一种双横臂式减振悬架全地形移动机器人
1.本发明涉及移动机器人技术领域,具体是一种双横臂式减振悬架全地形移动机器人。
背景技术:
2.四轮差速滑动转向全地形独立悬架移动机器人具有结构简单可靠、运行灵活稳定、适应地形广泛、控制简单等优点。尽管现今已开发出性能优异的四轮差速全地形移动机器人,但仍存在一些关键问题亟需解决。
3.1、若全地形移动机器人采用四轮差速滑动转向,转向驱动力矩较大,要求配置传动装置的减速比过大;
4.2.在户外作业发生故障时难以拖动,导致其维修困难;
5.3.现有大多数移动机器人车轮与驱动刚性直连,不利于驱动输出与操控;由于移动机器人悬架方式与车身的匹配适应度不够,以及缺失力矩自平衡分配机构,导致移动机器人车轮输出驱动力矩不均衡,造成车身抖动较大,影响移动机器人行走的平顺性以及传感器测量精度、负载能力等。
6.如中国专利申请号为201711258906.3,提出的双三角形悬架轮腿式全地形移动机器人,具有优良越障、行驶平顺性、主/被动姿态调节功能,但其采用轮毂电机作为驱动轮,力矩较小,负载能力差,转向采用转向电机,使移动机器人本体重量、能耗增加,续航能力减弱,同时移动机器人中电机数量增多,控制难度增加。
7.如中国专利申请号为201811301142.6,提出的一种具有主动独立悬架系统的全地形移动机器人,具有优良越障性能、主动调姿功能、差速转向功能和优良动力学行驶平顺性能,其驱动与车轮刚性直连,缺少力矩分配机构,采用轮毂电机作为驱动电机,虽解决了减速比过大问题,但其力矩输出较小。
8.如中国专利申请号为201911096192.x,提出的一种全地形移动机器人,具有平衡性好,移动效率高,灵活性好,使用领域广等特点,但其使用蜗轮蜗杆电机作为驱动电机且与车轮直连,电机工作环境相对较差,动力传递效率低,采用单纵臂式悬架,悬架方式与车身的匹配适应度不够,行驶平顺性有限。
技术实现要素:
9.为了解决上述问题,本发明提出一种双横臂式减振悬架全地形移动机器人。
10.一种双横臂式减振悬架全地形移动机器人,包括:
11.桁架车身模块;
12.可调双横臂式减振悬架模块,两两一组分布于所述桁架车身模块的两侧以增强移动机器人的车身强度及车身稳定性,适应多地形工况的行走;
13.驱动分档模块,安装在所述桁架车身模块上,能通断自身动力,以完成移动机器人的行驶状态和空档滑行状态的切换;
14.力矩自平衡分配模块,承载于所述桁架车身模块上且被构成为与所述桁架车身模块两侧的同组可调双横臂式减振悬架模块配合,优化分配移动机器人四轮驱动力矩以抑制转向车身侧倾;
15.底层运动控制系统模块,承载于桁架车身模块上且与可调双横臂式减振悬架模块、驱动分档模块、力矩自平衡分配模块配合,用于实现移动机器人的自主导航平顺行走、外部作业工具的搭载及操控。
16.所述的桁架车身模块包括桁架车身、位于桁架车身顶部的减振器上支座固定座、位于桁架车身侧部的减振摆臂安装板、位于桁架车身中间两侧的电池护栏。
17.所述的可调双横臂式减振悬架模块包括上u型摆臂、下u型摆臂,所述的上u型摆臂、下u型摆臂一端铰接有轴承座安装板,所述的上u型摆臂、下u型摆臂远离轴承座安装板的一端与桁架车身模块铰接,所述的上u型摆臂上滑动安装有减振器下支座,所述的减振器下支座上配合有减振器,所述的减振器远离减振器下支座的一端与桁架车身模块配合,所述的上u型摆臂上设有与力矩自平衡分配模块配合的扭杆接头安装铰。
18.所述的驱动分档模块包括孔输出减速器、带轮电磁离合器、分别与孔输出减速器两端连接的减速器安装座和伺服电机、与减速器安装座配合的动力模块安装座、实现驱动与传动隔离的传动模块、用于执行传动模块带来的驱动力的车轮模块,所述轮电磁离合器与孔输出减速器之间设有上带轮轴。
19.所述的传动模块包括角接触球轴承座、与角接触球轴承座配合的外轮毂联轴器、与外轮毂联轴器连接的万向节、与万向节连接的下带轮轴、与下带轮轴配合的深沟球轴承座,所述下带轮轴与上带轮轴之间通过同步带机构传递动力。
20.所述同步带机构包括一组分别对应安装在下带轮轴与上带轮轴上的同步带轮,所述同步带轮之间设有同步带,所述的减速器安装座、动力模块安装座之间设置有张紧螺杆,调节张紧螺杆上的螺母用以张紧同步带。
21.所述的力矩自平衡分配模块包括可控式液压阻尼器、在可控式液压阻尼器两端均有设置的扭杆、与扭杆一端连接且与对应的扭杆接头安装铰铰接的扭杆铰接头、与扭杆滑动配合的法兰衬套、与减振器上支座固定座连接的扭杆压块。
22.所述的底层运动控制系统模块包括外部传感器、底层运动控制器、安装在底层运动控制器上的调度系统、云控制接口、通讯接口。
23.所述的外部传感器包括gps、陀螺仪、激光雷达、双目摄像头、安装在桁架车身底部外侧的rfid传感器、磁导航传感器。
24.所述的底层运动控制器包括电控安装板、控制面板、用以接收外部信号的中央处理器、与中央处理器相连的底盘控制板、用于给中央处理器以及底盘控制板供电的稳压源、与底盘控制板、伺服电机相连的伺服驱动器、断路器、直流接触器。
25.本发明的有益效果是:本发明通过桁架车身模块降低车身重量,提高车身刚度、承载性能、空间利用率;通过可调双横臂式减振悬架模块、驱动分档模块提升车身的减振效果与稳定性,调节车轮外倾角,驱动与传动可隔离,改善动力模块的工作环境,提高输出力矩利用率,解决了移动机器人户外故障时难以拖车的问题;本发明设计的力矩自平衡分配模块有效防止车身侧倾,衰减路面激励带来的振动,根据车轮扭矩实时监测数据,通过控制可控式液压阻尼器的阻尼参数调节力矩自平衡分配模块的刚度,增加扭杆对减振摆臂的推力
以增加车轮对地面的正压力,增大车轮与地面的摩擦力,同时也加快了车轮的回弹速度,缩小两轮之间的力矩差,优化分配移动机器人四轮驱动的力矩,提升转向、自转工况下的负载能力,有效抑制转向过程中车身倾侧,抑制抖动,增强越野性能;本发明通过底层运动控制系统模块拓展了功能性,降低了用户的使用难度,便于二次开发。
附图说明
26.下面结合附图和实施例对本发明进一步说明。
27.图1为本发明的立体结构示意图;
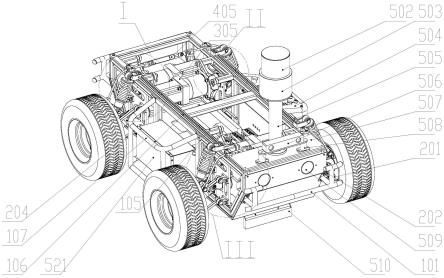
28.图2为本发明去除壳体后的立体结构示意图;
29.图3为本发明的图2的i局部放大立体结构示意图;
30.图4为本发明的图2的ii局部放大立体结构示意图;
31.图5为本发明的图2的iii局部放大立体结构示意图;
32.图6为本发明的整体结构仰视结构示意图;
33.图7为本发明中驱动分档模块结构剖视图;
34.图8为本发明中的驱动分档模块部分立体结构示意图;
35.图9为本发明中底层运动控制系统模块布局图;
36.图10为本发明中底层运动控制系统局部结构示意图;
37.图11为本发明中可调双横臂式减振悬架模块局部结构示意图;
38.图12为本发明中力矩自平衡分配模块局部结构示意图;
39.图13为本发明中驱动分档模块局部立体结构示意图;
40.附图标记:1、桁架车身模块;101、保险杆;102、桁架车身;103、减振摆臂安装板;104、减振器上支座固定座;105、动力模块安装座;106、车顶载物架;107、电池护栏;2、可调双横臂式减振悬架模块;201、减振摆臂下支座;202、可调节摆臂铰接头;203、扭杆接头安装铰;204、下u型摆臂;205、减振摆臂上支座;206、上u型摆臂;207、减振器下支座;208、减振器;209、减振器上支座;210、锁止电动滑轨;3、驱动分档模块;301、上带轮轴;302、张紧螺杆;303、同步带轮;304、同步带;305、孔输出减速器;306、伺服电机;307、减速器安装座;308、电磁离合器;309、万向节;310、深沟球轴承座;311、下带轮轴;312、外轮毂联轴器;313、角接触球轴承座;314、轴承座安装板;315、轮胎;316、轮毂;4、力矩自平衡分配模块;401、扭杆铰接头;402、扭杆;403、法兰衬套;404、扭杆压块;405、可控式液压阻尼器;5、底层运动控制系统模块;501、电控安装板;502、激光雷达;503、gps保护壳;504、控制面板;505、陀螺仪撑杆;506、双目摄像头;507、撑杆底板;508、摄像头支架;509、前大灯;510、磁导航传感器;511、中央处理器;512、底盘控制板;513、稳压源;514、伺服驱动器;515、断路器;516、前大灯支架;517、直流接触器;518、rfid传感器;519、gps;520、陀螺仪;521、电池。
具体实施方式
41.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本发明进一步阐述。
42.如图1至图13所示,一种双横臂式减振悬架全地形移动机器人,包括:
43.桁架车身模块1;
44.可调双横臂式减振悬架模块2,两两一组分布于所述桁架车身模块1的两侧以增强移动机器人的车身强度及车身稳定性,适应多地形工况的行走;
45.驱动分档模块3,安装在所述桁架车身模块1上,能通断自身动力,以完成移动机器人的行驶状态和空档滑行状态的切换;
46.力矩自平衡分配模块4,承载于所述桁架车身模块1上且被构成为与所述桁架车身模块1两侧的同组可调双横臂式减振悬架模块2配合,优化分配移动机器人四轮驱动力矩以抑制转向车身侧倾;
47.底层运动控制系统模块5,承载于桁架车身模块1上且与可调双横臂式减振悬架模块2、驱动分档模块3、力矩自平衡分配模块4配合,用于实现移动机器人的自主导航平顺行走、外部作业工具的搭载及操控。
48.所述的力矩自平衡分配模块4用于优化分配移动机器人四轮驱动的力矩,有效抑制转向过程中车身倾侧和路面激励带来的振动,提升转向、自转工况下的负载能力,增强越野性能。
49.具体的,在本发明中,通过桁架车身模块1降低车身重量,提高车身刚度、承载性能、空间利用率;通过可调双横臂式减振悬架模块2、驱动分档模块3提升车身的减振效果与稳定性,调节车轮外倾角,驱动与传动可隔离,改善动力模块的工作环境,提高输出力矩利用率,解决了移动机器人户外故障时难以拖车的问题;本发明设计的力矩自平衡分配模块4能有效防止车身侧倾,衰减路面激励带来的振动,根据车轮扭矩实时监测数据,通过控制可控式液压阻尼器的阻尼参数调节力矩自平衡分配模块4的刚度,增加扭杆对减振摆臂的推力以增加车轮对地面的正压力,增大车轮与地面的摩擦力,同时也加快了车轮的回弹速度,缩小两轮之间的力矩差,优化分配移动机器人四轮驱动的力矩,提升转向、自转工况下的负载能力,有效抑制转向过程中车身倾侧,抑制抖动,增强越野性能;另外,通过底层运动控制系统模块拓展了功能性,降低了用户的使用难度,便于二次开发。
50.如图2、图5所示,所述的桁架车身模块1包括桁架车身102、位于桁架车身102中间顶部的车顶载物架106、设置在车顶载物架106两端且位于桁架车身102顶部的减振器上支座固定座104、位于桁架车身102前后两端的保险杆101、位于桁架车身102侧部的减振摆臂安装板103、位于桁架车身102中间两侧的电池护栏107。
51.如图2、图3、图5、图11所示,所述的可调双横臂式减振悬架模块2包括减振摆臂下支座201、与减振摆臂下支座201铰接的可调节摆臂铰接头202、与可调节摆臂铰接头202螺纹连接的上u型摆臂206、下u型摆臂204、安装在上u型摆臂206、下u型摆臂204内侧的锁止电动滑轨210、安装在上u型摆臂206、下u型摆臂204u型开口端的减振摆臂上支座205、与减振摆臂下支座201连接的轴承座安装板314、安装在上u型摆臂206上的减振器下支座207、扭杆接头安装铰203。
52.如图1、图2和图11所示,所述的上u型摆臂206、下u型摆臂204一端铰接轴承座安装板314,所述的上u型摆臂206、下u型摆臂204远离轴承座安装板314的一端与桁架车身模块1铰接,所述的上u型摆臂206与减振器下支座207滑动配合,所述的减振器下支座207上配合有减振器208,所述的减振器208远离减振器下支座207的一端与桁架车身模块1配合,所述的上u型摆臂206上设有与力矩自平衡分配模块4配合的扭杆接头安装铰203。
53.所述的上u型摆臂206与力矩自平衡分配模块4为铰接配合。
54.所述的上u型摆臂206、下u型摆臂204的u型封闭端与可调节摆臂铰接头202螺纹连接。
55.具体的,在本发明中,通过旋转可调节摆臂铰接头202调节上u型摆臂206、下u型摆臂204的臂长以调整车轮外倾角来减小移动机器人的转向力;通过调节锁止电动滑轨210来调整摆臂倾角来调节万向节309的工作角,保证输出功率的有效利用,同时在动力充足的情况下,调大摆臂倾角以提高底盘离地高度,提高移动机器人的通过性。
56.基于上述技术,在复杂路面行走时,车轮受到来自地面的激励,其作用力通过车轮模块传递到可调双横臂式减振悬架模块2,经过减振器208,路面激励带来的振动将被有效抑制,桁架车身模块1上所受到的作用力减小,提高了桁架车身模块1的稳定性。
57.如图3所示,所述的减振器下支座207两端分别与锁止电动滑轨210上的滑块连接,所述的减振器上支座固定座104上安装有减振器上支座209,所述的减振器上支座209、减振器下支座207上安装有减振器208。
58.如图2、图4和图8所示,所述的驱动分档模块3包括孔输出减速器305、分别与孔输出减速器305两端连接的减速器安装座307、伺服电机306、与减速器安装座307一端相连并可转动的动力模块安装座105、分布在减速器安装座307外侧的带轮电磁离合器308、安装在桁架车身102的中间两侧的电池521、实现驱动与传动隔离的传动模块、用于执行传动模块带来的驱动力的车轮模块,所述轮电磁离合器308与孔输出减速器305之间设有上带轮轴301。
59.具体的,动力通过伺服电机306传到孔输出减速器305,再传到带轮电磁离合器308,带轮电磁离合器308通过同步带304将动力传递到下带轮轴311,再通过万向节309将动力传递给外轮毂联轴器312,最终传递到车轮上;控制带轮电磁离合器308的离合以断开动力输出,实现移动机器人空档行走。
60.所述的电池521安装在桁架车身102的中间两侧,电池护栏107的内部,电池521与伺服电机306直连供电。
61.如图7所示,所述的传动模块包括安装在轴承座安装板314上的角接触球轴承座313、与角接触球轴承座313配合的外轮毂联轴器312、与外轮毂联轴器312连接的万向节309、一端与万向节309连接的下带轮轴311、与下带轮轴311配合的深沟球轴承座310,所述下带轮轴311与上带轮轴301之间通过同步带机构传递动力;所述的深沟球轴承座310设置有三组,第一组与减振摆臂安装板103相连,第二组与减速器安装座307相连,第三组上配合有上带轮轴301。
62.所述同步带机构包括一组分别对应安装在下带轮轴311与上带轮轴301上的同步带轮303,所述同步带轮303之间设有同步带304,所述的同步带304与带轮电磁离合器308相连,所述的减速器安装座307、动力模块安装座105之间设置有张紧螺杆302,调节张紧螺杆302上的螺母用以张紧同步带304。
63.所述的车轮模块包括轮胎315、设置在轮胎315上的轮毂316。
64.如图5和图12所示,所述的力矩自平衡分配模块4包括可控式液压阻尼器405、在可控式液压阻尼器405两端均有设置的扭杆402、与扭杆402一端连接且与对应的扭杆接头安装铰203铰接的扭杆铰接头401、与扭杆402滑动配合的法兰衬套403、与减振器上支座固定座104连接的扭杆压块404所述的法兰衬套403与减振器上支座固定座104另一端配合。
65.基于上述技术,当车轮模块受到来自地面的冲击力时,车轮模块会弹起,使车轮模块与地面之间的压力减小,摩擦力减小,此时控制面板504上会显示伺服电机306输出电流,则可控式液压阻尼器405的阻尼速度增大,会给车轮模块一个向下的推力以增大摩擦力或使车轮模块快速回弹,实现力矩自动分配同时也增加了移动机器人的操控性。
66.所述的底层运动控制系统模块5包括安装在桁架车身102顶部的外部传感器、安装在桁架车身102底部的底层运动控制器、安装在底层运动控制器上的调度系统、云控制接口、通讯接口。
67.如图2、图9、图10所示,所述的外部传感器包括安装在桁架车身102顶部前端的撑杆底板507、安装在撑杆底板507上的陀螺仪撑杆505、摄像头支架508,设置在陀螺仪撑杆505上的gps519、陀螺仪520、激光雷达502、设置在摄像头支架508上的双目摄像头506、设置在桁架车身102前端的前大灯支架516、安装在前大灯支架516上的前大灯509、安装在桁架车身102底部外侧的rfid传感器518、磁导航传感器510。
68.具体的,所述的陀螺仪520为电子罗盘。
69.具体的,所述的gps519上带有gps保护壳503。
70.如图9和10所示,所述的底层运动控制器包括安装在桁架车身102底部内侧的电控安装板501、安装在电池护栏107上方的控制面板504、设置在电控安装板501上用以接收外部信号的中央处理器511、与中央处理器511相连的底盘控制板512、用于给中央处理器511以及底盘控制板512供电的稳压源513、与底盘控制板512、伺服电机306相连的伺服驱动器514、断路器515、直流接触器517。
71.所述的中央处理器511用以接收外部信号,向底盘控制板512发出指令,底盘控制板512通过控制伺服驱动器514操控伺服电机306达到精确控制移动机器人的目的。
72.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1