改造普通汽车为自动驾驶汽车的方法、适配该方法的装置和装置的工作方法与流程
1.本技术涉及车辆锁固设备技术领域,特别地涉及一种改造普通汽车为自动驾驶汽车的方法、自动驾驶拖车租赁方法、拖车、车辆自动固定装置和车辆自动固定方法。
背景技术:
2.车辆产业的发展,不仅方便了人们的出行,还直接推动了相关行业的技术更新和技术改造,促进了煤炭、石油、电力、地质等部门的现代化。然而,汽车在使用中可能会出现故障。车主遭遇小故障可自行驱车前往修理店或4s店维修,一些造成汽车抛锚的大故障则只能原地等待拖车救援。
3.现有技术通常人工锁固车辆和拖车,效率较低,且人工锁固的车辆可靠性较低,可能存在车辆和拖车分离的情况,绑带的瞬间断裂还会打伤人,甚至造成车辆因瞬时力改变,而与后车发生追尾事故。
4.而随着科学技术的进步,人们对汽车工业发展提出了新的要求,自动驾驶汽车也应运而生。自动驾驶汽车(autonomous vehicles;self-driving automobile)又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。自动驾驶能够大幅提升道路交通智能化水平和交通运行效率,随着社会的不断进步与发展,自动驾驶汽车逐渐呈现出接近实用化的趋势。
5.然而当今社会仍旧以购买和使用人工驾驶汽车为主,如若人工驾驶汽车与自动驾驶汽车同时上路进入自动驾驶区域,则影响交通运行效率;若将存量人工驾驶汽车置换为自动驾驶汽车则成本较大,且不环保。
6.因此,亟需一种适用于自动驾驶场景的、能够提高普通的车辆从人工驾驶状态切换为自动驾驶状态的效率和可靠性的方法和装置。
技术实现要素:
7.为了解决或至少部分地解决上述技术问题,本技术提供了一种改造普通汽车为自动驾驶汽车的方法,包括如下步骤:
8.响应于车辆到达预设位置的定位信号,升起第二挡块,使车辆的待锁固轮胎位于第一挡块和第二挡块之间,预设位置为自动驾驶拖车的汽车固定位置;
9.吐出弹性条,使弹性条绕待锁固轮胎运动,直至弹性条进入收纳机构所预留的入口内;
10.锁定弹性条以锁固待锁固轮胎,将车辆固定在自动驾驶拖车上;
11.由自动驾驶拖车携带车辆行驶。
12.本技术还提供了一种车辆自动固定方法,包括如下步骤:
13.响应于车辆到达预设位置的定位信号,升起第二挡块,使车辆的待锁固轮胎位于第一挡块和第二挡块之间;
14.吐出弹性条,使弹性条绕待锁固轮胎运动,直至弹性条进入收纳机构所预留的入口内;
15.锁定弹性条以锁固待锁固轮胎。
16.优选地,在升起第二挡块的步骤之前,还包括:
17.获取车辆的轮胎尺寸信息;
18.根据轮胎尺寸信息,调整第一挡块和/或第二挡块的位置。
19.优选地,在升起第二挡块的步骤之前,还包括:获取车辆的前后轮的轮距;
20.在响应于车辆到达预设位置的定位信号的步骤之后,还包括:
21.响应于定位信号,升起第一挡块,使车辆的四个轮胎均位于所对应的第一挡块和第二挡块之间。
22.优选地,在弹性条进入入口内的步骤之后,还包括:
23.收纳机构涨紧弹性条。
24.本技术还提供了一种车辆自动固定装置,包括:
25.第一挡块和第二挡块;
26.第二移动机构,与第二挡块连接;
27.收纳机构、输送机构以及安装在输送机构上的弹性条,输送机构和收纳机构能够被锁定,输送机构的出口位于第一挡块或第二挡块两者中的任意一者的所在侧;收纳机构的入口位于另一者的所在侧;
28.定位传感器,分别与第二移动机构、输送机构和收纳机构通信连接,定位传感器在车辆到达预设位置时,发出定位信号;
29.第二移动机构响应于定位信号升起第二挡块,使车辆的待锁固轮胎位于第一挡块和第二挡块之间;
30.输送机构响应于定位信号吐出弹性条,使弹性条绕待锁固轮胎运动,直至弹性条进入收纳机构所预留的入口内;
31.收纳机构和输送机构锁定弹性条以锁固待锁固轮胎。
32.优选地,还包括:
33.获取装置和第一移动机构,获取装置与第一移动机构和/或第二移动机构通信连接,用于获取车辆的轮胎尺寸信息,发出轮胎尺寸信号;
34.第一移动机构能够根据轮胎尺寸信号调整第一挡块的位置;
35.第二移动机构能够根据轮胎尺寸信号调整第二挡块的位置。
36.优选地,还包括:
37.第一挡块和第二挡块有四组,且与车辆的四个轮胎各自对应设置;
38.获取装置还用于获取车辆的前后轮的轮距,发出轮距信号;
39.第一移动机构能够根据轮距信号调整第一挡块的位置;
40.第二移动机构能够根据轮距信号调整第二挡块的位置。
41.第二移动机构响应于定位信号升起四组第二挡块,第一移动机构响应于定位信号升起至少两组位于同一排的第一挡块,使车辆的四个轮胎均位于所对应的第一挡块和第二挡块之间。
42.优选地,四组第一挡块和第二挡块中,有两组位于同一排的第一挡块固定设置。
43.优选地,定位传感器安装在固定设置的第一挡块上;或者,
44.定位传感器安装在任意一组第一挡块和第二挡块之间;
45.优选地,第二移动机构包括:
46.液压平台和设置在液压平台上的升降机,第一挡块和/或第二挡块设置在升降机上,升降机用于带动第一挡块和/或第二挡块在高度方向上运动,液压平台用于带动升降机及第一挡块和/或第二挡块在水平方向上运动。
47.优选地,第一挡块和/或第二挡块上设置有开口,开口构成出口和/或入口。
48.优选地,各开口中,入口所对应的开口的直径自外向内逐渐减小,以用于引导弹性条进入开口内。
49.优选地,弹性条在自身弹力的作用下趋向于向着轮胎的所在方向弯曲,弹性条上沿自身长度方向等距地间隔设置有多个孔。
50.优选地,收纳机构包括:由电机驱动的齿轮,以及设置在齿轮的轴上的碟刹,齿轮的齿的间隔与孔的间隔一致;
51.入口正对齿轮以接入弹性条,弹性条的孔与齿轮的齿相互啮合,以通过齿轮带动弹性条运动。
52.本技术借助第一挡块、第二挡块和弹性条锁固待锁固轮胎,能够快速锁固车辆。第一挡块和第二挡块的位置可以根据实际需要进行调整,以实现适配不同尺寸的轮胎,提高了车辆自动固定装置的通用性。
53.本技术还提供了一种用于车辆的锁固后自动驾驶方法,包括如下步骤:
54.响应于所述车辆到达预设位置的定位信号,升起第二挡块,使所述车辆的待锁固轮胎位于第一挡块和所述第二挡块之间,所述预设位置为自动驾驶拖车的汽车固定位置;
55.吐出弹性条,使所述弹性条绕所述待锁固轮胎运动,直至所述弹性条进入收纳机构所预留的入口内;
56.锁定所述弹性条以锁固所述待锁固轮胎,将所述车辆固定在自动驾驶拖车上;
57.由所述自动驾驶拖车携带所述车辆行驶。
58.借助将本技术的车辆自动固定方法和装置,将车辆固定在自动驾驶拖车上,可以实现人工驾驶车辆和自动驾驶车辆的切换。
59.本技术还提供了一种拖车,包括车体和设置在车体上的车辆自动固定装置,其中,车辆自动固定装置的数量为2或4。
60.本技术还提供了一种自动驾驶拖车租赁方法,包括:
61.获取用户上传的租赁地址和目标地址;
62.自动行驶至租赁地址,利用上述的车辆自动固定方法,将目标车辆锁固在自动驾驶拖车上;自动行驶至目标地址。
附图说明
63.为了更清楚地说明本技术的实施方式,下面将对相关的附图做出简单介绍。可以理解,下面描述中的附图仅用于示意本技术的一些实施方式,本领域普通技术人员还可以根据这些附图获得本文中未提及的许多其他的技术特征和连接关系等。
64.图1为本技术第一实施方式提供的一种车辆自动固定装置的结构示意图;
65.图2为本技术第一、第四至第六实施方式提供的一种车辆自动固定装置和拖车的结构框图;
66.图3为本技术第一至第三实施方式提供的一种车辆自动固定装置的俯视示意图;
67.图4为本技术第一至第三实施方式提供的一种车辆自动固定装置的结构示意图;
68.图5为本技术第三实施方式提供的一种车辆自动固定装置的收纳机构的结构示意图;
69.图6为本技术第四实施方式提供的一种车辆自动固定装置和拖车的结构示意图;
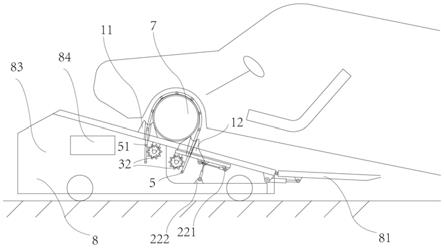
70.图7为本技术第五实施方式提供的一种车辆自动固定装置和拖车的使用状态示意图;
71.图8为本技术第五实施方式提供的一种车辆自动固定装置和拖车的结构示意图。
72.图中的附图标记及名称如下:
73.11、第一挡块;12、第二挡块;13、开口;
74.21、第一移动机构;22、第二移动机构;221、液压平台;222、升降机;
75.3、收纳机构;31、电机;32、齿轮;33、碟刹;
76.4、输送机构;
77.5、弹性条;51、孔;
78.61、定位传感器;62、获取装置;
79.7、待锁固轮胎;
80.8、拖车;81、尾板;82、控制模块;83、车体;84、自动行驶传感器。
具体实施方式
81.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行详细说明。
82.本技术的发明人发现,人工锁固车辆,效率较低;另外,遭遇台风、暴雨等极端天气时,可能无法保证车辆锁固的牢固性。
83.有鉴于此,本技术提供了一种车辆自动固定装置及车辆自动固定方法,以便于快速锁固不同品牌、不同型号的车辆,且具有很好的通用性和可靠性。
84.实施方式一
85.本技术提供了一种车辆自动固定装置,结合图1、图2所示,包括:
86.第一挡块11和第二挡块12;
87.第二移动机构22,与第二挡块12连接;
88.收纳机构3、输送机构4以及安装在输送机构4上的弹性条5,输送机构4和收纳机构3能够被锁定,输送机构4的出口位于第一挡块11或第二挡块12两者中的任意一者的所在侧;收纳机构3的入口位于另一者的所在侧;
89.定位传感器61,分别与第二移动机构22、输送机构4和收纳机构3通信连接,定位传感器61在车辆到达预设位置时,发出定位信号;
90.第二移动机构22响应于定位信号升起第二挡块12,使车辆的待锁固轮胎7位于第一挡块11和第二挡块12之间;
91.输送机构4响应于定位信号吐出弹性条5,使弹性条5绕待锁固轮胎7运动,直至弹
性条5进入收纳机构3所预留的入口内;
92.收纳机构3和输送机构4锁定弹性条5以锁固待锁固轮胎7。
93.本技术所设置的第一挡块11和第二挡块12能够限制车辆的位移,使得待锁固轮胎7位于第一挡块11和第二挡块12之间,所设置的弹性条5能够绕待锁固轮胎7运动并将其锁固,因此能够快速锁固车辆,相较于人工锁固而言,效率更高,可靠性更好。
94.其中,弹性条5可以是具有一定曲度的卷钢,具有一定曲度的弹性条5能够更好地沿着轮胎的外轮廓前进,进而保证弹性条5能够绕待锁固轮胎7运动,并进入收纳机构3所预留的入口内。相较于人工锁固而言,自动锁固的过程中人员无需在旁,降低了意外发生的可能,具有更好的安全性。当然,弹性条5也可以采用铝等金属材质制成。
95.当然,定位传感器61能够感受车辆位置并转换成可用输出信号的传感器,可以是接触式传感器,也可以是接近式传感器,在车辆到达预设位置时,均可以发出定位信号并将定位信号发送给第二移动机构22,从而使得第二挡块12升起,进而将车辆的待锁固轮胎7固定于第一挡块11和第二挡块12之间。优选地,定位传感器61可以安装在第一档块上,以提高车辆自动固定装置的响应速度。
96.可以理解地,不同品牌、不同型号的车辆,其轮胎尺寸可能有所不同。因此,在本实施方式中,参见图2所示,车辆自动固定装置还可以包括:
97.获取装置62和第一移动机构21,获取装置62与第一移动机构21和/或第二移动机构22通信连接,用于获取车辆的轮胎尺寸信息,发出轮胎尺寸信号;
98.第一移动机构21能够根据轮胎尺寸信号调整第一挡块11的位置;
99.第二移动机构22能够根据轮胎尺寸信号调整第二挡块的位置。
100.获取装置62能够获取车辆的轮胎尺寸信息,第一移动机构21和/或第二移动机构22能够根据获取装置62获取的轮胎尺寸信号调整第一挡块11和/或第二挡块12的位置,因此针对不同的车辆本技术均能够快速锁固,提高了车辆自动固定装置的效率和适用性。
101.其中,获取装置62可以是设置在第一挡块11处的光学传感器,通过距离的测量调整车辆前后轮的轴距(第一挡块11和第二挡块12的位置)、车辆左右轮的轮距(第一挡块11和第一挡块11的位置、第二挡块12和第二挡块12的位置)以及轮胎的尺寸。当然,本技术也可以通过与用户的车机、甚至是手机连接,获取包含车机数据,或是获取用户手动输入数据的轮胎尺寸信号以调整第一挡块11和/或第二挡块12的位置,其具体的选择并不会对本技术造成限定。
102.参见图2、4所示,第二移动机构22可以包括:液压平台221和设置在液压平台221上的升降机222;第一挡块11和/或第二挡块12设置在升降机222上,升降机222用于带动第一挡块11和/或第二挡块12在高度方向上运动,液压平台221用于带动升降机222及第一挡块11和/或第二挡块12在水平方向上运动。液压平台221和设置在液压平台221上的升降机222能够快速调整第一挡块11和第二挡块12的位置,提高了锁固车辆的效率。
103.在本实施方式中,参见图1、图4所示,车辆自动固定装置可以安装在地面,例如停车场、停机坪等,地面可以是水平面也可以是斜面。车主操作人工驾驶车辆驶入目标位置,车辆自动固定装置可以快速锁固待锁固轮胎7,一方面可以防止车辆被盗,另一方面能够更好地应对台风、暴雨等极端天气,相较于人工锁固而言,本实施方式车辆自动固定装置效率高,可靠性强。
104.本实施方式还提供了一种车辆自动固定方法,包括如下步骤:
105.响应于车辆到达预设位置的定位信号,升起第二挡块12,使车辆的待锁固轮胎7位于第一挡块11和第二挡块12之间;
106.吐出弹性条5,使弹性条5绕待锁固轮胎7运动,直至弹性条5进入收纳机构3所预留的入口内;
107.锁定弹性条5以锁固待锁固轮胎7。
108.本技术所设置的第一挡块11和第二挡块12能够限制车辆的位移,使得待锁固轮胎7位于第一挡块11和第二挡块12之间。所设置的弹性条5能够绕待锁固轮胎7运动并将其锁固,因此能够快速锁固车辆,相较于人工锁固而言,具有更好的可靠性。
109.在升起第二挡块12的步骤之前,还可以包括:
110.获取车辆的轮胎尺寸信息;
111.根据轮胎尺寸信息,调整第一挡块11和/或第二挡块12的位置。本实施方式通过获取车辆的轮胎尺寸信息能够调整第一挡块11和/或第二挡块12的位置,因此能够更好地匹配不同的车辆。
112.在升起第二挡块的步骤之前,还可以包括:获取车辆的前后轮的轮距;
113.在响应于车辆到达预设位置的定位信号的步骤之后,还可以包括:
114.响应于定位信号,升起第一挡块11,使车辆的四个轮胎均位于所对应的第一挡块11和第二挡块之间。
115.本实施方式借助所获取的轮胎尺寸信号调整第一挡块11和/或第二挡块12的位置,因此针对不同的车辆本技术均能够快速锁固,提高了车辆自动固定装置的效率和适用性。
116.在弹性条5进入入口内的步骤之后,还可以包括:收纳机构3涨紧弹性条5。输送机构4带动弹性条5运动,收纳机构3能够提供指向弹性条5的压力,使得弹性条5能够保持合适的涨紧程度,从而能够将车辆稳固地锁固于车辆自动固定装置上,提高了车辆自动固定装置的可靠性。
117.若弹性条5涨紧时过于紧绷,则可能产生断裂,影响使用寿命;若弹性条5略松则导致车辆和地面的连接不牢固,影响锁固效果。
118.本技术的实施方式借助在第一挡块11、第二挡块12和弹性条5锁固待锁固轮胎7,能够快速锁固车辆,提高效率。第一挡块11和第二挡块12的位置可以根据实际需要进行调整,以实现适配不同尺寸的轮胎,提高了车辆自动固定装置的通用性。
119.实施方式二
120.本技术的第二实施方式提供了一种车辆自动固定装置。第二实施方式是第一实施方式的进一步改进,主要改进之处在于,在本技术的第二实施方式中,参见图4所示,第一挡块11和/或第二挡块12上可以设置有开口13,开口13构成出口和/或入口。相较于将开口13设置于第一挡块11或第二挡块12的一侧而言,本实施方式将开口13设置于第一挡块11和/或第二挡块12上,无需设置弹出弹性条5的开口结构,更小型化。
121.优选地,各开口13中,入口所对应的开口13的直径可以自外向内逐渐减小,以用于引导弹性条5进入开口13内,实现导向的效果,从而能够使得弹性条5精准地朝向轮胎位置弹出,提高了自动化程度。
122.实施方式三
123.本技术的发明人发现,在借助弹性条5固定待锁固轮胎7时,由于车轮的尺寸不同,收纳机构3涨紧弹性条5的程度有所不同。为此本技术的发明人在上述实施例中进行了优化设计,通过增加传动组件,以提高车辆自动固定装置的锁固效果。
124.在本实施方式中,弹性条5可以在自身弹力的作用下趋向于向着轮胎的所在方向弯曲,从而能够保证弹性条5弹出后能够包裹住轮胎。
125.在本技术的实施方式中,为了进一步保证弹性条5在弹出后形成可靠的锁固,可对弹性条5与收纳机构3增加进一步的固定方式:结合图4、图5所示,弹性条5上沿自身长度方向可以等距地间隔设置有多个孔51;
126.收纳机构3还可以包括:由电机31驱动的齿轮32,以及设置在齿轮32的轴上的碟刹33,齿轮32的齿的间隔与孔51的间隔一致;
127.入口正对齿轮32以接入弹性条5,弹性条5的孔51与齿轮32的齿相互啮合,以通过齿轮32带动弹性条5运动。
128.本实施方式通过电机31推动弹性条5,使其沿着轮胎弧形前进,由于弹性条5可以在自身弹力的作用下趋向于向着轮胎的所在方向弯曲,因此能够紧固轮胎。弹性条5和收纳机构3通过齿轮32连接,并借助设置在齿轮32的轴上的碟刹33使得弹性条5涨紧,从而将其锁紧在收纳机构3上,进一步提高了车辆自动固定装置的可靠性。
129.实施方式四
130.本技术的发明人发现,人工锁固车辆和拖车,效率较低,且人工锁固的车辆可靠性较低,可能存在车辆和拖车分离的情况,绑带的瞬间断裂还会打伤人,甚至造成车辆因瞬时力改变,而与后车发生追尾事故。
131.有鉴于此,本技术提供了一种车辆自动固定装置及拖车,以便于快速锁固不同品牌、不同型号的车辆,且具有很好的通用性和可靠性。
132.本技术的拖车8,可以包括车体83和设置在车体83上的车辆自动固定装置,其中,车辆自动固定装置的数量可以为2。也就是说,车辆的前轮可以锁固于拖车8上。相较于人工锁固而言,自动锁固的过程中人员无需在旁,降低了意外发生的可能,具有更好的安全性。
133.在本实施方式的一种应用场景中,参见图6所示,车辆自动固定装置可以安装在拖车8上,该拖车8可以应用于道路故障、城市违章及抢险救援等场景。车主操作车辆,借助拖车8上的尾板81驶上斜面,第一移动机构21和/或第二移动机构22能够根据轮胎尺寸信号调整第一挡块11和/或第二挡块12的位置。
134.当前车轮接触第一档块11时,定位传感器61可以发出定位信号,尾板81收起;第二移动机构22响应于定位信号升起第二挡块12,使车辆的待锁固轮胎7位于第一挡块11和所述第二挡块12之间。另外,参见图6所示,输送机构4可以响应于定位信号吐出弹性条5,使弹性条5绕待锁固轮胎7运动,直至弹性条5进入收纳机构3所预留的入口内;收纳机构3和输送机构4可以锁定弹性条5以锁固待锁固轮胎7。将车辆与拖车8锁固之后,即可通过拖车8上的控制模块82启动拖车8。
135.本实施方式车辆自动固定装置结构简单、自动化程度高,因此能够提高操作的效率,实现快速锁固。
136.值得一提的是,拖车8处于空载状态时,第二挡块12未升起,因此拖车8表面存在间
隙,导致车辆驶入时会产生明显颠簸,影响驾驶体验。
137.为此,在本实施方式中,收纳机构3所预留的入口可以设置有挡板,挡板可以与升降机222或液压平台221连接。第二挡块12未升起时,所设置的挡板能够消除间隙,从而使得车辆更平滑地驶入目标位置,减少震荡。当前车轮接触第一档块时,定位传感器61发出定位信号,第二移动机构22能够响应于定位信号移动挡板,并升起第二挡块12,使得车辆的待锁固轮胎7位于第一挡块11和所述第二挡块12之间。
138.当然,也可以不设置挡板,而是将间隙设置得较小,例如间隙的宽度可以小于轮胎的直径。其中,间隙的大小也可以响应于轮胎尺寸信号根据车辆的不同适应性调整。
139.当车辆需要与拖车8分离时,可以分别向第二移动机构22、输送机构4和收纳机构3发送解锁信号;响应于解锁信号,收纳机构3可以通过电机31释放弹性条5,使其回复到初始位置;拖车8的尾板81再次放下;第二移动机构22响应于解锁信号放下第二挡块12,并升起尾板81,使得车辆平稳地下滑。
140.实施方式五
141.本技术的发明人发现,当车辆的采用四轮驱动时,需要对车辆的四个轮胎都进行固定。
142.有鉴于此,本技术的第五实施方式提供了一种车辆自动固定装置。第五实施方式与上述实施方式有所不同,主要不同之处在于,在上述实施方式中,车辆自动固定装置车辆的前轮,而在本技术的第三实施方式中,车辆自动固定装置可以锁固车辆的2个前轮或4个前后轮。
143.具体地:参见图7、图8所示,第一挡块11和第二挡块可以有四组,且与车辆的四个轮胎各自对应设置;
144.获取装置62还用于获取车辆的前后轮的轮距,发出轮距信号;
145.第一移动机构21能够根据轮距信号调整第一挡块11的位置;
146.第二移动机构22能够根据轮距信号调整第二挡块的位置;
147.第二移动机构22响应于定位信号升起四组第二挡块,第一移动机构21响应于定位信号升起至少两组位于同一排的第一挡块11,使车辆的四个轮胎均位于所对应的第一挡块11和第二挡块之间。相较于第一、第二实施方式而言,本技术第二实施方式的车辆自动固定装置不仅可以应用于两轮驱动的车辆,还可以应用于四轮驱动的车辆,通用性更好。另外,当车辆的前后轮均锁固时,具有更好的稳固性。
148.在本实施方式中,四组第一挡块11和第二挡块中,可以有两组位于同一排的第一挡块11固定设置。也就是说,用于阻碍车辆前轮的同一排的第一挡块11固定设置,而用于阻碍车辆后轮的同一排的第一挡块11可伸缩设置,以便于车辆能够顺畅地前进和后退。
149.其中,定位传感器61可以安装在固定设置的第一挡块11上,即接触式传感器。具体地,当车轮接触第一档块时,定位传感器61能够将定位信号(即压力信号)发送给第二移动机构22,从而使得第二挡块12升起,进而将车辆的待锁固轮胎7固定于第一挡块11和第二挡块12之间。
150.或者,定位传感器61也可以安装在任意一组第一挡块11和第二挡块之间的接近式传感器,接近式传感器无需和车辆直接接触,当车辆与定位传感器61接近到设定距离时可以发出定位信号。
151.在本实施方式的一种应用场景中,车辆自动固定装置可以安装在地面,例如停车场、停机坪等,四轮锁固相较于两轮锁固而言可靠性更好。
152.在另一应用场景中,参见图1所示,车辆自动固定装置可以安装在拖车8上,车主操作车辆,借助拖车8上的尾板81驶上斜面,此时靠近拖车8驾驶座的两组第一挡块11升起,远离拖车8驾驶座的两组第一挡块11和四组第二挡块未升起。第一移动机构21和/或第二移动机构22能够根据轮胎尺寸信号调整第一挡块11和/或第二挡块12的位置,以适用于尺寸大小的车辆。
153.在本实施方式中,拖车8可以包括车体和设置在车体上的车辆自动固定装置,其中,车辆自动固定装置的数量可以为4。
154.当前车辆前轮接触靠近拖车8驾驶座的两组第一档块11时,定位传感器61可以发出定位信号,第二移动机构22响应于定位信号升起四组第二挡块,第一移动机构21响应于定位信号升起至少两组位于同一排的第一挡块11,使车辆的四个轮胎均位于所对应的第一挡块11和第二挡块之间。另外,参见图5所示,输送机构4可以响应于定位信号吐出弹性条5,使弹性条5绕待锁固轮胎7运动,直至弹性条5进入收纳机构3所预留的入口内;收纳机构3和输送机构4可以锁定弹性条5以锁固待锁固轮胎7。将车辆与拖车8锁固之后,即可收纳尾板81,通过拖车8上的控制模块82启动拖车8。
155.当车辆需要与拖车8分离时,可以分别向第二移动机构22、输送机构4和收纳机构3发送解锁信号;响应于解锁信号,收纳机构3可以通过电机31释放弹性条5,使其回复到初始位置;拖车8的尾板81再次放下;第二移动机构22响应于解锁信号放下第一挡块11和第二挡块12,并升起尾板81,使得车辆平稳地下滑。
156.实施方式六
157.本技术的发明人发现,存量人工驾驶汽车往往不具备自动驾驶的条件,当自动驾驶车辆广泛使用时,有时候需要将存量的人工驾驶车辆切换至自动驾驶道路上行驶。
158.有鉴于此,本技术提供了一种车辆自动驾驶方法,以便于将不同品牌、不同型号的人工驾驶车辆快速转换成自动驾驶车辆,提高道路运行效率。
159.本实施方式改造普通汽车为自动驾驶汽车的方法,包括如下步骤:
160.响应于车辆到达预设位置的定位信号,升起第二挡块,使车辆的待锁固轮胎7位于第一挡块11和第二挡块之间,预设位置为自动驾驶拖车8的汽车固定位置;
161.吐出弹性条5,使弹性条5绕待锁固轮胎7运动,直至弹性条5进入收纳机构3所预留的入口内;
162.锁定弹性条5以锁固待锁固轮胎7,将车辆固定在自动驾驶拖车8上;
163.由自动驾驶拖车8携带车辆行驶。
164.其中,自动驾驶拖车8,指的是具备了自动驾驶功能的拖车8。将车辆与拖车8绑定之后,即可开启自动驾驶模式:通过拖车8上的自动行驶传感器84(摄像头或雷达)收集行驶周围环境参数并及时上传到自动驾驶控制模块82,通过软件算法实现车辆的控制。
165.本技术借助弹性条5以锁固待锁固轮胎7,使得车辆能够固定在自动驾驶拖车8上。当车主驾驶车辆感到疲劳时,本技术能够将人工驾驶车辆快速转换为自动驾驶车辆。
166.本技术还提供了一种自动驾驶拖车8租赁方法,包括:
167.获取用户上传的租赁地址和目标地址;
168.自动行驶至租赁地址,利用车辆自动固定方法,将目标车辆锁固在自动驾驶拖车8上;
169.自动行驶至目标地址。
170.本实施方式根据所获取的租赁地址自动行驶至租赁地址;利用车辆自动固定方法,将目标车辆锁固在自动驾驶拖车8上,并根据目标地址自动行驶至目标地址,能够实现自动驾驶。无需人工驾驶拖车8至租赁地址,拖车8可以自动行驶至目标地址,提高了智能化水平。
171.实施方式七
172.本技术发明人发现,本技术的车辆自动固定方法及其装置,可以应用在具备了自动驾驶功能的拖车8上。因此,本技术实施方式还提供了一种用于车辆的锁固后自动驾驶方法,包括如下步骤:
173.响应于所述车辆到达预设位置的定位信号,升起第二挡块,使所述车辆的待锁固轮胎7位于第一挡块11和所述第二挡块之间,所述预设位置为自动驾驶拖车8的汽车固定位置;
174.吐出弹性条5,使所述弹性条5绕所述待锁固轮胎7运动,直至所述弹性条5进入收纳机构3所预留的入口内;
175.锁定所述弹性条5以锁固所述待锁固轮胎7,将所述车辆固定在自动驾驶拖车8上;
176.由所述自动驾驶拖车8携带所述车辆行驶。
177.其中,自动驾驶拖车8,指的是具备了自动驾驶功能的拖车8。当人工驾驶车辆感到疲劳,或是进入一些特殊的需要自动驾驶的场地时,借助将本技术的车辆自动固定方法和装置,将车辆固定在自动驾驶拖车8上,可以实现人工驾驶车辆和自动驾驶车辆的切换。
178.对于本领域技术人员而言,显然本技术不限于上述示范性实施例的细节,而且在不背离本技术的精神或基本特征的情况下,能够以其他的具体形式实现本技术。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本技术的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本技术内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1