机电式制动系统及其控制方法与流程
1.本发明涉及能够实时向驾驶者通知制动垫片的磨损状态的机电式制动系统及其控制方法。
背景技术:
2.车辆上必然会安装有用于执行制动的制动系统,为了驾驶者及乘客的安全,提出了各种方式的制动系统。
3.在以往的制动系统的情况下,主要利用了当驾驶者踩下制动踏板时,利用机械地连接的助力器而向轮缸供给制动中所需的液压的方式。但是,最近作为下一代制动系统,研发出了以电信号接收驾驶者的制动意志,并基于此而驱动马达这样的电动装置来提供车辆的制动力的机电式制动系统。
4.这样的机电式制动系统通过马达和减速器等而将马达的旋转力转换成线性运动而提供制动盘的夹紧力,由此执行车辆的行车制动及停车制动。
5.但是,在以往的机电式制动系统的情况下,通过反复的制动动作和制动解除动作而逐渐产生制动垫片的磨损。
6.由此,在以往的机电式制动系统的情况下,无法确认制动垫片的磨损状态,即便制动垫片发生磨损,也未能认识到这一点,因此在进行制动时存在事故的危险。
技术实现要素:
7.发明要解决的课题
8.一个方面提供一种能够向驾驶者实时通知制动垫片的磨损状态的机电式制动系统及其控制方法。
9.用于解决课题的手段
10.根据公开的发明的一个方面,提供一种机电式制动系统,其包括通过马达而进行动作的机电式制动器的致动器,该机电式制动系统包括:马达驱动部,其驱动上述马达;及控制部,其与上述马达驱动部电连接,在上述机电式制动器为制动动作(apply)模式时,上述控制部算出通过上述马达的驱动而旋转的主轴(spindle)的第一旋转角度,在上述机电式制动器为制动动作解除(release)模式时,上述控制部算出上述主轴的第二旋转角度,在上述算出的第一旋转角度与上述算出的第二旋转角度之间存在差异时,上述控制部控制通知装置,以通知制动垫片的磨损状态。
11.上述控制部接收在上述制动动作模式时通过马达位置传感器而获得的马达的第一旋转角度信息,并基于上述接收的马达的第一旋转角度信息而算出上述主轴的第一旋转角度,上述控制部接收在上述制动动作解除模式时通过上述马达位置传感器而获得的马达的第二旋转角度信息,并基于上述接收的马达的第二旋转角度信息而算出上述主轴的第二旋转角度。
12.上述制动动作模式包括用于执行上述机电式制动器的制动动作的模式和用于执
行上述机电式制动器的针对制动垫片磨损的补偿制动动作的模式中的至少一个模式。
13.上述制动动作解除模式包括用于执行上述机电式制动器的制动解除动作的模式和用于执行上述机电式制动器的针对拖滞现象的补偿制动解除动作的模式中的至少一个模式。
14.上述控制部控制上述通知装置,以通知与前轮机电式制动器和后轮机电式制动器中的相应机电式制动器有关的制动垫片的磨损状态。
15.上述通知装置为位于驾驶座与副驾驶座之间的仪表中央盒(center fascia)。
16.在上述算出的第一旋转角度与上述算出的第二旋转角度之间存在差异时,上述控制部进一步算出与旋转角度的差异值对应的活塞的调整冲程值,为了与上述算出的活塞的调整冲程值对应地使上述活塞的相对位置前进,上述控制部进一步控制上述马达驱动部,以使上述马达进行旋转。
17.根据公开的发明的另一个方面,提供一种机电式制动系统的控制方法,该机电式制动系统包括通过马达而进行动作的机电式制动器的致动器,该机电式制动系统的控制方法包括如下步骤:在上述机电式制动器为制动动作模式时,算出通过上述马达的驱动而旋转的主轴的第一旋转角度,在上述机电式制动器为制动动作解除模式时,算出上述主轴的第二旋转角度,在上述算出的第一旋转角度与上述算出的第二旋转角度之间存在差异时,通知制动垫片的磨损状态。
18.在算出上述主轴的第一旋转角度的步骤中,接收在上述制动动作模式时通过马达位置传感器而获得的马达的第一旋转角度信息,并基于上述接收的马达的第一旋转角度信息而算出上述主轴的第一旋转角度。
19.在算出上述主轴的第二旋转角度的步骤中,接收在上述制动动作解除模式时通过马达位置传感器而获得的马达的第二旋转角度信息,并基于上述接收的马达的第二旋转角度信息而算出上述主轴的第二旋转角度。
20.在通知上述制动垫片的磨损状态的步骤中,通知与前轮机电式制动器和后轮机电式制动器中的相应机电式制动器有关的制动垫片的磨损状态。
21.还包括如下步骤:在上述算出的第一旋转角度与上述算出的第二旋转角度之间存在差异时,进一步算出与旋转角度的差异值对应的活塞的调整冲程值,为了与上述算出的活塞的调整冲程值对应地使上述活塞的相对位置前进,使上述马达旋转。
22.发明效果
23.根据公开的发明的一个方面,能够向驾驶者实时通知制动垫片的磨损状态。
附图说明
24.图1表示包括在一个实施例的机电式制动系统中的机电式制动器的结构。
25.图2是在包括在一个实施例的机电式制动系统中的机电式制动器中将主要部放大而以截面进行图示的图。
26.图3是在包括在一个实施例的机电式制动系统中的机电式制动器中将主要部分解而图示的图。
27.图4表示包括在一个实施例的机电式制动系统中的机电式制动器的制动动作。
28.图5表示包括在一个实施例的机电式制动系统中的机电式制动器的制动解除动
作。
29.图6表示包括在一个实施例的机电式制动系统中的机电式制动器的针对制动垫片磨损的补偿制动动作。
30.图7表示包括在一个实施例的机电式制动系统中的机电式制动器的针对拖滞现象的补偿制动解除动作。
31.图8表示一个实施例的机电式制动系统的结构。
32.图9表示在一个实施例的机电式制动系统中算出与主轴的旋转角度的差异值对应的活塞的调整冲程值的情况。
33.图10表示在一个实施例的机电式制动系统中算出根据主轴的旋转角度的差异值而所需的活塞的调整冲程值的过程。
34.图11表示一个实施例的机电式制动系统的控制方法。
35.图12表示在应用一个实施例的机电式制动系统的车辆中设置仪表中央盒的情况。
36.图13表示在应用一个实施例的机电式制动系统的车辆的仪表中央盒中通过显示器面板而通知关于前轮左侧机电式制动器的制动垫片的磨损状态的情况。
具体实施方式
37.在整个说明书中,相同的符号表示相同的构成要件。在本说明书中并非对实施例的所有要件进行说明,对公开的发明所属的技术领域的一般的内容或实施例之间重复的内容进行省略。说明书中使用的
‘
部、模块、部件、块’这样的用语可实现为软件或硬件,根据实施例,多个
‘
部、模块、部件、块’可由一个构成要件来实现或一个
‘
部、模块、部件、块’包括多个构成要件。
38.在整个说明书中,在提及某个部分与其他部分“连接”时,这不仅包括直接连接的情况,而且还包括间接连接的情况,间接连接包括通过无线通信网而连接的情况。
39.另外,在提及某个部分“包括”某个构成要件时,在没有特别相反的记载的情况下,并非排除其他构成要件,而是还可包括其他构成要件。
40.在整个说明书中,在提及某一个部件位于其他部件“上”时,不仅包括某个部件与其他部件相接的情况,而且还包括在两个部件之间存在又一个部件的情况。
41.第一、第二等用语用于将一个构成要件与其他构成要件区别开,上述的用语对构成要件不具有限定作用。在文中未明确排除的情况下,单数的表述包括多数的情况。
42.在各个步骤中,识别号码是为了便于说明而使用的,识别号码并非对各个步骤的顺序进行说明,在文中未明确特定顺序的情况下,可以与记载的顺序不同的顺序来实施各个步骤。
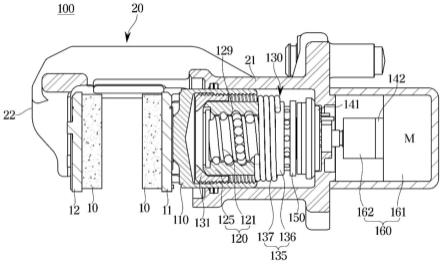
43.图1表示包括在一个实施例的机电式制动系统中的机电式制动器的结构。
44.参照图1,本实施例的机电式制动器100包括:载体(未图示),其设有一对垫板11、12,以对与车辆的车轮一起旋转的制动盘(未图示)加压;卡钳外壳20,其能够滑动地设置于载体而使一对垫板11、12进行动作;活塞110,其以能够前进的方式设置于卡钳外壳20的内部;致动器160,其产生并提供使活塞110移动的驱动力;动力转换单元120,其接收从致动器160提供的旋转驱动力而转换为线性运动并传递到活塞110来实现活塞110的轴方向前进移动;位置调整部130,其调整相对于动力转换单元120的活塞110的相对位置而补偿制动垫片
10的磨损或降低拖滞(drag)现象;及感测部140,其测量制动盘(未图示)与制动垫片10之间的紧贴力或制动垫片10的夹紧力,一对垫板11、12在内面分别附着有制动垫片10。一对垫板11、12由与活塞110相接而配置的内侧垫板11和以与后述的卡钳外壳20的爪部22相接的方式配置的外侧垫板12构成并能够滑动地设于载体。
45.卡钳外壳20包括用于使外侧垫板12进行动作的爪部22和设有活塞110的缸体部21,并能够滑动地紧固到载体。卡钳外壳20在车辆进行制动时通过由活塞110的移动产生的反作用力而从载体滑动并移动到制动盘(未图示)侧,由此外侧垫板12通过爪部22而靠近制动盘(未图示)侧来对制动盘(未图示)加压。
46.图2是在包括在一个实施例的机电式制动系统中的机电式制动器中将主要部放大而以截面图示的图。图3是在包括在一个实施例的机电式制动系统中的机电式制动器中将主要部分解而图示的图。
47.参照图1至图3,活塞110为后侧被开放的杯子(cup)形状,以能够滑动的方式插入于缸体部21的内部。另外,活塞110通过后述的致动器160及动力转换单元120而接收动力来将内侧垫板11压向制动盘(未图示)侧,在活塞110的内周面形成有与形成于后述的调整螺钉131的外周面的第一螺纹132啮合的第二螺纹133。动力转换单元120包括:主轴121,其从致动器160接收驱动力而进行旋转;螺母125,其配置于活塞110的内部,与主轴121螺纹连接而通过主轴121的第一方向旋转而与活塞110一起前进或通过主轴121的第二方向旋转而与活塞110一起后退;及多个球体129,其介于主轴121与螺母125之间。这样的动力转换单元120由将主轴121的旋转运动转换成线性运动的滚珠丝杠类型的转换装置构成。
48.下面说明的主轴121的第一方向旋转是指通过主轴121的旋转而使螺母125前进的旋转方向,主轴121的第二方向旋转是与第一方向相反方向的旋转,是指通过主轴121的旋转而使螺母125后退的旋转方向。
49.主轴121可以被划分为:在外周面形成有外部螺纹122的一侧的第一端部121a;与致动器160连接而接收驱动力的另一侧的第二端部121c;以及中央部121b,该中央部121b配置于第一端部121a与第二端部121c之间而用于固定后述的凸缘136。主轴121的第一端部121a插入到螺母125的内侧,在第二端部121c配置有实现后述的凸缘136的顺利的旋转的轴承150和感测施加到主轴121的负荷而测量制动盘(未图示)与制动垫片10之间的紧固力的感测部140。
50.螺母125形成为中空的圆筒形状,以向内侧插入主轴121的第一端部121a,在内周面形成有以球体129为媒介与主轴121的外部螺纹122啮合的内部螺纹126。另外,后述的调整螺钉131包围螺母125的外周面的至少一部分而形成在螺母125的外侧,在螺母125的外周面形成有至少一部分形成为平面的旋转防止面125a,以防止与调整螺钉131之间的相对旋转。滚珠丝杠类型的动力转换装置为已被广泛应用的公知的技术,因此省略对此的详细说明。
51.致动器160包括具备马达161和多个减速齿轮的减速装置162而构成,从配置于车辆的电源装置接收电源而产生驱动力。致动器160与主轴121的第二端部121c连接而将所产生的驱动力传递成主轴121的旋转运动。致动器160设置于卡钳外壳20的外侧,作为减速装置162可以应用行星齿轮组件或蜗杆结构等各种结构的装置,将马达161的动力减速来提供到主轴121。马达161使主轴121旋转而使螺母125进行进退移动,由此对活塞110加压或解除
加压。减速装置162设置于马达161的输出轴与主轴121之间。
52.位置调整部130调整相对于动力转换单元120的活塞110的相对位置,从而使活塞110的相对位置前进,以补偿制动垫片10的磨损,或使活塞110的相对位置后退,以减少拖滞(drag)现象。
53.位置调整部130包括:调整螺钉131,其设于螺母125的外侧而与螺母125一起进行旋转;第一螺纹132,其形成于调整螺钉131的外周面;第二螺纹133,其形成于活塞110的内周面而与第一螺纹132啮合;及调节器(adjuster)135,其设于主轴121与螺母125之间而根据主轴121的旋转量来进行压缩或膨胀,从而使螺母125及调整螺钉131向第一方向旋转来使活塞110的相对位置前进或使螺母125及调整螺钉131向第一方向的相反方向即第二方向旋转来使活塞110的相对位置后退。
54.下面说明的螺母125或调整螺钉131的第一方向旋转是与上述说明的主轴121的第一方向旋转相同的旋转方向,是指通过调整螺钉131的旋转而使活塞110前进的旋转方向。另外,螺母125或调整螺钉131的第二方向旋转作为与第一方向相反方向的旋转,是与上述说明的主轴121的第二方向旋转相同的旋转方向,是指通过调整螺钉131的旋转而使活塞110后退的旋转方向。
55.调整螺钉131以包围螺母125的前方侧部分的方式设置,在外周面形成有第一螺纹132而构成。调整螺钉131与螺母125一起旋转,并且形成与螺母125相接的内周面的至少一部分形成为平面的旋转防止面131a,以防止相对旋转。调整螺钉131在通过后述的调节器135而旋转螺母125时,与螺母125一起旋转而将螺母125的旋转力传递到活塞110侧。调整螺钉131介于螺母125与活塞110之间而形成,从而由调整螺钉131吸收当螺母125和活塞110接触时产生的负荷,由此能够防止被施加大负荷的螺母125及活塞110等部件要素的变形及磨损。
56.第一螺纹132形成于调整螺钉131的外周面,第二螺纹133形成于活塞110的内周面,第一螺纹132和第二螺纹133彼此啮合而构成。这样与螺母125一起旋转及进行线性运动的调整螺钉131和活塞110彼此螺纹结合,由此螺母125和调整螺钉131及活塞110一起进行线性运动,从而在进行一般的车辆的制动时,螺母125和调整螺钉131及活塞110一起进行前进或在解除车辆的制动时使螺母125和调整螺钉131及活塞110一起进行后退。与此同时,随着活塞110和调整螺钉131可进行彼此相对的旋转,通过螺母125及调整螺钉131的第一方向旋转而使活塞110相对于螺母125或主轴121而相对前进,使螺母125及调整螺钉131向相反方向即第二方向旋转,从而使活塞110相对于螺母125或主轴121而相对后退。
57.调节器135使螺母125及调整螺钉131旋转来使相对于螺母125或主轴121的活塞110的相对位置前进或后退。调节器135包括:凸缘136,其固定于主轴121的中央部121b,在半径方向上扩展而形成;及扭力弹簧137,其设于螺母125与凸缘136之间而将螺母125相对于凸缘136而弹性支承,在主轴121或凸缘136超过预定的旋转角的情况下,压缩或膨胀成原来的形态,从而引导螺母125及调整螺钉的第一方向旋转或第二方向旋转。
58.凸缘136在主轴121的中央部121b在半径方向上扩展而形成,并固定于主轴121而与主轴121一体旋转。在凸缘136的背面可以设有实现凸缘136的顺利的旋转且防止凸缘136与周边部件之间的磨损的轴承150。
59.扭力弹簧137的一端插入并固定在螺母125的外周面上,另一端插入并固定在凸缘
136。扭力弹簧137在预定的旋转角例如车辆的制动解除状态与制动状态之间的主轴121的旋转角之内保持压缩或膨胀的状态,在超过预定的旋转角的情况下,进行压缩或膨胀,以恢复成原来的状态,从而引导螺母125及调整螺钉131的第一方向旋转或第二方向旋转。
60.具体地,在驱动前状态或车辆的制动解除状态下,在转换为车辆的制动状态时,通过主轴121的第一方向旋转角而产生的弹性恢复力小于调整螺钉131与活塞110之间的螺纹紧固力。由此,在一般的车辆的制动时,即便主轴121及凸缘136在第一方向上进行旋转,扭力弹簧137保持压缩的状态,使相对于螺母125或主轴121的活塞110的相对位置保持固定不变。
61.在为了执行针对制动垫片10的磨损的补偿制动动作,用于进行车辆的制动的主轴121的第一方向旋转角超过预定的旋转角的情况下,机电式制动器100使扭力弹簧137的弹性恢复力大于调整螺钉131与活塞110之间的螺纹紧固力,从而扭力弹簧137被膨胀,以恢复成原来的形态,通过扭力弹簧137的膨胀,产生螺母125及调整螺钉131的第一方向旋转。因此,相对于螺母125或主轴121的活塞110的相对位置前进。
62.在为了进行针对拖滞现象的补偿制动解除动作,用于进行车辆的制动解除的主轴121的第二方向旋转角超过预定的旋转角的情况下,机电式制动器100使扭力弹簧137的弹性恢复力大于调整螺钉131与活塞110之间的螺纹紧固力,从而扭力弹簧137被压缩,以恢复成原来的形态,通过扭力弹簧137的压缩,产生螺母125及调整螺钉131的第二方向旋转。因此,相对于螺母125或主轴121的活塞110的相对位置后退。
63.力传感器141测量制动盘(未图示)与制动垫片10之间的紧贴力或夹紧力。力传感器141感测主轴121或致动器160的负荷而测量制动盘(未图示)与制动垫片10之间的夹紧力。力传感器141将制动盘(未图示)与制动垫片10之间的夹紧力信息传送到控制部220。
64.马达位置传感器142测量马达161的旋转角度。马达位置传感器142在制动动作模式时测量马达161的第一旋转角度,在制动动作解除模式时测量马达161的第二旋转角度。制动动作模式包括用于执行机电式制动器100的制动动作的模式和用于执行机电式制动器100的针对制动垫片磨损的补偿制动动作的模式中的至少一个模式。制动动作解除模式包括用于执行机电式制动器100的制动解除动作的模式和用于执行机电式制动器100的针对拖滞现象的补偿制动解除动作的模式中的至少一个模式。马达位置传感器142将马达161的第一旋转角度信息和马达161的第二旋转角度信息传送到控制部220。
65.图4表示包括在一个实施例的机电式制动系统中的机电式制动器的制动动作。
66.参照图4,机电式制动器100利用致动器160而使主轴121向第一方向旋转,从而使螺母125前进而对活塞110加压,通过螺母125的移动而被加压的活塞110对内侧垫板11加压而使制动垫片10紧贴到制动盘(未图示),从而执行产生夹紧力的制动动作。
67.此时,主轴121向第一方向旋转而将扭力弹簧137压缩,但从车辆的制动解除状态到车辆的制动状态为止通过预定的第一方向旋转角而产生的扭力弹簧137的弹性恢复力小于调整螺钉131与活塞110之间的螺纹紧固力,因此在一般的制动动作中,不发生螺母125及调整螺钉131的旋转。因此,可将相对于螺母125或主轴121的活塞110的相对位置保持固定不变。
68.图5表示包括在一个实施例的机电式制动系统中的机电式制动器的制动解除动作。
69.参照图5,机电式制动器100利用致动器160而使主轴121向第二方向旋转,从而使对活塞110加压的螺母125进行后退移动,通过螺母125的后退移动而解除对活塞110的加压,通过解除对活塞110的加压,使制动垫片10从制动盘(未图示)隔开,从而执行解除所产生的夹紧力的制动解除动作。
70.此时,主轴121的第二方向旋转角在一般的制动动作中相应于主轴121的第一方向旋转角,由此扭力弹簧137根据主轴121的第二方向旋转而恢复成原来的形态。
71.图6表示包括在一个实施例的机电式制动系统中的机电式制动器的针对制动垫片磨损的补偿制动动作。
72.参照图6,机电式制动器100利用致动器160而使主轴121向第一方向超过预定的旋转角而进行旋转,从而产生螺母125及调整螺钉131的旋转而对活塞110进一步加压,通过螺母125及调整螺钉131的旋转而进一步加压的活塞110对内侧垫板11进一步加压而使制动垫片10进一步紧贴到制动盘(未图示),从而执行针对制动垫片10的磨损的补偿制动动作。
73.此时,主轴121向第一方向进行追加旋转而使扭力弹簧137比一般的制动动作更加压缩,从而扭力弹簧137的弹性恢复力大于调整螺钉131与活塞110之间的螺纹紧固力,因此扭力弹簧137为了恢复成原来的形态而膨胀,从而产生螺母125及调整螺钉131的第一方向旋转。因此,相对于螺母125或主轴121的活塞110的相对位置前进而补偿制动垫片10的磨损。
74.图7表示包括在一个实施例的机电式制动系统的机电式制动器的针对拖滞现象的补偿制动解除动作。
75.参照图7,机电式制动器100利用致动器160而使主轴121超过预定的旋转角而向第二方向旋转,从而产生螺母125及调整螺钉131的旋转而对活塞110进一步解除加压,使通过螺母125及调整螺钉131的旋转而进一步解除加压的活塞110从内侧垫板11进一步隔开,从而执行针对制动垫片10的拖滞现象的补偿制动解除动作。
76.此时,使主轴121向第二方向追加旋转而使扭力弹簧137比一般的制动解除动作更加膨胀,从而扭力弹簧137的弹性恢复力大于调整螺钉131与活塞110之间的螺纹紧固力,因此扭力弹簧137为了恢复成原来的形态而进行压缩,从而产生螺母125及调整螺钉131的第二方向旋转。因此,相对于螺母125或主轴121的活塞110的相对位置后退,由此降低活塞110不恢复到原来的位置的拖滞。
77.一个实施例的机电式制动系统基于通过马达位置传感器而获得的马达的第一旋转角度信息和第二旋转角度信息而算出主轴的第一旋转角度和第二旋转角度,当在所算出的第一旋转角度与所算出的第二旋转角度之间存在差异时,向驾驶者实时通知制动垫片的磨损状态而引导制动垫片的更换。
78.图8表示一个实施例的机电式制动系统的结构。
79.参照图8,机电式制动系统200包括马达161、马达驱动部210及控制部220。
80.控制部220可以通过制动踏板位置传感器而接收制动踏板信息,可以从执行车辆内的网络即can(controller area network:控制器局域网)通信的其他系统接收制动踏板信息。例如,控制部220从abs系统或tcs系统接收制动踏板信息。制动踏板信息是驾驶者所踩下的制动踏板操作信号。控制部220从力传感器141接收制动盘(未图示)与制动垫片10之间的夹紧力信息。
81.控制部220通过根据由驾驶者踩下制动踏板的操作而生成的制动信号来驱动马达161。控制部220根据通过由驾驶者踩下制动踏板的操作而生成的制动信号来执行制动动作(apply)模式或制动动作解除(release)模式。
82.马达驱动部210使马达161驱动。马达驱动部210使马达161向第一方向或第二方向驱动。当马达驱动部210使马达161向第一方向驱动时,使机电式制动器100执行制动动作,当使马达161向第二方向驱动时,使机电式制动器100执行制动解除动作。马达驱动部210生成使马达161向第一方向或第二方向驱动的马达电流来施加到马达161。例如,马达驱动部210包括由多个功率开关元件构成的h桥(h-bridge)电路,以使马达161向第一方向或第二方向驱动。
83.控制部220包括处理器221和存储器222。
84.处理器221在机电式制动器100的制动动作模式时算出主轴121的第一旋转角度。处理器221接收在制动动作模式时通过马达位置传感器142而获得的马达161的第一旋转角度信息,并基于接收的马达161的第一旋转角度信息而算出主轴121的第一旋转角度。当马达161的旋转为第一方向旋转时,处理器221判断为制动动作模式,并基于接收的马达161的第一旋转角度信息而算出主轴121的第一旋转角度。制动动作模式包括用于执行机电式制动器100的制动动作的模式和用于执行机电式制动器100的针对制动垫片磨损的补偿制动动作的模式中的至少一个模式。
85.在机电式制动器100为制动动作解除模式时,处理器221算出主轴121的第二旋转角度。处理器221接收在制动动作解除模式时通过马达位置传感器142而获得的马达161的第二旋转角度信息,并基于接收的马达161的第二旋转角度信息而算出主轴121的第二旋转角度。在马达161的旋转为第二方向旋转时,处理器221判断为制动动作解除模式,并基于接收的马达161的第二旋转角度信息而算出主轴121的第二旋转角度。制动动作解除模式包括用于执行机电式制动器100的制动解除动作的模式和用于执行机电式制动器100的针对拖滞现象的补偿制动解除动作的模式中的至少一个模式。
86.当所算出的主轴121的第一旋转角度与所算出的主轴121的第二旋转角度之间存在差异时,处理器221控制通知装置300,以通知制动垫片10的磨损状态。通知装置300通知与前轮机电式制动器和后轮机电式制动器中的相应机电式制动器有关的制动垫片10的磨损状态。例如,通知装置300通知与前轮左侧机电式制动器、前轮右侧机电式制动器、后轮左侧机电式制动器、后轮右侧机电式制动器等有关的制动垫片10的磨损状态。
87.当算出的主轴121的第一旋转角度与算出的主轴121的第二旋转角度之间存在差异时,处理器221进一步算出与旋转角度的差异值对应的活塞110的调整冲程值。
88.图9表示算出在一个实施例的机电式制动系统中与主轴的旋转角度的差异值对应的活塞的调整冲程值的情况。
89.参照图9,在所算出的制动动作模式时的主轴121的第一旋转角度a与所算出的制动动作解除模式时的主轴121的第二旋转角度b之间存在差异时,处理器221可算出与旋转角度的差异值c对应的活塞的调整冲程值d。
90.作为实验例,机电式制动器100根据驾驶者踩下的制动踏板的操作而分别以一次制动状态、二次制动状态、三次制动状态、四次制动状态执行制动动作和制动解除动作。处理器221算出与一次制动状态、二次制动状态、三次制动状态、四次制动状态有关的旋转角
度的差异值c和与旋转角度的差异值c对应的活塞的调整冲程值d。例如,处理器221判断为与二次制动状态和四次制动状态有关的旋转角度的差异值c为“5”和“7”,与“5”和“7”对应地将活塞的调整冲程值d计算为“0.11”和“0.16”。此时,在以二次制动状态和四次制动状态执行制动动作和制动解除动作时,处理器221判断为制动垫片10为磨损的状态。
91.图10表示在一个实施例的机电式制动系统中算出根据主轴的旋转角度的差异值而所需的活塞的调整冲程值的过程。
92.参照图10,在算出的制动动作模式时的主轴121的第一旋转角度与算出的制动动作解除模式时的主轴121的第二旋转角度之间存在差异时,处理器221算出根据主轴的旋转角度的差异值而所需的活塞的调整冲程值。此时,ts1为根据旋转角度的差异值而所需的制动动作解除方向的活塞的调整冲程值,旋转角度的差异值为“5”时,将制动动作解除方向的活塞的调整冲程值输出为“0.11”,在旋转角度的差异值为“7”时,将制动动作解除方向的活塞的调整冲程值输出为“0.16”。另一方面,s1为制动动作方向的活塞的冲程值,s2为调节器的冲程值,s3为螺母的冲程值。
93.处理器221进一步控制马达驱动部210,以旋转马达161,使活塞110的相对位置与算出的活塞110的调整冲程值对应地前进。例如,处理器221与活塞的调整冲程值d即“0.11”和“0.16”对应地控制马达驱动部210。
94.处理器221包括处理马达161的第一旋转角度信息和第二旋转角度信息的数字信号处理器和生成用于通知制动垫片10的磨损状态的通知信号的微控制单元(micro control unit,mcu)。
95.存储器222存储有处理器221用于处理马达161的第一旋转角度信息和第二旋转角度信息的程序及/或数据和处理器221用于生成通知制动垫片10的磨损状态的通知信号的程序及/或数据。
96.存储器222临时存储马达161的第一旋转角度信息和第二旋转角度信息,并临时存储处理器221的马达161的第一旋转角度信息和第二旋转角度信息的处理结果。
97.存储器222可以不仅包括s随机存取存储器(s-ram)、d随机存取存储器(d-ram)等易失性存储器,而且还包括闪存、只读存储器(read only memory,ro m)、可擦除可编程只读存储器(erasable programmable read only memory:epro m)等非易失性存储器。
98.图11表示一个实施例的机电式制动系统的控制方法。
99.参照图11,控制部220根据由驾驶者踩下的制动踏板的操作而执行机电式制动器100的制动动作模式时,接收通过马达位置传感器142而获得的马达161的第一旋转角度信息(1110)。控制部220基于所接收的马达161的第一旋转角度信息而算出主轴121的第一旋转角度(1120)。在马达161进行第一方向旋转时,控制部220判断为制动动作模式。制动动作模式包括用于执行机电式制动器100的制动动作的模式和用于执行机电式制动器100的针对制动垫片磨损的补偿制动动作的模式中的至少一个模式。
100.在机电式制动器100为制动动作解除模式时,控制部220接收通过马达位置传感器142而获得的马达161的第二旋转角度信息(1130)。控制部220基于所接收的马达161的第二旋转角度信息而算出主轴121的第二旋转角度(1140)。在马达161进行第二方向旋转时,控制部220判断为制动动作解除模式。制动动作解除模式包括用于执行机电式制动器100的制动解除动作的模式和用于执行机电式制动器100的针对拖滞现象的补偿制动解除动作的模
式中的至少一个模式。
101.控制部220判断所算出的主轴121的第一旋转角度与所算出的主轴121的第二旋转角度之间是否存在差异(1150)。当所算出的主轴121的第一旋转角度与所算出的主轴121的第二旋转角度之间存在差异时,控制部220判断为制动垫片10磨损的状态。
102.在算出的主轴121的第一旋转角度与算出的主轴121的第二旋转角度之间存在差异时,控制部220控制通知装置300,以通知制动垫片10的磨损状态(1160)。
103.图12表示在应用一个实施例的机电式制动系统的车辆中设置仪表中央盒的情况。
104.参照图12,通知装置300可以是位于设置在车辆1内的驾驶座与副驾驶座之间的仪表板,并设有向驾驶者显示制动垫片的磨损状态或输出语音及影像的avn(audio/video/navigation,音频/视频/导航)装置的显示器面板301的仪表中央盒(center fascia)。通知装置300通知与前轮机电式制动器和后轮机电式制动器中的相应机电式制动器有关的制动垫片的磨损状态。通知装置300不限于图示的情况,可通过仪器盘或另设的终端而显示制动垫片的磨损状态,通过设于驾驶者的车窗的hud(head-up display:平视显示器)装置而显示制动垫片的磨损状态。
105.图13表示在应用一个实施例的机电式制动系统的车辆的仪表中央盒中通过显示器面板而通知关于前轮左侧机电式制动器的制动垫片的磨损状态。
106.参照图13,通知装置300通过显示器面板301而通知关于前轮左侧机电式制动器的制动垫片的磨损状态。不限于图示的情况,通知装置300可通知与前轮右侧机电式制动器、后轮左侧机电式制动器、后轮右侧机电式制动器等有关的制动垫片的磨损状态。
107.另一方面,在动作模式1150的判断结果,如果所算出的主轴121的第一旋转角度与所算出的主轴121的第二旋转角度之间不存在差异,则不控制通知装置300,以不通知制动垫片10的磨损状态。
108.在算出的主轴121的第一旋转角度与算出的主轴121的第二旋转角度之间存在差异时,控制部220进一步算出与旋转角度的差异值对应的活塞110的调整冲程值(1170)。控制部220算出与一次制动状态、二次制动状态、三次制动状态、四次制动状态有关的旋转角度的差异值c和与旋转角度的差异值c对应的活塞的调整冲程值d。例如,控制部220判断与二次制动状态和四次制动状态有关的旋转角度的差异值c为“5”和“7”,与“5”和“7”对应地将活塞的调整冲程值d算出为“0.11”和“0.16”。
109.控制部220进一步控制马达驱动部210,以旋转马达161,使活塞110的相对位置与算出的活塞110的调整冲程值对应地前进(1180)。例如,控制部220与活塞的调整冲程值d即“0.11”和“0.16”对应地控制马达驱动部210。马达161与算出的活塞110的调整冲程值对应地向制动动作解除方向产生旋转力。
110.以往的机电式制动系统利用电子制动垫片磨损传感器或机械式制动垫片磨损传感器而感测制动垫片的磨损状态。
111.如上所述,一个实施例的机电式制动系统200不利用电子制动垫片磨损传感器或机械式制动垫片磨损传感器,基于通过马达位置传感器142而获得的马达161的第一旋转角度信息和第二旋转角度信息而算出主轴121的第一旋转角度和第二旋转角度,当所算出的第一旋转角度与所算出的第二旋转角度之间存在差异时,通过通知装置300而向驾驶者实时通知制动垫片10的磨损状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1