用于扭力转向减轻的过度学习保护的系统和方法与流程
用于扭力转向减轻的过度学习保护的系统和方法
1.相关申请的交叉引用
2.本专利申请要求于2021年4月2日提交序列号为63/170,109的美国临时专利申请的优先权,通过引用将该美国临时专利申请的全部内容并入本文。
技术领域
3.本公开涉及转向系统,特别是涉及用于扭力转向减轻(torque steer mitigation,扭矩转向缓解)的过度学习保护的系统和方法。
背景技术:
4.交通工具(如汽车、卡车、运动型多功能车、跨界车(crossover)、小型货车、船舶、飞行器、全地形车、休闲车或其他合适的交通工具/车辆)包括转向系统,诸如电动助力转向(eps)系统、线控转向(sbw)转向系统、液压转向系统或其他合适的转向系统。所述转向系统通常包括用于为转向系统的各种部件提供扭矩的各种扭矩路径。
5.通常,这样的转向系统可以包括或使用一个或多个扭力转向减轻功能部。这样的扭力转向减轻功能部可以具有多个被设定为快速学习的标定部(calibration,校正),其可以允许这样的扭力转向减轻功能相对快地补偿由于传递扭矩而导致的扭矩偏移。然而,这样可能导致扭力转向减轻功能在连续的关键周期上“过度学习(over learning)”,原因在于所学习的增益可被存储为“长期增益”,并且在新的关键周期上,学习了“短期增益”(例如,所学习的传递扭矩到手轮扭矩偏移的增益可能会变得增加到一非期望的数值)。这可能引起拉动效应(pulling effect,牵引效应),车辆的操作者可在相反方向上经历这种拉动效应。
技术实现要素:
6.概括而言,本公开涉及转向系统。
7.所公开的实施例的一方面包括一种用于为扭力转向减轻提供过度学习保护的方法。所述方法包括:接收与同传动扭矩关联的扭矩偏移对应的补偿扭矩值;以及接收同转向系统的手轮(handwheel,驾驶盘)关联的手轮扭矩值。所述方法还包括:检测所述补偿扭矩值的数学符号;检测所述手轮扭矩值的数学符号;以及判定所述补偿扭矩值的数学符号是否与所述手轮扭矩值的数学符号相同。所述方法还包括:响应于对所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号不同的判定(determination,确定),调节一个或多个所学习的增益(learned gain),以及通过对所述补偿扭矩值的数学符号进行求反(inverting,求逆)而生成求反后的补偿扭矩值。
8.所公开的实施例的另一方面包括一种用于为扭力转向减轻提供过度学习保护的系统。所述系统包括处理器和存储器。所述存储器包括指令(instruction,指示),所述指令在由所述处理器执行时使所述处理器:接收与同传动扭矩相关联的扭矩偏移对应的补偿扭矩值;接收与转向系统的手轮相关联的手轮扭矩值;检测所述补偿扭矩值的数学符号;检测
所述手轮扭矩值的数学符号;判定所述补偿扭矩值的数学符号是否与所述手轮扭矩值的数学符号相同;响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号不同的判定:调节一个或多个所学习的增益;以及通过对所述补偿扭矩值的数学符号求反而生成求反后的补偿扭矩值。
9.所公开的实施例的另一方面包括一种用于为扭力转向缓解提供过度学习保护的设备。所述设备包括处理器和存储器。所述存储器包括多个指令,所述指令在被所述处理器执行时使得所述处理器:接收与扭矩偏移对应的补偿扭矩值(所述扭矩偏移与传动扭矩相关联);接收与转向系统的手轮相关联的手轮扭矩值;检测所述补偿扭矩值的数学符号;检测所述手轮扭矩值的数学符号;判定所述补偿扭矩值的数学符号是否与所述手轮扭矩值的数学符号相同;响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号不同的判定:调节一个或多个所学习的增益;通过对所述补偿扭矩值的数学符号求反而生成求反后的补偿扭矩值;基于所述求反后的补偿扭矩值和所述手轮扭矩值而生成扭矩命令(torque command,转矩指令);以及基于所述扭矩命令来选择性地控制转向的至少一个方面;以及响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号相同的判定:基于所述补偿扭矩值和所述手轮扭矩值而生成扭矩命令;以及基于所述扭矩命令来选择性地控制转向的至少一个方面。
10.在下文对实施例的详细描述中、以及在随附权利要求书和附图中,披露了本公开的这些方面和其他多个方面。
附图说明
11.当结合附图阅读时,从以下详细描述中将最好地理解本公开。要强调的是,根据惯例,附图的各种特征不是按比例绘示的。相反,为了清楚起见,各种特征的尺寸被隧意地扩大或缩小。
12.图1总体上示出了根据本公开原理的车辆。
13.图2a总体上示出了根据本公开原理的一种过度学习保护系统。
14.图2b是总体上示出了根据本公开原理的一种过度学习保护方法的流程图。
15.图3是总体上示出了根据本公开原理的一种替代的过度学习保护方法的流程图。
16.图4是总体上示出了根据本公开原理的一种替代的过度学习保护方法的流程图。
具体实施方式
17.以下讨论涉及本公开的各种实施例。尽管可能这些实施例中的一个或多个是优选的,但是所公开的实施例不应被解释为(抑或被用来)限制本公开(包括权利要求)的范围。另外,本领域技术人员将理解的是,以下描述具有广泛的应用,并且对应任何实施例的论述仅意味着该实施例的示范性阐示,而并非旨在暗示本公开(包括权利要求)的范围被限制到该实施例。
18.如所描述的,交通工具(诸如汽车、卡车、运动型多功能车、跨界车、小型货车、船舶、飞行器、全地形车、休闲车或其他合适的交通工具/车辆)包括转向系统,诸如电动助力转向(eps)系统、线控转向(sbw)转向系统、液压转向系统或其他合适的转向系统。所述转向系统通常包括用于为转向系统的各种部件提供扭矩的各种扭矩路径。
19.通常,这样的转向系统可以包括或使用一个或多个扭力转向减轻功能部。这样的扭力转向减轻功能部可以具有被设定为快速学习的标定部,其可以允许这样的扭力转向减轻功能部能相对快地补偿由于传递扭矩而导致的扭矩偏移。然而,这样可能导致扭力转向减轻功能在连续的关键周期上“过度学习”,原因在于所学习的增益可被存储为“长期增益”,并且在新的关键周期上,学习了“短期增益”(例如,所学习的传递扭矩与手轮扭矩偏移的增益可能会变得增加到一非期望的值)。这可能引起拉动效应,车辆的操作者可在相反方向上经历这种拉动效应。
20.因此,被配置用以针对扭力转向减轻提供过度学习保护的系统和方法(诸如本文所述的那些系统和方法)是可取的。在一些实施例中,本文描述的系统和方法可以被配置用以检测用于补偿的扭矩命令和手轮扭矩的符号的差异。例如,过度学习情景导致了用于补偿的扭矩命令和手轮扭矩中的符号差异(例如,在正常条件下,用于补偿的扭矩命令与手轮扭矩的符号是相同的)。过度学习可以被定义为所计算的扭矩命令与手轮扭矩信号具有不同符号。
21.在一些实施例中,本文描述的系统和方法可以被配置为能识别扭矩命令的符号何时被“翻转(flipped)”(例如,从一个符号改变到另一个符号和/或与手轮扭矩的符号不同),这样可能表示(存在)过度学习。本文描述的系统和方法可以被配置为施加缓变率,这可以防止扭矩的突然变化,并且可以允许扭矩朝向正确的方向缓变地返回。本文描述的系统和方法可被配置为使得用于转向系统的学习增益减小(例如,因为在过度学习情景中,学习增益已经增加到非期望的值)。
22.在一些实施例中,本文描述的系统和方法可以被配置为将过滤器应用于扭矩命令信号和/或手轮扭矩信号。所述过滤器可以被配置用以防止本文描述的系统和方法在检测过度学习与不检测过度学习之间交替。例如,扭矩命令信号和手轮扭矩信号可能相对较小,这可能导致与扭矩命令信号和手轮扭矩信号相关联的符号以一相对快节奏变化(例如,由于转向系统中的噪声或动态)。所述过滤器可被配置为负责处理这种小的扭矩命令信号和手轮扭矩信号(例如,以及与小的扭矩命令信号和小的手轮扭矩信号相关联的快速变化的符号)。
23.在一些实施例中,本文描述的系统和方法可以被配置为基于信号符号(例如,与扭矩命令和手轮扭矩对应)来检测过度学习。本文描述的系统和方法可以被配置为提供对符号差异的减轻、缓变率和/或增益减少。
24.在一些实施例中,本文描述的系统和方法可以被配置为接收补偿扭矩值。本文描述的系统和方法可以被配置为接收手轮扭矩值。本文描述的系统和方法可以被配置为检测补偿扭矩值的数学符号。本文描述的系统和方法可以被配置为检测手轮扭矩值的数学符号。本文描述的系统和方法可以被配置为判定补偿扭矩值的数学符号是否与手轮扭矩值的数学符号相同。
25.在一些实施例中,本文描述的系统和方法可以被配置为,响应于补偿扭矩值的数学符号与手轮扭矩值的数学符号相同的判定,根据正常操作提供补偿,以及应用缓变率以防止扭矩的突然变化。
26.在一些实施例中,本文描述的系统和方法可以被配置为,响应于补偿扭矩值的数学符号与手轮扭矩值的数学符号不同的判定,减少所学习的增益并对补偿扭矩值的数学符
号求反。本文描述的系统和方法可以被配置为应用缓变率以防止扭矩的突然变化。
27.在一些实施例中,本文所描述的系统和方法可以被配置为用以接收与同传动扭矩相关联的扭矩偏移对应的补偿扭矩值。本文描述的系统和方法可以被配置用以接收与转向系统的手轮相关联的手轮扭矩值。本文描述的系统和方法可以被配置用以检测补偿扭矩值的数学符号。本文描述的系统和方法可以被配置用以检测手轮扭矩值的数学符号。本文描述的系统和方法可以被配置用以判定补偿扭矩值的数学符号是否与手轮扭矩值的数学符号相同。
28.本文描述的系统和方法可以被配置为,响应于补偿扭矩值的数学符号与手轮扭矩值的数学符号不同的判定,而调节一个或多个所学习的增益。例如,本文描述的系统和方法可以被配置用以减小或减少对应于一个或多个历史补偿扭矩值的一个或多个所学习的增益。本文描述的系统和方法可被配置为通过对补偿扭矩值的数学符号求反而生成求反后的补偿扭矩值。
29.在一些实施例中,本文描述的系统和方法可以被配置为,基于求反后的补偿扭矩值和手轮扭矩值而生成扭矩命令;以及基于所述扭矩命令而选择性地控制转向的至少一个方面。本文描述的系统和方法可以被配置为,还基于至少与求反后的补偿扭矩值相关联的一个或多个缓变率而生成扭矩命令。
30.在一些实施例中,本文描述的系统和方法可以被配置为,响应于补偿扭矩值的数学符号与手轮扭矩值的数学符号相同的判定,基于补偿扭矩值和手轮扭矩值而生成扭矩命令,以及基于所述扭矩命令而选择性地控制转向的至少一个方面。本文描述的系统和方法可以被配置为,还基于至少与补偿扭矩值相关联的一个或多个缓变率而生成扭矩命令。
31.图1大体上示出了根据本公开的原理的车辆10。车辆10可以包括任何合适的车辆,诸如汽车、卡车、运动型多功能车、小型货车、跨界车、任何其他乘用车、任何合适的商用车或任何其他合适的车辆。虽然车辆10被示出为具有车轮且用于道路上的乘用车,但是本公开的原理可以应用于其他交通工具,诸如飞机、船、火车、无人机或其他合适的交通工具/车辆。
32.车辆10包括车辆主体12和发动机罩14。乘客室18至少部分地由车辆主体12限定。车辆主体12的另一部分限定发动机室20。发动机罩14可以可移动地附接到车辆主体12的一部分,使得当发动机罩14处于第一位置或打开位置时,发动机罩14提供到达发动机室20的途径,并且当发动机罩14处于第二位置或关闭位置时,发动机罩14盖住发动机室20。在一些实施例中,发动机室20可以设置在(与通常所示相比而言)车辆10的后部。
33.乘客室18可以设置在发动机室20的后方,但是在发动机室20设置在车辆10的后部的实施例中,乘客室可以设置在发动机室20的前方。车辆10可以包括任何合适的推进系统,其包括:内燃机,一个或多个电动马达(例如,电动车辆),一个或多个燃料电池,包括内燃机、一个或多个电动马达的组合的混合(例如,混合动力车辆)推进系统,以及/或者任何其他合适的推进系统。
34.在一些实施例中,车辆10可以包括汽油发动机或汽油燃料发动机,诸如火花点火式发动机。在一些实施例中,车辆10可以包括柴油燃料发动机,诸如压缩点火式发动机。发动机室20容纳和/或包围车辆10的推进系统的至少一些部件。附加地或替代地,推进控制装置,诸如加速器致动器(例如,加速器踏板)、制动致动器(例如,制动踏板)、方向盘和其他此
类部件被设置在车辆10的乘客室18中。推进控制装置可以由车辆10的驾驶员致动或控制,并且可以分别直接连接到推进系统的对应部件,诸如油门、制动器、车轴、车辆变速器等。在一些实施例中,推进控制装置可以将信号传达到车辆计算机(例如,线控驾驶),该车辆计算机进而可以控制推进系统的对应的推进部件。这样,在一些实施例中,车辆10可以是自动驾驶车辆。
35.在一些实施例中,车辆10包括经由飞轮、离合器或液力联轴节与曲轴联通的变速器。在一些实施例中,所述变速器包括手动变速器。在一些实施例中,所述变速器包括自动变速器。在内燃机或混合动力车辆的情况下,车辆10可以包括一个或多个活塞,其与曲轴协同运行以产生力,该力通过变速器而被传递到一个或多个轴上,其使得车轮22转动。当车辆10包括一个或多个电动马达时,车辆电池和/或燃料电池向电动马达提供能量以转动车轮22。
36.车辆10可以包括自动车辆推进系统,诸如巡航控制、自适应巡航控制、自动制动控制、其他自动式车辆推进系统或其组合。车辆10可以是自动或半自动车辆,或其他合适类型的车辆。车辆10可以包括比本文概括性阐示和/或公开的特征更多或更少的特征。
37.在一些实施例中,车辆10可以包括以太网部件24、控制器局域网(can)总线26、面向媒体的系统传输部件(most)28、flexray部件30(例如,线控制动系统等)和本地互连网部件(lin)32。车辆10可以使用can总线26、most 28、flexray部件30、lin 32、其他合适的网络或通信系统或其组合,来将各种信息从例如车辆内或车辆外部的传感器传达到例如车辆内或车辆外部的各种处理器或控制器。车辆10可以包括与本文概括性阐示和/或公开的特征相比的另外的特征或更少的特征。
38.在一些实施例中,车辆10可以包括转向系统,诸如eps系统、线控转向式转向系统(例如,其可以包括对转向系统的部件进行控制的一个或多个控制器或与这些控制器通信,而不使用车辆10的手轮与车轮22之间的机械连接)、以及液压转向系统(例如,其可以包括结合到液压转向系统的阀组件中的磁致动器)或其他合适的转向系统。
39.转向系统可以包括开环反馈控制系统或机构、闭环反馈控制系统或机构或其组合。转向系统可以被配置为接收各种输入,包括但不限于手轮位置、输入扭矩、一个或多个车轮位置、其他合适的输入或信息,或者其组合。
40.附加地或替代地,所述输入可以包括手轮扭矩、手轮角度、马达速度、车辆速度、估计的马达扭矩命令、其他合适的输入或其组合。转向系统可以被配置为向车辆10提供转向功能和/或控制。例如,转向系统可基于各种输入而生成辅助扭矩。转向系统可被配置为使用辅助扭矩来选择性地控制转向系统的马达,以向车辆10的操作者提供转向辅助。
41.在一些实施例中,转向系统可以包括转向系统控制器,诸如控制器100,如图2a中大体示出的。控制器100可以包括任何合适的控制器。控制器100可以被配置为控制例如转向系统的各种功能。控制器100可以包括处理器102和存储器104。处理器102可以包括任何合适的处理器,诸如本文所述的那些。附加地或替代地,除了处理器102以外或者作为处理器102的替代,控制器100还可以包括任何合适数量的处理器。存储器104可以包括单个磁盘或多个磁盘(例如,硬盘驱动器),并且包括存储管理模块(其管理存储器104内的一个或多个分区)。在一些实施例中,存储器104可以包括闪存、半导体(固态)存储器。存储器104可以包括随机存取存储器(ram)、只读存储器(rom)或其组合。存储器104可以包括指令,所述指
令在由处理器102执行时使处理器102至少控制转向系统的各种功能的。
42.控制器100可以从各种测量装置或传感器106接收一个或多个信号(此信号指示所感测或测得的车辆10的特性)。传感器106可以包括任何合适的传感器、测量装置和/或其他合适的机构。例如,传感器106可以包括一个或多个扭矩传感器或装置、一个或多个手轮位置传感器或装置、一个或多个马达位置传感器或装置、一个或多个位置传感器或装置、其他合适的传感器或装置,或者其组合。上述一个或多个信号可以指示手轮扭矩、手轮角度、马达速度、车辆速度、其他合适的信息或者其组合。
43.在一些实施例中,控制器100可被配置用以针对扭力转向减轻检测过度学习并提供过度学习保护。控制器100可以接收手轮扭矩值。该手轮扭矩值可对应于施加到车辆10的手轮的扭矩的量。控制器100可以从传感器接收手轮扭矩值,所述传感器诸如传感器106或其他合适的传感器,其被配置为测量作用在手轮上的扭矩的量。
44.控制器100可以接收和/或计算补偿扭矩值。该补偿扭矩值可以对应于基于手轮扭矩值和/或其他合适的值、信号、数据、信息之类而计算的扭矩命令。控制器100可以检测补偿扭矩值的数学符号。控制器100可以检测手轮扭矩值的数学符号。控制器100可以判定补偿扭矩值的数学符号是否与手轮扭矩值的数学符号相同。
45.在一些实施例中,响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号相同的判定,控制器100可以根据正常操作提供补偿。控制器100可以应用缓变率(ramp rate)来防止扭矩的突然变化。
46.在一些实施例中,响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号不同的判定,控制器100可以减小所学习的增益并对补偿扭矩值的数学符号求反。控制器100可以应用缓变率以防止扭矩的突然变化。
47.在一些实施例中,控制器100可以接收与传动扭矩相关联的扭矩偏移对应的补偿扭矩值。控制器100可以接收与转向系统的手轮相关联的手轮扭矩值。控制器100可以检测补偿扭矩值的数学符号。控制器100可以检测手轮扭矩值的数学符号。控制器100可以判定补偿扭矩值的数学符号是否与手轮扭矩值的数学符号相同。
48.控制器100可以响应于补偿扭矩值的数学符号与手轮扭矩值的数学符号不同的判定,而调节一个或多个所学习的增益。例如,控制器100可以减小或减少与一个或多个历史补偿扭矩值相对应的一个或多个所学习的增益。控制器100可以通过对补偿扭矩值的数学符号求反而生成求反后的补偿扭矩值。
49.在一些实施例中,控制器100可基于所述求反后的补偿扭矩值和手轮扭矩值而生成扭矩命令,并基于扭矩命令来选择性地控制转向的至少一个方面。控制器100可进一步基于至少与求反后的补偿扭矩值相关联的一个或多个缓变率而生成扭矩命令。
50.在一些实施例中,响应于补偿扭矩值的数学符号与手轮扭矩值的数学符号相同的判定,控制器100可以基于补偿扭矩值和手轮扭矩值而生成扭矩命令,并且基于扭矩命令来选择性地控制转向的至少一个方面。控制器100可以进一步基于至少与补偿扭矩值相关联的一个或多个缓变率而生成扭矩命令。
51.在一些实施例中,控制器100可以执行本文描述的方法。然而,本文描述的由控制器100执行的方法并不意味着被限制,并且在不脱离本公开的范围的情况下,在控制器或处理器上执行的任何类型的软件可以执行本文描述的方法。例如,控制器(诸如在计算机装置
内执行软件的处理器)可以执行本文描述的方法。
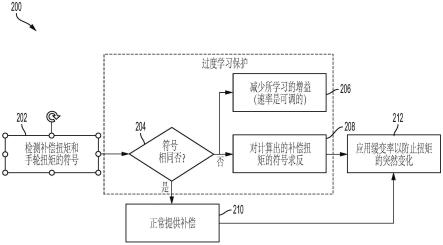
52.图2b是大体上示出了根据本公开的原理的过度学习保护方法200的流程图。在(步骤)202处,方法200检测补偿扭矩和手轮扭矩的符号。例如,控制器100可以检测补偿扭矩和手轮扭矩的符号。
53.在(步骤)204处,方法200判定上述符号是否相同。例如,控制器100可以判定上述补偿扭矩的符号和手轮扭矩的符号是否相同。如果控制器100判定补偿扭矩的符号和手轮扭矩的符号相同,则方法200在(步骤)210处继续。或者是,如果控制器100判定补偿扭矩的符号和手轮扭矩的符号不相同,则方法200在(步骤)206处继续。
54.在(步骤)206处,方法200使所学习的增益减少。例如,控制器100可以减少所学习的增益。应理解的是,(例如,所学习的增益的)速率可以是可调的。
55.在(步骤)208处,方法200对计算出的补偿扭矩的符号求反。例如,控制器100可以对补偿扭矩(例如,计算出的补偿扭矩)的符号求反。应理解的是,方法200可以以任何合适的顺序或者同时(例如,或基本上同时)执行(步骤)206和(步骤)208。
56.在(步骤)210处,方法200正常提供补偿。例如,控制器100可以(例如,根据正常操作)正常提供补偿。
57.在(步骤)212处,方法200可以应用缓变率以来止扭矩的突然变化。例如,控制器100可以应用缓变率来防止扭矩的突然变化。
58.图3是大体上示出了根据本公开的原理的另一种过度学习保护方法300的流程图。在(步骤)302处,方法300接收补偿扭矩值。例如,控制器100可以接收补偿扭矩值。
59.在(步骤)304处,方法300接收手轮扭矩值。例如,控制器100可以接收手轮扭矩值。
60.在(步骤)306处,方法300检测补偿扭矩值的数学符号。例如,控制器100可以检测补偿扭矩值的数学符号。
61.在(步骤)308处,方法300检测手轮扭矩值的数学符号。例如,控制器100可以检测手轮扭矩的数学符号。
62.在(步骤)310处,方法300判定补偿扭矩值的数学符号是否与手轮扭矩值的数学符号相同。例如,控制器100可以判定补偿扭矩值的数学符号是否与手轮扭矩值的数学符号相同。
63.在(步骤)312处,方法300响应于补偿扭矩值的数学符号与手轮扭矩值的数学符号相同的判定,按照正常操作提供补偿并应用缓变率以防止扭矩的突然变化。控制器100可以响应于补偿扭矩值的数学符号与手轮扭矩值的数学符号相同的判定,按照正常操作提供补偿并应用缓变率以防止扭矩的突然变化。
64.在一些实施例中,响应于补偿扭矩值的数学符号与手轮扭矩值的数学符号不同的判定,控制器100可以减少所学习的增益并对补偿扭矩值的数学符号求反。在一些实施例中,控制器100应用缓变率以防止扭矩的突然变化。
65.图4是大体上示出了根据本公开的原理的另一种过度学习保护方法400的流程图。在(步骤)402处,方法400接收与扭矩偏移(其与传动扭矩相关联)对应的补偿扭矩值。例如,控制器100可以接收补偿扭矩值。
66.在(步骤)404处,方法400接收与转向系统的手轮相关联的手轮扭矩值。例如,控制器100可以接收手轮扭矩值。
67.在(步骤)406处,方法400检测补偿扭矩值的数学符号。例如,控制器100可以检测补偿扭矩值的数学符号。
68.在(步骤)408处,方法400检测手轮扭矩值的数学符号。例如,控制器100可以检测手轮扭矩的数学符号。
69.在(步骤)410处,方法400判定补偿扭矩值的数学符号是否与手轮扭矩值的数学符号相同。例如,控制器100可以判定补偿扭矩值的数学符号是否与手轮扭矩值的数学符号相同。
70.在(步骤)412处,方法400响应于补偿扭矩值的数学符号与手轮扭矩值的数学符号不同的判定,调节一个或多个所学习的增益,并通过对补偿扭矩值的数学符号求反而生成求反后的补偿扭矩值。例如,控制器100可以响应于补偿扭矩值的数学符号与手轮扭矩值的数学符号不同的判定,调节一个或多个所学习的增益,并通过对补偿扭矩值的数学符号求反而生成求反后的补偿扭矩值。控制器100可基于求反后的补偿扭矩值和手轮扭矩值而生成扭矩命令。控制器100可基于该扭矩命令而选择性地控制转向的至少一个方面。
71.在一些实施例中,一种用于为扭力转向减轻提供过度学习保护的系统包括处理器和存储器。所述存储器包括多个指令,所述指令在由所述处理器执行时使所述处理器执行如下功能:接收补偿扭矩值;接收手轮扭矩值;检测所述补偿扭矩值的数学符号;检测所述手轮扭矩值的数学符号;判定所述补偿扭矩值的数学符号是否与所述手轮扭矩值的数学符号相同;响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号相同的判定,按照正常操作提供补偿并应用缓变率以防止扭矩的突然变化。
72.在一些实施例中,所述指令还使所述处理器响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号不同的判定,减少所学习的增益并对所述补偿扭矩值的数学符号求反。在一些实施例中,所述指令还使所述处理器应用缓变率以防止扭矩的突然变化。
73.条款1.一种用于为扭力转向减轻提供过度学习保护的方法,所述方法包括:接收与同传动扭矩相关联的扭矩偏移对应的补偿扭矩值;接收与转向系统的手轮相关联的手轮扭矩值;检测所述补偿扭矩值的数学符号;检测所述手轮扭矩值的数学符号;判定所述补偿扭矩值的数学符号是否与所述手轮扭矩值的数学符号相同;响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号不同的判定:调节一个或多个所学习的增益;以及通过对所述补偿扭矩值的数学符号求反而生成求反后的补偿扭矩值。
74.条款2.根据本文所述条款的一个或多个所述的方法,还包括:基于所述求反后的补偿扭矩值和所述手轮扭矩值而生成扭矩命令;以及基于所述扭矩命令来选择性地控制转向的至少一个方面。
75.条款3.根据本文所述条款的一个或多个所述的方法,其中,还基于至少与所述求反后的补偿扭矩值相关联的一个或多个缓变率而生成所述扭矩命令。
76.条款4.根据本文所述条款的一个或多个所述的方法,还包括:响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号相同的判定:基于所述补偿扭矩值和所述手轮扭矩值而生成扭矩命令;以及基于所述扭矩命令来选择性地控制转向的至少一个方面。
77.条款5.根据本文所述条款的一个或多个所述的方法,其中,还基于至少与所述补偿扭矩值相关联的一个或多个缓变率而生成所述扭矩命令。
78.条款6.根据本文所述条款的一个或多个所述的方法,其中,所述转向系统包括电
子助力转向系统。
79.条款7.根据本文所述条款的一个或多个所述的方法,其中,所述转向系统包括线控转向式转向系统。
80.条款8.根据本文所述条款的一个或多个所述的方法,其中,调节一个或多个所学习的增益包括减小所述一个或多个所学习的增益。
81.条款9.根据本文所述条款的一个或多个所述的方法,其中,所述一个或多个所学习的增益对应于一个或多个历史补偿扭矩值。
82.条款10.一种用于为扭力转向减轻提供过度学习保护的系统,所述系统包括:处理器;以及存储器,所述存储器包括多个指令,所述指令在被所述处理器执行时使所述处理器执行如下操作:接收与同传动扭矩相关联的扭矩偏移对应的补偿扭矩值;接收与转向系统的手轮相关联的手轮扭矩值;检测所述补偿扭矩值的数学符号;检测所述手轮扭矩值的数学符号;判定所述补偿扭矩值的数学符号是否与所述手轮扭矩值的数学符号相同;响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号不同的判定:调节一个或多个所学习的增益;以及通过对所述补偿扭矩值的数学符号求反而生成求反后的补偿扭矩值。
83.条款11.根据本文所述条款的一个或多个所述的系统,其中,所述指令还使所述处理器执行如下操作:基于所述求反后的补偿扭矩值和所述手轮扭矩值而生成扭矩命令;以及基于所述扭矩命令来选择性地控制转向的至少一个方面。
84.条款12.根据本文所述条款的一个或多个所述的系统,其中,所述指令使所述处理器还基于至少与所述求反后的补偿扭矩值相关联的一个或多个缓变率而生成所述扭矩命令。
85.条款13.根据本文所述条款的一个或多个所述的系统,其中,所述指令还使所述处理器响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号相同的判定:基于所述补偿扭矩值和所述手轮扭矩值而生成扭矩命令;以及基于所述扭矩命令来选择性地控制转向的至少一个方面。
86.条款14.根据本文所述条款的一个或多个所述的系统,其中,所述指令还使所述处理器还基于至少与所述补偿扭矩值相关联的一个或多个缓变率而生成所述扭矩命令。
87.条款15.根据本文所述条款的一个或多个所述的系统,其中,所述转向系统包括电子助力转向系统。
88.条款16.根据本文所述条款的一个或多个所述的系统,其中,所述转向系统包括线控转向式转向系统。
89.条款17.根据本文所述条款的一个或多个所述的系统,其中,所述指令还使所述处理器通过减小所述一个或多个所学习的增益来调节一个或多个所学习的增益。
90.条款18.根据本文所述条款的一个或多个所述的系统,其中,所述一个或多个所学习的增益对应于一个或多个历史补偿扭矩值。
91.条款19.一种用于为扭力转向缓解提供过度学习保护的设备,所述设备包括:处理器;以及存储器,所述存储器包括多个指令,所述指令在被所述处理器执行时使所述处理器执行如下操作:接收与同传动扭矩相关联的扭矩偏移对应的补偿扭矩值;接收与转向系统的手轮相关联的手轮扭矩值;检测所述补偿扭矩值的数学符号;检测所述手轮扭矩值的数学符号;判定所述补偿扭矩值的数学符号是否与所述手轮扭矩值的数学符号相同;响应于
所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号不同的判定:调节一个或多个所学习的增益;通过对所述补偿扭矩值的数学符号求反而生成求反后的补偿扭矩值;基于所述求反后的补偿扭矩值和所述手轮扭矩值而生成扭矩命令;以及基于所述扭矩命令来选择性地控制转向的至少一个方面;以及响应于所述补偿扭矩值的数学符号与所述手轮扭矩值的数学符号相同的判定:基于所述补偿扭矩值和所述手轮扭矩值而生成扭矩命令;以及基于所述扭矩命令来选择性地控制转向的至少一个方面。
92.条款20.根据本文所述条款的一个或多个所述的设备,其中,所述指令还使所述处理器还基于至少与所述补偿扭矩值相关联的一个或多个缓变率而生成所述扭矩命令。
93.词语“示例”在本文中用来表示用作示例、例子或说明。本文中被描述为“示例”的任何方面或设计并非必须被解释为比其他方面或设计更优选或有利。相反,使用“示例”一词旨在将概念以具体方式来呈现。如在本技术中使用的,术语“或”旨在表示包括性的“或”而不是排他性的“或”。即,除非另有说明或者从上下文可以清楚地看出,否则“x包括a或b”旨在表示任何自然的包含性排列。即,如果x包含a;x包括b;或x包括a和b二者,则在任何前述情况下均满足“x包括a或b”。另外,在本技术和所附权利要求书中使用的冠词“一(a/an)”通常应被解释为意指“一个或多个”,除非另有说明或者根据上下文清楚地指向单数形式。此外,除非明确如此描述,否则贯穿全文使用的术语“实施方式”或“一个实施方式”并飞旨在表示相同的实施例或实施方式。
94.本文描述的系统、算法、方法、指令等的实现可以以硬件、软件或其任何组合来实现。硬件可以包括,例如,计算机、知识产权(ip)内核、专用集成电路(asic)、可编程逻辑阵列、光学处理器、可编程逻辑控制器、微代码、微控制器、服务器、微处理器、数字信号处理器或任何其他合适的电路。在权利要求中,术语“处理器”应被理解为单独地或组合地包括任何前述硬件。术语“信号”和“数据”可互换使用。
95.如这里所使用的,术语模块可以包括被设计为与其他部件一起使用的封装的功能硬件单元、控制器(例如,执行软件或固件的处理器)可执行的一组指令、被配置为执行特定功能的处理电路以及与大型系统接合的自含式硬件或软件部件。例如,模块可以包括专用集成电路(asic)、现场可编程门阵列(fpga)、电路、数字逻辑电路、模拟电路、分立电路的组合、门电路和其他类型硬件或者它们的组合。在其他实施例中,模块可以包括存储器,该存储器存储控制器可执行以实现模块的特征的指令。
96.此外,在一方面,例如,本文描述的系统可以使用具有计算机程序的通用计算机或通用处理器来实现,该计算机程序在被执行时实行本文描述的任何相应的方法、算法和/或指令。附加地或替代地,例如可以利用专用计算机/处理器,其可以包含用于实行本文描述的任何方法、算法或指令的其他硬件。
97.此外,本公开的全部或部分实现方式可以采取可从例如计算机可用或计算机可读介质访问的计算机程序产品的形式。计算机可用或计算机可读介质可以是例如可以有形地包含、存储、传达或传输程序以供任何处理器使用或与其结合使用的任何装置。介质可以是例如电的、磁的、光学的、电磁的装置或半导体装置。也可以使用其他合适的介质。
98.现已描述了上述实施例、实施方式和方面,以允许容易地理解本公开而非限制本公开。相反,本公开旨在覆盖随附权利要求的范围内所包括的各种修改和等效布置,该范围应被赋予最宽泛的解释,以涵盖法律允许的所有此类修改和等效结构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1