一种用于自动驾驶的速度控制方法及存储介质与流程
1.本发明属于自动驾驶的技术领域,具体涉及一种用于自动驾驶的速度控制方法及存储介质。
背景技术:
2.随着汽车智能化的快速发展,越来越多的车辆上都搭载了自动驾驶系统。在自动驾驶过程中,自动驾驶系统根据本车的运动状态和周围环境情况对本车速度进行自动控制,对车速的控制一般根据有无目标车分为跟车速度控制策略和巡航速度控制策略。自动驾驶系统根据前车的运动趋势状态进行目标车选择和释放,在选择目标车之前,本车执行巡航速度控制策略;在选择目标车后,本车执行跟车速度控制策略。
3.跟车速度控制策略一般为根据目标车的车速和本车设定的巡航速度相比较;若目标车的车速大于本车设定的巡航速度,则本车按照标定的加速曲线加速至设定的巡航速度后巡航行驶;若目标车的车速小于本车设定的巡航速度,则本车以目标车的车速行驶并实时检测本车与目标车的纵向时距,若实际时距小于设定时距,则适当减速以拉开时距;若实际时距大于设定时距,则适当加速以减小实际时距,最终控制本车跟随目标车以设定时距等速行驶。巡航速度控制策略一般为实时比较本车的当前车速和设定的巡航速度,若当前车速低于设定的巡航速度,则根据标定量进行加速以趋近设定的巡航速度;若当前车速高于设定的巡航速度,则根据标定量进行减速以趋近设定的巡航速度。
4.但在实际应用场景中,目前的自动驾驶系统存在如下问题:当前车为大型车辆时,如大货车和轿运车等,由于车宽较大,其轮胎边缘往往非常靠近车道线,容易导致系统误判,在相邻车道的前车未有变道趋势的前提下选择前侧为目标车,从而进行跟车行驶,导致用户抱怨;在未误选相邻车道的前车为目标车时,本车完全按照设定的巡航速度超越相邻车道的前车,若相对速度较大,则会产生较强的压迫感,使本车驾驶员和乘客感到恐慌,导致自动驾驶的安全性和舒适性较差。
技术实现要素:
5.针对现有技术的上述不足,本发明要解决的技术问题是提供一种用于自动驾驶的速度控制方法及存储介质,解决目前自动驾驶难以在前车为大型车辆的情况下合理控制车速的问题,取得提高自动驾驶的安全性和舒适性的效果。
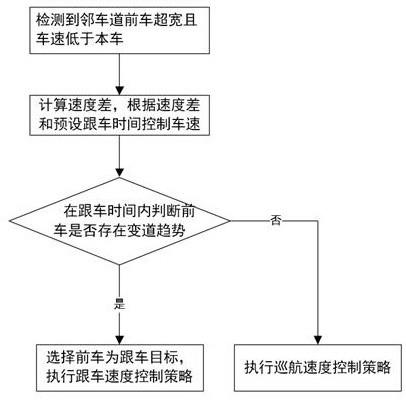
6.为解决上述技术问题,本发明采用如下技术方案:一种用于自动驾驶的速度控制方法,包括如下步骤:1)检测到相邻车道的前车为大型车辆且前车的车速低于本车的车速;2)计算出前车与本车的速度差vd,根据速度差vd控制本车的车速以使本车跟随前车行驶的时间大于等于tf;3)在时间tf内持续对前车进行追踪,并判断前车是否存在变道趋势;是,则执行步骤4);否,则基于巡航速度控制策略进行巡航行驶;
4)选择前车为跟车目标,基于跟车速度控制策略进行跟车行驶。
7.进一步地,步骤1)基于搭载于本车车头的摄像头和毫米波雷达实现。
8.进一步地,步骤2)包括如下子步骤:21)通过摄像头和毫米波雷达获取前车与本车沿行驶方向的相对距离dd和前车的车速vt,计算出前车与本车的速度差vd;22)根据预设的摄像头的有效识别距离为de和有效识别时间为tf,计算出本车与前车距离为de时,本车跟随前车行驶所需的目标车速vc;23)根据目标车速计算出本车跟随前车行驶所需的减速量va。
9.进一步地,步骤22)中所述目标车速vc的计算公式如下:vc=de/tf+vt;步骤23)中所述减速量va的计算公式如下:va=vd+de/tf。
10.进一步地,步骤3)中所述在tf时间内持续对前车进行追踪,并判断前车是否存在变道趋势包括如下内容:对前车的横向速度进行线性二次拟合得到前车的预估位置;若在tf时间内,前车的预估位置均越过车道线,则判断前车存在变道趋势;否则判断前车不存在变道趋势。
11.本发明还包括一种存储介质,所述存储介质内存储有计算机可读程序,所述计算机可读程序被调用时,可执行如上所述一种用于自动驾驶的速度控制方法的步骤。
12.相比现有技术,本发明的有益效果如下:1、本发明所述一种用于自动驾驶的速度控制方法,针对相邻车道的前车为大型车辆的情况,主动减速以增加传感器对前车进行识别及追踪的时间,提高判断前车换道趋势的准确率,从而避免由于传感识别不准导致的目标误选,有效降低自动驾驶在超越相邻车道前车场景下的误制动率和漏制动率。
13.2、本发明所述一种用于自动驾驶的速度控制方法,针对相邻车道的前车为大型车辆且需要超车的情况,根据本车与前车的速度差主动调节本车的车速,减少因本车超车时车速过快而造成的压迫感,避免驾驶员和乘客恐慌,提高自动驾驶的安全性和舒适性。
14.3、本发明所述一种用于自动驾驶的速度控制方法,基于自动驾驶系统的硬件进行,不需要额外增加硬件,适用性强。
附图说明
15.图1为实施例的一种用于自动驾驶的速度控制方法的流程图。
具体实施方式
16.下面结合附图对本发明的具体实施方式作进一步的详细说明。
17.实施例:请参见图1,一种用于自动驾驶的速度控制方法,包括如下步骤:1)基于搭载于本车上的传感器检测到相邻车道的前车为大型车辆且前车的车速低于本车的车速;本实施例中所述传感器为搭载于本车车头的摄像头、激光雷达和毫米波雷达,采用行业常用的视觉目标类别识别算法,摄像头能够检测出前方车辆的的类别,再融
合车道线方程即可判断前车所处位置属于本车道还是相邻车道;基于自动驾驶系统的硬件进行,不需要额外增加硬件,适用性强。
18.2)计算出前车与本车的速度差vd,根据速度差vd控制本车的车速以使本车跟随前车行驶的时间大于等于tf;包括如下子步骤:21)通过摄像头和毫米波雷达获取前车与本车沿行驶方向的相对距离dd和前车的车速vt,计算出前车与本车的速度差vd;22)根据预设的摄像头的有效识别距离为de和有效识别时间为tf,计算出本车与前车距离为de时,本车跟随前车行驶所需的目标车速vc,计算公式为vc=de/tf+vt;23)根据目标车速计算出本车跟随前车行驶所需的减速量va,计算公式为va=vd+de/tf。
19.3)在时间tf内持续对前车进行追踪,并判断前车是否存在变道趋势;是,则执行步骤4);否,则基于巡航速度控制策略进行巡航行驶;本实施例中,判断前车是否存在变道趋势的具体操作如下:对前车的横向速度进行线性二次拟合得到前车的预估位置;若在tf时间内,前车的预估位置均越过车道线,则判断前车存在变道趋势;否则判断前车不存在变道趋势;实施时,为减小误差,还可以将车道线位置的变化纳入判断前车是否存在变道趋势中。
20.4)选择前车为跟车目标,基于跟车速度控制策略进行跟车行驶;所述跟车速度控制策略和巡航速度控制策略请参见背景技术内容。
21.基于判断结果,采用常规的速度控制策略;即若判断前车有变道意图,主动选择前车为跟车目标,并根据前车的车速和设定的跟车时距进行速度控制;若判断前车无换道意图,则以本车设定的巡航速度为依据,在经过前车时开始加速,以实现加速超越前车尽量减少和前车并行行驶的时间。
22.本发明所述一种用于自动驾驶的速度控制方法,针对相邻车道的前车为大型车辆的情况,主动减速以增加传感器对前车进行识别及追踪的时间,提高判断前车换道趋势的准确率,从而避免由于传感识别不准导致的目标误选,有效降低自动驾驶在超越相邻车道前车场景下的误制动率和漏制动率。针对相邻车道的前车为大型车辆且需要超车的情况,根据本车与前车的速度差主动调节本车的车速,减少因本车超车时车速过快而造成的压迫感,避免驾驶员和乘客恐慌,提高自动驾驶的安全性和舒适性。
23.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1