用于在自动驾驶系统处检测异常行为的系统和方法与流程
本一般涉及自动驾驶运载工具,更具体地涉及用于在自动驾驶系统处检测恶意运载工具间(v2v)消息的系统和方法
背景技术:
1、自动驾驶运载工具通常配置为从其他自动驾驶运载工具接收运载工具间(v2v)消息。v2v消息包括运载工具标识符和与发送运载工具相关联的运载工具数据。自动驾驶运载工具的自动驾驶系统(ads)通常依赖于从其他自动驾驶运载工具接收的v2v信息中包含的运载工具数据来正确引导和导航自动驾驶运载工具。
2、恶意实体可以通过无线通信信道向自动驾驶运载工具发送看似合法v2v消息的恶意v2v消息。恶意实体可能试图表现为另一个实际上不存在的自动驾驶运载工具。不存在的自动驾驶运载工具可以被为幽灵运载工具(ghost vehicle)。恶意v2v消息可以包括与幽灵运载工具相关联的恶意运载工具数据。
3、自动驾驶运载工具中的ads可能会根据接收到的恶意v2v消息中的恶意运载工具数据来实施一个或多个动作,这些动作可能会降低交通相关的引导效率或者为规避可能导致潜在事故的不存在的幽灵运载工具而实施机动的能力。如果ads能够识别恶意v2v消息以避免使用可能影响ads正确引导和导航自动驾驶运载工具的能力的恶意运载工具数据,这会是有益的。
技术实现思路
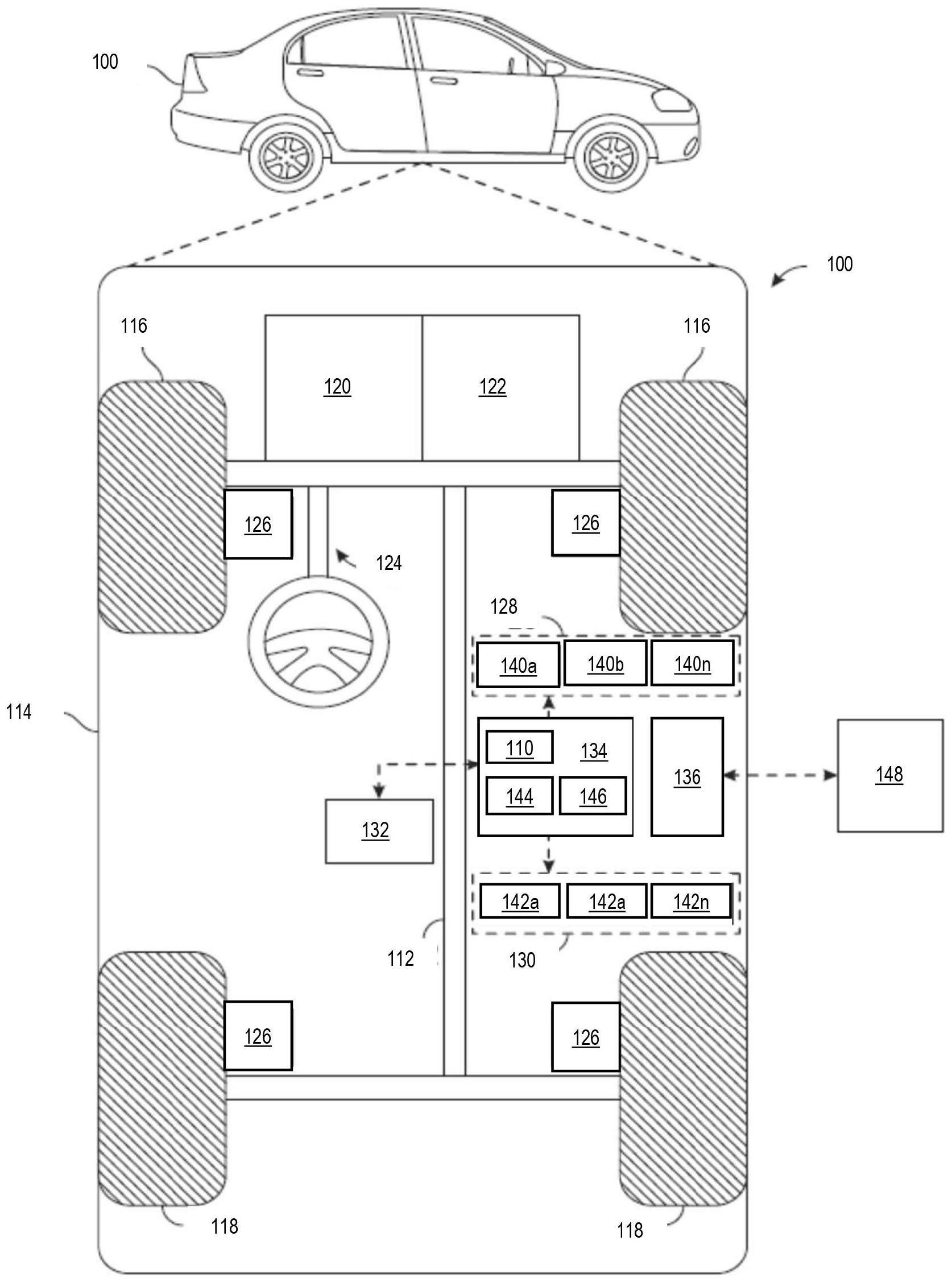
1、在一个实施例中,自动驾驶运载工具的自动驾驶系统(ads)包括异常行为检测系统。该ads包括通信模块、感知模块、异常行为检测模块和处理器。通信模块配置为接收包括基于消息的运载工具数据的运载工具间(v2v)消息。感知模块配置为从至少一个运载工具感测装置接收传感器数据。异常行为检测模块配置为至少部分地根据基于消息的运载工具数据与基于传感器数据生成的基于传感器的运载工具数据的比较来确定v2v消息是合法消息还是恶意消息。处理器配置为基于确定结果根据基于消息的运载工具数据来管理自动驾驶运载工具的性能。
2、在一个实施例中,基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置,并且基于传感器的运载工具数据包括基于传感器数据的源运载工具的基于传感器的运载工具位置。
3、在一个实施例中,异常行为检测模块配置为至少部分地基于执行基于消息的运载工具数据的可信性检查来确定v2v消息是合法消息还是恶意消息。
4、在一个实施例中,基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置,并且异常行为检测模块配置为确定源运载工具的运载工具位置是否处在与至少一个运载工具感测装置相关联的传感器检测区域内,以及基于确定结果执行该至少一个运载工具感测装置的传感器操作检查。
5、在一个实施例中,基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置,并且异常行为检测模块配置为确定源运载工具的运载工具位置是否处在与至少一个运载工具感测装置相关联的传感器检测区域内,以及将在v2v消息中接收的源运载工具的运载工具位置与历史源运载工具位置数据进行比较,以基于确定结果来识别v2v消息是合法消息还是恶意消息。
6、在一个实施例中,基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置,并且异常行为检测模块配置为确定源运载工具的运载工具位置是否处在与至少一个运载工具感测装置相关联的传感器检测区域内,以及将从安全凭证管理系统(scms)接收的且与v2v消息相关的运载工具标识符相关联的信誉分数与信誉分数阈值进行比较,以基于确定结果来识别v2v消息是合法消息还是恶意消息。
7、在一个实施例中,异常行为报告模块配置为,在确定v2v消息是恶意消息时,向scms报告与v2v消息相关联的运载工具标识符。
8、在一个实施例中,一种计算机可读介质,包括存储在其上的用于在自动驾驶系统(ads)处检测异常行为的指令,该指令在由处理器执行时使得处理器接收包括基于消息的运载工具数据的运载工具间(v2v)消息;从至少一个运载工具感测装置接收传感器数据;至少部分地根据基于消息的运载工具数据与基于传感器数据生成的基于传感器的运载工具数据的比较确定v2v消息是合法消息还是恶意消息;以及基于确定结果根据基于消息的运载工具数据管理自动驾驶运载工具的性能。
9、在一个实施例中,该计算机可读介质还包括指令,其用于使处理器至少部分地根据基于消息的运载工具数据与基于传感器数据生成的基于传感器的运载工具数据的比较来确定v2v消息是合法消息还是恶意消息,该基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置,并且该基于传感器的运载工具数据包括基于传感器数据的源运载工具的基于传感器的运载工具位置。
10、在一个实施例中,该计算机可读介质还包括指令,其用于使处理器至少部分地基于执行基于消息的运载工具数据的可信性检查来确定v2v消息是合法消息还是恶意消息。
11、在一个实施例中,该计算机可读介质还包括指令,其用于使处理器确定源运载工具的运载工具位置是否处在与至少一个运载工具感测装置相关联的传感器检测区域内(基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置)以及基于确定结果执行该至少一个运载工具感测装置的传感器操作检查。
12、在一个实施例中,该计算机可读介质还包括指令,其用于使处理器确定源运载工具的运载工具位置是否处在与至少一个运载工具感测装置相关联的传感器检测区域内(基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置)以及将在v2v消息中接收的源运载工具的运载工具位置与历史源运载工具位置数据进行比较以基于确定结果来识别v2v消息是合法消息还是恶意消息。
13、在一个实施例中,该计算机可读介质还包括指令,其用于使处理器确定源运载工具的运载工具位置是否处在与至少一个运载工具感测装置相关联的传感器检测区域内(基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置)以及将从安全凭证管理系统(scms)接收的且与v2v消息相关的运载工具标识符相关联的信誉分数与信誉分数阈值进行比较以基于确定结果来识别v2v消息是合法消息还是恶意消息。
14、在一个实施例中,该计算机可读介质还包括指令,其用于使处理器在确定了v2v消息是恶意消息时向scms报告与v2v消息相关联的运载工具标识符。
15、在一个实施例中,一种在自动驾驶系统(ads)处检测异常行为的方法包括:在通信模块处接收包括基于消息的运载工具数据的运载工具间(v2v)消息;在感知模块处接收从至少一个运载工具感测装置接收的传感器数据;在异常行为检测模块处至少部分地根据基于消息的运载工具数据与基于传感器数据生成的基于传感器的运载工具数据的比较来确定v2v消息是合法消息还是恶意消息;以及基于确定结果根据基于消息的运载工具数据管理自动驾驶运载工具的性能。
16、在一个实施例中,该方法还包括:至少部分地根据基于消息的运载工具数据与基于传感器数据生成的基于传感器的运载工具数据的比较来确定v2v消息是合法消息还是恶意消息,该基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置,并且该基于传感器的运载工具数据包括基于传感器数据的源运载工具的基于传感器的运载工具位置。
17、在一个实施例中,该方法还包括:至少部分地基于执行基于消息的运载工具数据的可信性检查来确定v2v消息是合法消息还是恶意消息。
18、在一个实施例中,该方法还包括:确定源运载工具的运载工具位置是否处在与至少一个运载工具感测装置相关联的传感器检测区域内(基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置);以及基于确定结果执行该至少一个运载工具感测装置的传感器操作检查。
19、在一个实施例中,该方法还包括:确定源运载工具的运载工具位置是否处在与至少一个运载工具感测装置相关联的传感器检测区域内(基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置);以及将在v2v消息中接收的源运载工具的运载工具位置与历史源运载工具位置数据进行比较以基于确定结果来识别v2v消息是合法消息还是恶意消息。
20、在一个实施例中,该方法还包括:确定源运载工具的运载工具位置是否处在与至少一个运载工具感测装置相关联的传感器检测区域内(基于消息的运载工具数据包括v2v消息的源运载工具的运载工具位置);以及将从安全凭证管理系统(scms)接收的且与v2v消息相关的运载工具标识符相关联的信誉分数与信誉分数阈值进行比较以基于确定结果来识别v2v消息是合法消息还是恶意消息。
- 还没有人留言评论。精彩留言会获得点赞!