一种基于OpenMV的车辆自动充电方法及系统
一种基于openmv的车辆自动充电方法及系统
技术领域
1.本发明涉及汽车车辆充电技术领域,具体涉及一种基于openmv的车辆自动充电方法及系统。
背景技术:
2.随着我国经济的高速发展,人们的生活水平不断提高,汽车开始进入千家万户,越来越普及。与此同时,大力推展新能源发展,越来越多的新能源汽车出现在市场中。由于新能源汽车的急速发展,充电桩还未得到全铺展。车主在充电过程中的问题也相继露出。普通充电桩的充电时长较长,而且充电枪在和车上的接口多次插拔后,彼此的间隙越来越大,从而产生放电,导致充电枪被烧的故障,发生此类事故,则必须更换充电枪,维修成本高;另一方面每次充电操作都需要人工操作,当充电枪相关配件因器件老化或者安全措施不到位,充电枪头也会带电,在使用过程中,容易发生触电安全事故。
3.中国专利(申请号为:201410840567.x)种自动充电机器人的定位方法,,对待充电车辆进行拍照;对照片信息进行图像处理,获取实际特征值;调取标准特征值,将所述实际特征值与所述标准特征值进行对比分析,得出控制偏差;调取标准控制参数,根据所述标准控制参数与所述控制偏差,得出实际控制参数;根据实际控制参数完成对所述充电机器人的定位控制之后,打开充电插座阀门,对充电插座进行拍照,将所述充电插座照片进行图像处理,进行第二次定位微调,达到定位精度。对充电插座进行定位时,需要进行二次定位,不能一次精装定位,操作麻烦,浪费时间。
技术实现要素:
4.本发明针对上述的不足之处提供一种操作简单,节约成本、时间和安全系数高的基于openmv的车辆自动充电方法及系统及装置。
5.本发明目的是这样实现的:一种基于openmv的车辆自动充电方法:
6.步骤1:将提前录入好的车辆图片通过神经网络算法对openmv视觉识别模块进行训练,根据训练好的模块建立模型;
7.步骤2:将车辆停靠在指定的位置,通过上位机端选择充值金额并进行支付;
8.步骤3:支付好后,采用openmv视觉识别模块对当前车辆进行拍照,获取到的照片与事先录入的照片进行对比,判断出当前车辆类型;
9.步骤4:车辆匹配后,获取当前车辆充电孔大区域;
10.步骤5:获取的大区域通过sift算法划分子区域,精准计算出充电孔的坐标点位;
11.步骤6:使用距离算法计算出当前车辆与机械臂的距离,判断选取参照物的大小,计算参照物与机械臂的距离;
12.步骤7:将计算得到的距离和坐标信息发送到控制端,控制端根据收到的信息控制机械臂移动到充电枪;
13.步骤8:机械臂根据控制端指令将充电枪移动到充电孔位置,进行自动充电。
14.优选的,所述sift算法根据图片定位获取位置信息、尺度信息和方向信息,将三个信息组组成关键点,为每个关键点建立一个描述符,再通过一组的向量将这个关键点描绘出来,让它不再随着各种的变化而改变。
15.一种基于openmv的车辆自动充电系统,其特征在于,该系统包括服务器、充电枪、openmv视觉识别模块、机械臂和上位机微信小程序;所述服务器、openmv视觉识别模块、机械臂和上位机微信小程序通过公共网络建立通信连接;
16.所述openmv视觉识别模块设置在充电枪上;
17.所述服务器包括控制端和训练好的模型。
18.所述系统还包括底座、充电线缆以及变压器;所述底座上面连接支撑柱,所述支撑柱上方连接有机械臂;机械臂上方连接有充电枪,充电枪上连接有摄像头;所述充电枪上连接有充电线缆;所述摄像头置于充电枪下方;所述底座上设有变压器,变压器设于支撑柱侧面。
19.优选的,所述充电枪上还设置有温度检测模块、电流检测模块、气体检测传感器、火焰检测传感器和预警警报模块;
20.所述温度检测模块,在充电中检测充电口温度;
21.所述电流检测模块,进行充电电流检测;
22.所述气体检测传感器,可以检测到浓烟气体;
23.所述火焰检测传感器探测火源或其它一些波长在700纳米~1000纳米范围内的热源;
24.所述预警警报模块,进行警报提醒。
25.优选的,所述机械臂采用三自由度舵机。采用三自由度舵机可以最大限度的模仿人类的手臂,实现上下、左右、前后的一系列灵活操作。
26.优选的,所述预警警报模块采用声光报警器。通过声音报警和光报警结合,可快速帮助操作人员对充电情况以及充电枪情况的了解。
27.本发明的有益效果:1、通过服务器、openmv视觉识别模块、机械臂和上位机微信小程序有效结合,再不需要人为的操作下,可自行完成车辆充电,减少安全事故的发生,并且减少充电枪与充电孔之间多次插拔,避免充电枪的损坏,节约成本。
28.2、通过使用sift算法可快速对图像进行处理,有效对特征信息进行获取,处理时间快,节约时间,增加效率。
29.3、通过充电枪上设置的温度检测模块、电流检测模块、气体检测传感器、火焰检测传感器和预警警报模块,可快速对充电枪的状态进行全面了解,当发生意外时,控制端可迅速进行处理,降低安全隐患。
附图说明
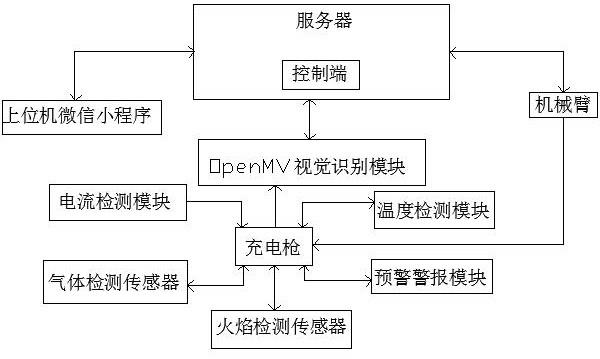
30.图1为本发明的系统结构图。
31.图2为该发明的结构示意图。
32.图3为距离计算实示例图。
33.其中,1为充电枪;2为摄像头;3为机械臂;4为底座;5为支撑柱。
具体实施方式
34.以下结合附图对本发明做进一步概况。
35.一种基于openmv的车辆自动充电方法:
36.步骤1:将提前录入好的车辆图片通过神经网络算法对openmv视觉识别模块进行训练,根据训练好的模块建立模型;
37.步骤2:将车辆停靠在指定的位置,通过上位机端选择充值金额并进行支付;
38.步骤3:支付好后,采用openmv视觉识别模块对当前车辆进行拍照,获取到的照片与事先录入的照片进行对比,判断出当前车辆类型;
39.步骤4:车辆匹配后,获取当前车辆充电孔大区域;
40.步骤5:获取的大区域通过sift算法划分子区域,精准计算出充电孔的坐标点位;
41.步骤6:使用距离算法计算出当前车辆与机械臂3的距离,判断选取参照物的大小,计算参照物与机械臂3的距离;
42.步骤7:将计算得到的距离和坐标信息发送到控制端,控制端根据收到的信息控制机械臂3移动到充电枪1;
43.步骤8:机械臂3根据控制端指令将充电枪1移动到充电孔位置,进行自动充电。
44.进一步,sift算法根据图片定位获取位置信息、尺度信息和方向信息,将三个信息组组成关键点,在为每个关键点建立一个描述符,再通过一组的向量将这个关键点描绘出来,让它不再随着各种的变化而改变。这个描述不但包括关键点,也包括了关键点周围的相似像素点,使得描述符拥有较高的独特性。图像比对公式如下:将关键点周围区域划分为d*d(d=4)的子区域,每个子区域作为一个种子点,每个种子点有8个方向,使得每个区域有3σ_oct个像素(在本项目中约为80个像素)再根据图像大小和旋转的因素得出图像区域半径计算公式为:将坐标轴以关键点的方向旋转,获得在旋转后相邻域内采用点的坐标:将相邻域内的采样点分别配对其对应的区域内,计算影响子区域的参与度的梯度和方向。旋转后(x
′
,y
′
)的下标为梯度计算公式为:
45.最后统计图片共128个梯度信息h=(h1,h2,h3.......h128)作为关键点的特征向量,公式为:
46.其中,j为对应像素点数,h作为关键点的特征向量,x、y为特征位置,x’、y’为旋转后特征的位置,σ为高斯函数标准差参数,m为排序后的中间值。
47.进一步,如图1所示,一种基于openmv的电动车充电孔定位识别系统,该系统包括服务器、充电枪1、openmv视觉识别模块、机械臂3和上位机微信小程序;所述服务器、openmv视觉识别模块、机械臂3和上位机微信小程序通过公共网络建立通信连接;openmv视觉识别模块设置在充电枪1上,服务器包括控制端和训练好的模型。
48.进一步,充电枪1上还设置有温度检测模块、电流检测模块、气体检测传感器、火焰检测传感器和预警警报模块;温度检测模块使用ds18b20传感器,在充电中检测充电口温
度;电流检测模块使用acs712elctr芯片,进行充电电流检测;气体检测传感器采用mq-2半导体烟雾传感器,可以检测到浓烟气体;火焰检测传感器探测火源或其它一些波长在700纳米~1000纳米范围内的热源;预警警报模块采用声光报警器是当控制端接受到报警信号后,发出警报。
49.进一步,该系统还底座4、摄像头2,充电线缆以及变压器;底座4上面连接支撑柱5,支撑柱5上方连接有机械臂3;机械臂3上方连接有充电枪1,充电枪1上连接有充电线缆;充电枪1上连接有摄像头2;摄像头2设置于充电枪1下方;所述底座4上设有变压器,变压器设于支撑柱5侧面。
50.进一步,如图2所示,机械臂3采用三自由度舵机,可以最大限度的模仿人类的手臂,实现上下、左右、前后的一系列灵活操作。
51.工作原理:一种基于openmv的车辆自动充电系统,系统中服务器包含控制端和训练好的模型,控制端对输入输出的信号进行采集和处理,充电枪1、openmv视觉识别模块、机械臂3和上位机微信小程序受控于控制端;服务器内训练好的模型采用神经网络算法,对提前录入好的车辆图片进行训练,并建立模型;上位机微信小程序作为移动应用,使用中产生的数据都被存储在服务器中,控制端进行控制;使用ai-thinker软件配置wi-fi模块连接无线网络,使模块具有上网功能,连接到我们搭建好的网络服务器进行数据收发通信;当将车辆停靠在指定的位置后,上位机端选择充值金额并进行支付;此时,采用openmv视觉识别模块对当前车辆进行拍照,获取到的照片与事先录入的照片进行对比,判断当前车辆类型;openmv视觉识别模块主要应用的是颜色识别和测距功能,openmv是一个可进行代码编程的摄像头2,通过micropython脚本语言即可进行逻辑编程;摄像头2本身也内置了一些图像处理算法,更加容易上手开发,只需要一些简单的micropython代码就可以开发出视觉相关任务,采用sift算法作为本发明的图像处理算法。通过sift算法精准计算出充电孔的坐标点位后,使用距离算法计算当前车辆与机械臂3的距离,判断选取参照物的大小,计算出参照物与机械臂3的距离;本发明采用的测距方法是是判断选取参照物的大小计算物体距离,通过选取参照物方式实现测距。如图3所示,距离计算使用到的是数学中的几何问题,通过摄像头2中的集合关系可以得出:
[0052][0053][0054]
联立公式(4-1)、(4-2)得出:
[0055][0056]
再由右边真实环境几何关系可以得出:
[0057][0058]
带入(1)式中,简化公式即可得出:
[0059][0060]
公式中在等号左边lm是实际距离,bipx摄像头2中所占的像素(直径像素),等号右
边rm是球在现实中的半径,apix是固定像素,l为焦距,a是视角的一半。实际长度和摄像头2里的像素成反比,距离=一个常数/直径的像素。
[0061]
进一步,将计算得到的距离和坐标信息发送到控制端,控制端根据收到的信息控制机械臂3移动到充电枪1;机械臂3根据控制端指令将充电枪1移动到充电孔位置,进行自动充电。充电枪1上的设置的温度检测模块、电流检测模块、气体检测传感器、火焰检测传感器和预警警报模块可随时将充电枪1的情况发送到控制端,控制端可通过上位机微信小程序反应给用户。
[0062]
以上所述仅为本发明的实施方式而已,并不用于限制本发明。对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原理的内所作的任何修改、等同替换、改进等,均应包括在本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1