一种针对复杂路况的自动驾驶汽车的行驶速度优化方法
1.本发明涉及车辆领域。特别涉及一种针对复杂路况的自动驾驶汽车侧向饱和约束下的行驶速度优化的方法。
背景技术:
2.合理的行车速度规划是成功实现自动驾驶的前提,一直以来,大曲率转弯和低附着系数路面是速度规划的难题。与此紧密相关的车辆辅助驾驶系统是介入自动驾驶系统的过渡阶段,当车辆辅助驾驶系统开始工作时车辆已发生失稳或有失稳倾向,缺少对于车辆行驶时的稳定边界的讨论。
3.在大曲率弯道和低附着系数路面上行驶时,由于提供给车辆转弯的轮胎侧向力的执行空间有限,不合理的行车速度极易导致车辆发生失稳。因此,找到在相应路况下车辆轮胎侧向力和行车速度的解析关系,获得一个能够使车辆稳定行驶的状态边界尤其是纵向速度的边界值是至关重要的,这样既可以保证车辆稳定又可以尽量提高行车效率。
技术实现要素:
4.本发明的目的是当汽车在大曲率弯道和低附着系数路面上行驶时,能实时确定当前的最优行车速度,车辆按此速度行驶,既可以保证行驶过程平稳安全又可以提高行车效率。
5.一种针对复杂路况的自动驾驶汽车的行驶速度优化方法,包含以下步骤
6.步骤一:根据车辆三自由度动力学模型和轮胎魔术公式,结合车辆自身参数,包括整车质量和前后轴距,得到车辆在转弯时的运动学关系和基于最大可执行前轮侧向力的速度-曲率半径约束关系。
7.步骤二:根据gps和车载传感器得到车辆前方预瞄距离内路径的曲率半径序列[ρ1,ρ2,
…
,ρn]、路面附着系数μ和纵向加速度a
x
,计算得到最小曲率半径ρ
min
,判断车辆此时的弯道行驶状态。
[0008]
步骤三:根据步骤二中判断的弯道行驶状态,求解最大可执行前轮侧向力f
yf max
;
[0009]
1)当判断为入弯状态时,对前轮侧偏刚度采用最大线性侧偏角割线进行修正,得到前轮侧偏割线刚度根据纯侧偏工况下轮胎侧向力与路面附着系数的关系,结合侧偏割线刚度,得到在入弯状态下的最大可执行前轮侧向力
[0010]
2)当判断为出弯状态时,估计前轮纵向力通过轮胎摩擦圆得到在出弯状态下的最大可执行前轮侧向力
[0011]
步骤四:将步骤三求解的最大可执行前轮侧向力f
yf max
带入步骤一中的速度-曲率半径约束关系,结合步骤二计算得到的ρ
min
并与运动学关系联合求解得到优化行驶速度。
[0012]
所述步骤一中
[0013]
(1)车辆三自由度动力学模型为
[0014][0015][0016][0017]
式中,f
xf
为前轮纵向力,f
yf
为前轮侧向力,f
xr
为后轮纵向力,f
yr
为后轮侧向力。δ为前轮转角,m为汽车质量,v
x
为车身坐标系下汽车的纵向速度,vy为车身坐标系下汽车的横向速度,为大地坐标系下车身的横摆角,为汽车横摆角速度,为汽车横摆角加速度,lf为车辆质心到前轴的距离,lr为车辆质心到后轴的距离,iz为汽车的转动惯量。
[0018]
(2)魔术轮胎公式为
[0019]fy
=fy(α)=dsin{carctan[bα-e(bα-arctan(bα))]}
ꢀꢀꢀꢀ
(4)
[0020]
其中,输入量α为侧偏角,输出量fy为轮胎侧向力。d为峰值因子,为输出量fy的峰值,c为形状因子,能够影响所得曲线的形状,b为刚度因子,曲率因子e用来控制曲线峰值处的曲率,b、c、d和e均与具体的轮胎型号有关。
[0021]
(3)轮胎的侧偏刚度为
[0022][0023]
(4)车辆在转弯时的运动学关系为
[0024][0025]
其中,kf和kr分别为前轮和后轮的侧偏刚度,ρ为汽车转弯时的曲率半径。
[0026]
(5)基于最大可执行前轮侧向力的速度-曲率半径约束关系为
[0027][0028]
其中,af为前轮轮胎侧偏角。
[0029]
所述步骤二中判断车辆弯道行驶状态如下
[0030][0031]
其中,ρ
min
为车辆行驶方向上一定距离内的最小曲率半径,ρ1为在车辆行驶方向上距离车头最近的观测点的曲率半径。
[0032]
所述步骤三中
[0033]
(1)前轮侧偏割线刚度为
[0034][0035]
其中,α
fmax
为前轮侧向力在纯侧偏工况下处于线性区内的最大侧偏角。
[0036]
(2)轮胎侧向力与路面附着系数的关系为
[0037][0038][0039]
其中,为附着系数为μ时的轮胎侧向力,为附着系数为μ时的最大线性区侧偏角,μ0=1和α0=5
°
分别为参考路面附着系数和参考侧偏角。
[0040]
(3)在入弯状态下的最大可执行前轮侧向力为
[0041][0042]
(4)对于前驱车辆,估计前轮纵向力为
[0043][0044]
(5)出弯状态下的最大可执行前轮侧向力为
[0045][0046][0047]
其中,f
zf
为前轮垂直载荷。
[0048]
有益效果
[0049]
本发明给出了一种在复杂路况下的自动驾驶汽车规划速度量化指导准则,在保证车辆侧向稳定的前提下尽可能地提高行车效率。
附图说明
[0050]
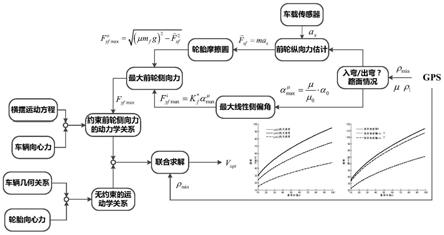
图1为本发明所提出的复杂路况行车速度优化系统原理图;
[0051]
图2为本发明所采用的三自由度车辆模型图;
[0052]
图3为本发明所提出的侧偏刚度校正示意图;
[0053]
图4为本发明所采用的轮胎侧向力与路面附着系数关系示意图;
[0054]
图5为本发明所提出的出弯状态下的最大可执行前轮侧向力示意图;
[0055]
图6为本发明所提出的三种不同附着系数路面入弯状态下的优化速度;
[0056]
图7为本发明所提出的三种不同纵向加速度出弯状态下的优化速度;
[0057]
图8为本发明用于验证的参考轨迹;
[0058]
图9为在三种附着系数路面上进行轨迹跟踪的横向偏差;
[0059]
图10为在三种附着系数路面上进行轨迹跟踪的车辆速度;
[0060]
图11为在三种附着系数路面上进行轨迹跟踪的前轮侧偏角。
具体实施方式
[0061]
下面结合附图对提出的复杂路况下的速度优化方法进一步地阐述和说明。
[0062]
如图1所示,本发明提出一种针对复杂路况的自动驾驶汽车的行驶速度优化方法,包括以下步骤:
[0063]
步骤一、建立如图2所示的车辆自行车模型车辆模型和轮胎模型,根据侧向力曲线在原点的微分求取侧偏刚度,通过推导得到车辆在转弯时的运动学关系和基于最大可执行前轮侧向力的速度-曲率半径约束关系。
[0064]
步骤二、根据gps得到车辆前方一定预瞄距离内行驶路径的曲率半径序列[ρ1,ρ2,
…
,ρn]和路面附着系数μ,通过车载传感器得到纵向加速度a
x
,计算得到最小曲率半径ρ
min
,判断车辆此时的弯道行驶状态。
[0065]
步骤三、如图3所示,由于采用侧偏刚度对轮胎力线性化得到的结果在原点附近较为准确,而随着侧偏角的增大其误差也会增加,对前轮侧偏刚度采用最大线性侧偏角割线进行修正,得到前轮侧偏割线刚度
[0066]
步骤四、如图4所示为纯侧偏工况下轮胎侧向力与路面附着系数的关系,结合步骤三中的侧偏割线刚度,得到在入弯状态下的最大可执行前轮侧向力
[0067]
步骤五、估计前轮纵向力通过如图5所示的轮胎摩擦圆得到在出弯状态下的最大可执行前轮侧向力
[0068]
步骤六、根据步骤二中所判断弯道行驶状态,分别对应将式(12)或式(14)所描述的前轮最大可执行侧向力带入并替换式(7)中的前轮最大可执行侧向力,最后将式(6)和式(7)联合并结合步骤二中依据式(8)计算得到的ρ
min
求解即可得到当前车辆最优行驶速度,图6所示为三种不同附着系数路面入弯状态下的不同曲率半径对应的优化速度,图7所示以三种不同加速度出弯时不同曲率半径对应的优化速度。
[0069]
下面给出本发明所提供的技术方案的仿真实验数据。
[0070]
本实验仿真环境为使用carsim和simulink软件搭建的联合仿真平台,设计轨迹跟踪控制器模拟自动驾驶场景,验证所提出的优化速度的准确性。
[0071]
图10所示为仿真车辆以优化速度为参考在不同附着系数路面上进行轨迹跟踪的车速,可以看到在纵向位移x=80、200和350m处车辆均主动调速为进入弯道做准备。图9所示为轨迹跟踪的横向偏差,图11所示为车辆在轨迹跟踪时的前轮侧偏角,可见按本发明提出的优化速度行驶可以保证车辆的横向稳定与轨迹跟踪效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1