应用于车库的智能充电系统和方法与流程
1.本公开涉及充电设备领域,尤其是一种应用于车库的智能充电系统和方法。
背景技术:
2.本部分的陈述仅仅是提供了与本公开公开相关的背景技术信息,不必然构成在先技术。
3.目前,现有的车库通过在停车位附近设立充电桩以为车辆提供充电服务,因此,需要在每个车位附件均设置一个充电桩,导致充电设备的成本较高。而且,在车辆需要充电时,车辆需先停放在设有充电设备的车位上,然后由工作人员将充电枪插入车辆的充电插口内,待车辆充电完毕或客户取车时,工作人员需再次到达该车位,拔下充电枪,停止充电,整个过程中,对工作人员协助度的要求比较高,在占地面积较大的地面停车场上尤其费时费力,操作不便。
技术实现要素:
4.鉴于以上内容,有必要提供一种应用于车库的智能充电系统和方法,可以为多个停车位的提供充电功能。
5.为此,本公开首先提供了一种应用于车库的智能充电系统,包括:
6.充电机构,包括机械臂和充电插头,所述充电插头连接于所述机械臂,用于对接车辆的充电口;
7.子车,连接于所述机械臂,用于负载所述机械臂沿纵向方向移动;
8.母车,连接于所述子车,用于负载所述子车沿横向方向移动。
9.优选地,还包括轨道,所述子车和母车移动地连接所述轨道。
10.优选地,所述子车还包括锁车机构,所述锁车机构包括:
11.连接轴,连接于所述子车或母车;
12.锁车板,连接于所述连接轴,用于在所述连接轴的牵引下移动直至压紧所述轨道。
13.优选地,所述轨道包括导向槽,所述导向槽用于在所述子车或母车移动至所述轨道时,所述连接轴牵引所述锁车板移动至夹紧所述导向槽以锁止所述子车或者母车。
14.优选地,所述锁车板为轮体,并且转动地连接于所述连接轴,所述锁车板用于在所述子车或者母车移动于所述轨道时,所述锁车板的旋转面抵接所述导向槽的侧面以导引所述子车或者母车,或者在所述连接轴的牵引下,抵接所述导向槽以锁止所述子车或者母车。
15.优选地,所述连接轴螺纹连接所述锁车板,用于通过转动牵引所述锁车板沿所述连接轴的轴向方向移动。
16.优选地,所述锁车板沿所述导向槽的长度方向延伸,用于在所述连接轴转动时抵接所述导向槽以在所述连接轴的牵引下沿所述连接轴的轴向方向移动。
17.优选地,所述锁车机构包括至少一对通过螺纹连接于所述锁车板的连接轴。
18.优选地,所述子车或母车还包括导向轮,所述导向轮转动地连接于所述连接轴并
且旋转面抵接所述轨道。
19.此外,本公开还提供了一种应用于车库的智能充电方法,适用于上述智能充电系统,包括以下步骤:
20.在母车沿横向方向移动至预设位置时,位于所述母车的子车沿纵向方向驶离所述母车;
21.在所述子车移动至预设位置时,连接于所述子车的机械臂移动充电插头插接于车辆的充电口;
22.连接所述母车和子车的电缆为所述充电插头供电以向所述车辆充电。
23.相较于现有技术,上述的应用于车库的智能充电系统和方法通过母车负载子车沿横向方向移动,子车脱离母车后负载充电机构沿纵向方向移动,直至子车移动到预设位置后,充电机构的机械臂移动充电插头为车辆进行充电,这样,设置一套设备即可为母车和子车移动范围内的停车位的车辆提供充电功能,从而有效降低了充电设备的成本。
附图说明
24.为了更清楚地说明具体实施方式,下面将对实施方式描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
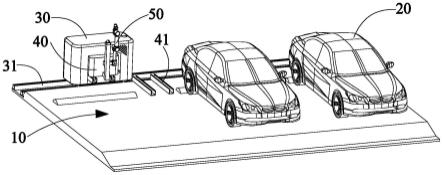
25.图1是应用于车库的智能充电系统的结构示意图。
26.图2是母车和子车的结构示意图。
27.图3是母车的结构示意图。
28.图4是子车的结构示意图。
29.图5是锁车机构和导向轮的结构示意图。
30.图6是锁车机构在锁车状态下的结构示意图。
31.图7是锁车机构在另一实施方式下的结构示意图。
32.图8是锁车机构在又一实施方式下的结构示意图。
33.图9是锁车板和纵向轨道的结构示意图。
34.主要元件符号说明
[0035][0036][0037]
如下具体实施方式将结合上述附图进一步说明本公开。
具体实施方式
[0038]
为了能够更清楚地理解本公开的上述目的、特征和优点,下面结合附图和具体实施方式对本公开进行详细描述。需要说明的是,在不冲突的情况下,本技术的实施方式及实施方式中的特征可以相互组合。在下面的描述中阐述了很多具体细节以便于充分理解本公开,所描述的实施方式仅仅是本公开一部分实施方式,而不是全部的实施方式。基于本公开中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本公开保护的范围。
[0039]
除非另有定义,本文所使用的所有的技术和科学术语与属于本公开的技术领域的技术人员通常理解的含义相同。本文中在说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本公开。
[0040]
在各实施例中,为了便于描述而非限制本公开,本公开专利申请说明书以及权利要求书中使用的术语"连接"并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。"上"、"下"、"下方"、"左"、"右"等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也相应地改变。
[0041]
图1是应用于车库的智能充电系统的结构示意图。如图1所示,应用于车库的智能充电系统包括母车30、子车40、充电机构50和用于承载母车30和子车40的轨道。母车30用于承载子车40和充电机构50沿横向方向移动,子车40用于承载充电机构50沿纵向方向移动,实现整个系统沿纵向方向和横向方向移动的功能。充电机构50用于对接车辆20,为车辆20提供充电服务。这样,该应用于车库的智能充电系统在现有车库的基础上,为预设范围内的停车位10提供充电服务。在车辆20停靠于该范围内的停车位10后,智能充电系统可以在接收到指令后,自动为车辆20进行充电。
[0042]
本实施方式中,轨道包括纵向轨道41和横向轨道31。纵向轨道41和横向轨道31可以设置于车库的地面,也可以设置于车库的顶板,本领域技术人员可以根据需要设置纵向轨道 41和横向轨道31的位置,用于导引和承载母车30和子车40移动。具体的,本实施方式中,所述纵向轨道41沿纵向方向延伸,所述横向轨道31沿所述横向方向延伸,子车40移动地连接于纵向轨道41,母车30移动地连接于所述横向轨道31。这样,子车40可以沿纵向轨道41移动,而母车30沿横向轨道31移动。本实施方式中,所述纵向方向沿所述车辆20的长度方向延伸,所述横向方向沿所述车辆20的宽度方向延伸,纵向方向垂直于横向方向。例如纵向方向可以是水平面内的x轴方向,横向方向可以是水平面内的y轴方向。然而,在另外一些实施方式中,纵向方向和横向方向之间也可以是其他角度或者母车30和子车40 的移动方向也可以是弧形,本领域技术人员也可以根据停车位10的配置方向和范围,合理设置纵向方向和横向方向,使得充电机构50能够被母车30和子车40移动至预设的停车位 10进行充电动作。
[0043]
图2是母车30和子车40的结构示意图,图3是母车30的结构示意图。如图2和图3 所示,母车30大体呈长方体结构,用于负载所述子车40沿横向方向移动。在母车30沿纵向轨道41行驶过程中,子车40和充电机构50位于母车30内。母车30可以通过电缆与电源连接,或者,在一些实施方式中,母车30也可以承载若干大容量的电池包,从而可以为母车30提供电源。母车30和子车40之间通过电缆连接,在子车40驶离母车30的过程中,子车40可以拽拖电缆沿纵向轨道41移动,通过连接于母车30的电缆为子车40供电。
[0044]
母车30大体呈立体块状结构,壳体内部具有一容腔32,底部设有若干个第一行走轮33。所述容腔32朝向纵向方向具有一孔,容腔32用于收容所述子车40,子车40经该孔进入或者驶离所述容腔。为了便于子车40的移动,所述容腔32的底部设有连接轨道321,所述子车40移动地位于该连接轨道321上,并且可以被收容于该容腔32内。在需要驶离母车30 时,连接轨道321对接于纵向轨道41,子车40可以经连接轨道321移动至纵向轨道41,即从该容腔32内移出。第一行走轮33的旋转面与横向轨道31接触,用于沿横向轨道31行走。在另外一些实施方式中,母车30也可以通过滑块-滑轨结构实现沿横向方向滑行,本技术对此不作限制。
[0045]
本实施方式中,母车30还连接一锁车机构,用于将母车30锁止于横向轨道31。在母车 30沿横向轨道31移动至预设位置后,为了防止母车30滑动,可以通过锁车结构锁止于横
向轨道31。在需要母车30移动时,锁止机构解锁,母车30得以沿横向轨道31移动。锁车机构包括锁车板60和连接轴61,其具体结构和工作过程在后述中详细描述。
[0046]
图4是子车40的结构示意图。如图4所示,子车40连接于所述机械臂52,用于负载所述机械臂52沿纵向方向移动。具体的,类似于母车30结构,子车40的底部转动地设有多个第二行走轮42,第二行走轮42的旋转面与连接轨道321或纵向轨道41接触,用于沿纵向轨道41行走。在另外一些实施方式中,子车40也可以通过滑块-滑轨结构实现沿纵向方向移动,本技术对此不作限制。
[0047]
充电机构50包括摄像头511、机械臂52和充电插头53。摄像头511通过连接柱51连接于子车40,用于通过视觉方法确定车辆20的充电口的位置,这样,机械臂52可以根据摄像头511确定的位置将充电插头53插接于车辆20的充电口。在一些实施方式中,摄像头511 还可以通过云台连接于连接柱51,用于自动寻找车辆20的充电口。机械臂52可以是四自由度或者具有其他自由度的机械臂52,一端连接于连接柱51,外端(即自由端)连接于充电插头53。这样,所述充电插头53可以在机械臂52的牵引下调整位置和姿态,以便于对接车辆20的充电口为车辆20进行充电。
[0048]
由于子车40的机械臂52在插拔充电插头53的过程中,需要施加加大的作用力,为了防止子车40在插拔充电插头53的过程中移动,需要通过锁车机构锁定子车40,防止子车 40在插拔过程中移动而影响充电插头53的插拔动作。以下以子车40的锁车机构为例,详细描述该锁车结构的结构和动作。本领域技术人员理解,母车30也可以设置类似的锁车机构锁止于横向轨道31,此处不再赘述。
[0049]
图5是锁车机构和导向轮34的结构示意图,图6是锁车机构在锁车状态下的结构示意图。如图5和图6所示,所述锁车机构包括连接轴61、锁车板60和电机612。所述连接轴 61连接于所述子车40和锁车板60,用于牵引所述锁车板60移动以抵接纵向轨道41,防止子车40沿纵向轨道41移动而实现锁车功能。具体的,本实施方式中,电机612连接于子车 40,通过输出轴611连接于所述连接轴61。连接轴61的旋转面设有螺纹,通过该螺纹连接所述锁车板60。本实施方式中,锁车板60螺纹连接一对或者更多的连接轴61,可以防止锁车板60跟随连接轴61转动,这样,在连接轴61转动时,可以牵引锁车板60沿连接轴61 的轴向方向移动。在需要锁止的时候,电机612通过输出轴611带动连接轴61转动,连接轴61转动带动锁止杆沿连接轴61的轴向方向移动,使得锁车板60压紧纵向轨道41,实现锁止的作用。在需要解锁的时候,电机612带动连接轴61反向转动,锁车板60沿连接轴61 的轴向方向反向移动,使得锁车板60脱离于纵向轨道41接触,完成解锁的功能。
[0050]
在一些实施方式中,纵向轨道41可以包括导向槽,导向槽可以是燕尾槽结构,第二行走轮42与导向槽的底壁接触,实现沿纵向轨道41移动。例如纵向轨道41全部可以是导向槽,也可以是特定的一段设置为导向槽,也可以在正常的轨道之外,另设一段导向槽,本领域技术人员可以根据需要设置导向槽的结构。连接轴61向下延伸并且下端伸入导向槽内,锁车板60连接于连接轴61并且位于导向槽内。连接轴61可以牵引锁车板60沿竖直方向上下移动,当连接轴61牵引锁车板60向上移动至于导向槽的顶壁接触并压紧导向槽的顶壁完成锁止动作。当连接轴61牵引锁车板60向下移动脱离导向槽的顶壁,完成解锁动作。
[0051]
为了导引子车40沿纵向轨道41移动,在一些实施方式中,子车40还可以包括导向轮 34。导向轮34可以通过轴承转动地连接于连接轴61的底端,并且旋转面朝向导向槽的侧
壁,用于导引子车40沿导向槽移动。
[0052]
图7是锁车机构在另一实施方式下的结构示意图。如图7所示,在另外一实施方式中,锁车机构的锁车板60同时兼具导向功能。具体的,锁车板60大体呈轮体结构,转动地连接于连接轴61,连接轴61可以通过其他方式牵引锁车板60沿竖直方向移动。在解锁状态下,锁车板60的旋转面可以抵接导向槽的侧壁,实现导引作用;在需要锁止子车40时,连接轴 61牵引锁车板60向上移动,使得锁车板60的顶面(即上端面)抵接导向槽的顶壁并且压紧导向槽的顶壁,实现锁止的功能。然而,本领域技术人员理解,连接轴61也可以驱动锁车板60向下移动,压紧于导向槽的底壁,实现锁止功能,此处不再赘述。
[0053]
图8是锁车机构在又一实施方式下的结构示意图,图9是锁车板60和纵向轨道41的结构示意图。本实施方式的锁车机构与图5示出的实施方式不同之处在于,本实施方式提供的锁车机构的锁车板60仅通过单一的连接轴61连接。为了防止锁车板60跟随连接轴61转动,锁车板60可以沿导向槽的长度方向延伸,例如可以是长方形板状结构或者椭圆形板状结构,这样可以通过纵向轨道41的导向槽的侧壁卡住锁车板60,防止锁车板60跟随连接轴61转动。
[0054]
以下详细描述基于上述智能充电系统实现的应用于车库的智能充电方法,该应用于车库的智能充电方法适用于上述智能充电系统。
[0055]
首先,用户可以通过手机app等方式输入需要充电的车辆20信息,智能充电系统得以根据车辆20信息确定车辆20停靠的停车位10。
[0056]
然后,智能充电系统控制母车30沿横向方向移动至预设位置,该预设位置可以根据每个停车位10的位置信息预先设置。在母车30移动至预设位置后,锁车机构的连接轴61转动,带动锁车板60沿竖直方向上移,直至锁车板60压紧横向轨道31的顶壁,实现锁止母车30、防止母车30移动的作用。
[0057]
接着,位于所述母车30的子车40沿纵向方向驶离所述母车30,拖着电缆沿靠近车辆 20的充电口的方向移动。
[0058]
然后,在所述子车40移动至预设位置时,摄像头511移动并寻找车辆20的充电口的位置信息,连接于所述子车40的机械臂52根据该位置信息,移动充电插头53插接于车辆20 的充电口。在摄像头511寻找充电口的位置信息时,子车40可以配合摄像头511沿纵向方向微调移动,以便于摄像头511确定充电口的具体位置。在子车40移动至合适的位置后,电机612驱动连接轴61转动,带动锁车板60上移直至锁车板60压紧纵向轨道41的顶壁,实现锁止子车40、防止子车40移动的作用。
[0059]
接着,连接所述母车30和子车40的电缆为所述充电插头53供电以向所述车辆20充电。
[0060]
在完成充电后,机械臂52移动充电插头53从充电口拔出并复位至初始位置,锁车机构的连接轴61转动使得锁车板60脱离纵向轨道41,完成解锁动作,然后子车40沿纵向轨道 41移动至连接轨道321,返回母车30的容腔32内。接着母车30的锁车机构解除锁止状态,负载子车40和充电机构50沿横向轨道31返回至初始位置或者前往其他停车位10实施下一次充电操作。
[0061]
上述的应用于车库的智能充电系统和方法通过母车30负载子车40沿横向方向移动,子车40脱离母车30后负载充电机构50沿纵向方向移动,直至子车40移动到预设位置后,
充电机构50的机械臂52移动充电插头53为车辆20进行充电,这样,设置一套设备即可为母车30和子车40移动范围内的停车位10的车辆20提供充电功能,从而有效降低了充电设备的成本。
[0062]
在本公开所提供的几个具体实施方式中,对于本领域技术人员而言,显然本公开不限于上述示范性实施例的细节,而且在不背离本公开的精神或基本特征的情况下,能够以其他的具体形式实现本公开。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本公开的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本公开内。此外,显然“包括”一词不排除其他单元或步骤,单数不排除复数。第一,第二等词语用来表示名称,而并不表示任何特定的顺序。
[0063]
以上实施方式仅用以说明本公开的技术方案而非限制,尽管参照以上较佳实施方式对本公开进行了详细说明,本领域的普通技术人员应当理解,可以对本公开的技术方案进行修改或等同替换都不应脱离本公开的技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1