两个臂。轭部的每个臂包括至少一个锚定点,优选地在形状为t形的每个臂处存在两个锚定点,或从轭部的臂突出到每一侧以形成对的突起。
11、轭部位置的变化对双向带式制动器的制动有显著影响。当释放轭部上的杠杆时,制动带借助于弹簧收缩围绕制动鼓。在第一阶段期间,弹簧没有形成足够的力来制动脚轮的制动鼓。当释放杠杆到轭部时,轭部根据脚轮的旋转方向倾斜并且承靠到轭部的引导杆中,并且因此根据杠杆比开始产生力,从而使制动带收缩围绕制动鼓,并且脚轮制动。由于轭部的对称性,可以改变轭部的位置。通过改变轭部的方向到另一侧,在相反的方向行驶期间也可以制动脚轮。在把杠杆压到轭部上的情况下,锚定点更接近脚轮中心,并且制动鼓周围的制动带会释放,这能够使脚轮解除制动(释放),该脚轮随后可以沿两个旋转方向自由移动。
12、由于这个提出的解决方案,关于凸轮机构,不需要改变销中的凸轮机构。如果脚轮的功能需要改变,改变锁定杠杆和棘爪(或棘轮)的数量就足够了。改变脚轮销下方的锁定杠杆和棘爪的数量,其中,销内部的凸轮机构保持不变,导致生产成本降低和生产时间加快。目前,标准脚轮配备有不同的销和不同的凸轮,这使得生产成本高,因为生产了许多不同的销,每个销具有针对脚轮的不同功能的不同的凸轮机构。
13、如上所述,该解决方案的另一个优点是由于施加在致动脚轮或中央脚轮控制系统上的力减小,脚轮的行驶更安静,并且它还能够使用诸如最小功率的伺服马达(伺服驱动器)之类的电动马达和其它具有最低电压的电动马达以电子方式致动脚轮,以优化马达输出。
- 还没有人留言评论。精彩留言会获得点赞!