一种防干刮智能雨刷器及其控制方法
1.本发明涉及雨刷器技术领域,具体为一种防干刮智能雨刷器及其控制方法。
背景技术:
2.雨刷器是安装在汽车挡风玻璃上最基础且重要的附件,目前市面上汽车雨刷器大致分为两类:第一类是常规的雨刷器;第二类则是自感应雨刮功能。
3.对于第一类雨刮器,当行驶过程中遇到小雨天气时,需要驾驶员频繁开关雨刷器,因为当雨量较小时,前挡风玻璃上的雨水还非常少,行驶中不会妨碍驾驶员视线,此时若使雨刮器按间歇档或低速档工作,会因为挡风玻璃上面的水分少造成雨刷器与挡风玻璃的摩擦力增加,出现干刮的现象,而干刮会降低雨刷器的使用寿命并对挡风玻璃造成不良影响,而若不开启雨刷功能,在经过十几秒后,前挡风玻璃上积累的雨水已经达到了阻碍驾驶员视线的程度,因此驾驶员需要频繁的拨动雨刷器的开关,来减少挡风玻璃干刮的情况,因此在一些使用场景下,此类雨刷器具有较高的使用不便性。
4.对于第二类自感应雨刮器,其是利用雨量传感器或红外传感器来检测前挡风玻璃上面雨水的多少从而调节雨刷器的工作速率,但在小雨情况下仍然存在一些问题,首先,雨水落在挡风玻璃上可能会分布不均匀,当雨量较小时,雨量传感器或红外传感器不一定能准确检测出当前雨水是否会妨碍驾驶员的视线,其次,当雨水过多的落在传感器的敏感区域而其他区域雨水较少时,也会出现干刮的情况,另外,雨量传感器与红外传感器的价格较高,需要较高的硬件成本。
技术实现要素:
5.本发明的目的在于提供一种防干刮智能雨刷器及其控制方法,解决以下技术问题:
6.如何提高雨刷器工作的智能性。
7.本发明的目的可以通过以下技术方案实现:
8.一种防干刮智能雨刷器控制方法,包括:
9.获取雨刮片总成摆动时所受的摩擦力采样值;
10.根据预设摆动规则更新所述雨刮片总成的工作策略。
11.作为本发明进一步的方案:所述预设摆动规则包括:
12.将所述摩擦力采样值与判定区间组比较后得到判断结果,将所述雨刮片总成当前的工作策略更新为对应与所述判断结果对应的驱动策略。
13.作为本发明进一步的方案:所述判定区间组包括第一判定组、第二判定组、第三判定组及第四判定组;
14.所述第一判定组为:(0,f3);
15.所述第二判定组为:[f3,f2];
[0016]
所述第三判定组为:(f2,f1];
[0017]
所述第四判定组为:(f1,+∞);
[0018]
其中,f1为前挡风玻璃上有雨水但不足以妨碍驾驶员视线时的摩擦力,f2为前挡风玻璃上有雨水且已经初步妨碍驾驶员视线时的摩擦力,f3为前挡风玻璃上有雨水且已经严重妨碍驾驶员视线时的摩擦力。
[0019]
作为本发明进一步的方案:所述驱动策略包括:第一策略,第二策略,第三策略及第四策略;
[0020]
所述第一策略为:雨刷器距下一次摆动时间间隔缩短x秒;
[0021]
所述第二策略为:保持雨刷器当前的工作速率;
[0022]
所述第三策略为:雨刷器距下一次摆动时间间隔缩短y秒;
[0023]
所述第四策略为:雨刷器距下一次摆动时间间隔缩短z秒;
[0024]
其中,z>y。
[0025]
作为本发明进一步的方案:还包括:
[0026]
当摆动时间间隔>60秒时,自动结束雨刷器的工作;
[0027]
当摆动时间间隔≤3秒且f∈(0,f3)时,雨刷器下一次摆动时间缩短0.5秒;
[0028]
当摆动时间等于0时,以预设高速挡位的速率进行摆动。
[0029]
一种防干刮智能雨刷器,包括雨刮片总成和压力传感器,所述压力传感器用于获取雨刮片总成摆动时所受的摩擦力,所述雨刮片总成按照调整后的工作策略工作。
[0030]
作为本发明进一步的方案:还包括雨刮臂,所述雨刮臂的一端活动连接有雨刮片总成,所述雨刮片总成相对雨刮臂在特定范围内摆动,所述雨刮臂和雨刮片总成之间设置有压力传感器。
[0031]
作为本发明进一步的方案:所述雨刮臂通过雨刮臂固定弯勾与雨刮片总成连接,所述雨刮片总成的一侧设置有雨刮片卡槽,所述雨刮臂固定弯勾固定在雨刮臂的一端,所述雨刮臂固定弯勾与雨刮片卡槽相配合,所述压力传感器设置在雨刮臂固定弯勾的与雨刮片卡槽内壁相接触的面上。
[0032]
作为本发明进一步的方案:所述压力传感器外侧贴合有绝缘垫片;
[0033]
所述绝缘垫片的尺寸小于压力传感器的尺寸,且所述绝缘垫片采用低弹性材质。
[0034]
作为本发明进一步的方案:所述雨刮臂内开设有导线孔,通过导线孔内的导线,通过导线连接压力传感器及单片机。
[0035]
本发明的有益效果:
[0036]
(1)本发明通过获取雨刮片总成摆动时所受的摩擦力采样值,根据预设摆动规则,进而更新雨刮片总成的工作策略,进而能够适应性的根据挡风玻璃上实际的雨水量调整雨刮片总成的摆动方式,进而防止雨刷器干刮,从而提高雨刷器的寿命并保护了挡风玻璃,提高了雨刷器工作的智能性。
[0037]
(2)本发明适应性的根据挡风玻璃上实际的雨水量调整雨刮片总成的摆动速率及间隔时长,进而防止雨刷器干刮,从而提高雨刷器的寿命并保护了挡风玻璃,提高了雨刷器工作的智能性,另外,压力传感器的成本相比于雨量传感器或红外传感器较低,因此,本发明能够基于低成本提高雨刷器工作的智能性。
附图说明
[0038]
本发明的实施方式的上述和/或附加的方面和优点从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:
[0039]
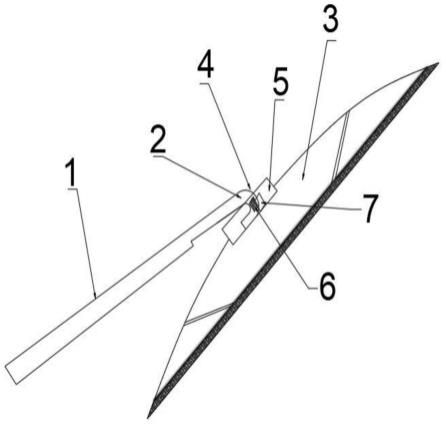
图1是本发明整体结构示意图;
[0040]
图2是本发明一个雨刮器实例的雨刮臂结构示图;
[0041]
图3是本发明一个雨刮器实例的雨刮片总成结构示图;
[0042]
图4是本发明一个雨刮器实例的系统模块框图。
[0043]
附图标记:1、雨刮臂;2、雨刮臂固定弯勾;3、雨刮片总成;4、雨刮臂与雨刮片总成连接点;5、雨刮片卡槽;6、压力传感器;7、绝缘垫片;8、导线孔;9、导线;10、保护盖;11、胶条;12、弹簧板;13、卡扣;14、保护壳;15、固定盖子;16、导流板。
具体实施方式
[0044]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0045]
本发明为一种防干刮智能雨刷器控制方法,包括:
[0046]
获取雨刮片总成3摆动时所受的摩擦力采样值;
[0047]
根据预设摆动规则更新雨刮片总成3的工作策略。
[0048]
本发明通过获取雨刮片总成3摆动时所受的摩擦力采样值,根据预设摆动规则,进而更新雨刮片总成3的工作策略,进而能够适应性的根据挡风玻璃上实际的雨水量调整雨刮片总成3的摆动速率及间隔时长,进而防止雨刷器干刮,从而提高雨刷器的寿命并保护了挡风玻璃,提高了雨刷器工作的智能性。
[0049]
预设摆动规则包括:
[0050]
将摩擦力采样值与判定区间组比较后得到判断结果,将雨刮片总成当前的工作策略更新为对应与判断结果对应的驱动策略。
[0051]
作为本发明的一种实施方式,将摩擦力分为不同的区间,并针对不同的区间制定对应的驱动策略,例如,当摩擦力落入到较大数值的区间时,说明雨水量较少,则可以降低雨刮片总成3的摆动间隔时长来避免干刷的问题,通过测得的摩擦力大小来适应性的采用不同的应对措施,进而提升了雨刷器工作的智能性。
[0052]
判定区间组包括第一判定组、第二判定组、第三判定组及第四判定组;
[0053]
第一判定组为:(0,f3);
[0054]
第二判定组为:[f3,f2];
[0055]
第三判定组为:(f2,f1];
[0056]
第四判定组为:(f1,+∞);
[0057]
其中,f1为前挡风玻璃上有雨水但不足以妨碍驾驶员视线时的摩擦力,f2为前挡风玻璃上有雨水且已经初步妨碍驾驶员视线时的摩擦力,f3为前挡风玻璃上有雨水且已经严重妨碍驾驶员视线时的摩擦力。
[0058]
作为本发明的一种实施方式,将判定区间组分为四个,分别为(0,f3),[f3,f2],
(f2,f1]及(f1,+∞),其中,f1、f2及f3分别为不同雨水量时雨刮片总成3所受到的摩擦力大小,此种判定组的划分方式能够满足不同雨量下摩擦力大小的划分。
[0059]
驱动策略包括:第一策略,第二策略,第三策略及第四策略;
[0060]
第一策略为:雨刷器距下一次摆动时间间隔缩短x秒;
[0061]
第二策略为:保持雨刷器当前的工作速率;
[0062]
第三策略为:雨刷器距下一次摆动时间间隔缩短y秒;
[0063]
第四策略为:雨刷器距下一次摆动时间间隔缩短z秒;
[0064]
其中,z>y。
[0065]
作为本发明的一种实施方式,当f∈(0,f3)时,说明雨量较大,因此缩短与下一次摆动的时间间隔,使得摆动的频率加快,当f∈[f3,f2]时,此时雨量不会影响驾驶员视野,因此保持雨刷器当前的工作速率,当f∈(f2,f1]时,说明雨量稍小,需要延长与下一次摆动的时间间隔来避免出现干刷的现象,当f∈(f1,+∞)时,说明雨量较小,需要进一步延长与下一次摆动的时间间隔来避免出现干刷的现象,进而实现雨刷器工作的智能性。
[0066]
作为本发明的一种实施方式,当摆动时间间隔>60秒时,说明雨量持续较小的水平,下雨终止,因此自动结束雨刷器的工作,减少驾驶员的主动操作,当摆动时间间隔≤3秒且f∈(0,f3)时,说明此时的雨量较大且雨刷器摆动的时间间隔已经处于较低的水平,因此,将雨刷器下一次摆动时间缩短0.5秒,当摆动时间等于0时,说明雨量持续较大,因此以高速挡位的速率进行摆动,可以及时的刮去雨水,因此,通过对雨刷器工作方式调整的方法,可以达到防止雨刷器干刮的目的。
[0067]
请参阅图1所示,本发明为一种防干刮智能雨刷器,包括雨刮片总成3和压力传感器6,压力传感器6用于获取雨刮片总成3摆动时所受的摩擦力,雨刮片总成3按照调整后的工作策略工作。
[0068]
通过压力传感器6来检测雨刮片总成3在对挡风进行刮水时受到的摩擦力,根据牛顿第三运动定律,雨刮片总成3受到的摩擦力与其对压力传感器6作用的压力相同,因此,压力传感器6检测的数值即为雨刮片总成3受到的摩擦力,根据摩擦力的大小来判断挡风玻璃上雨水的量,当雨量较小时,摩擦力较大,当雨量较大时,在雨水的润滑下雨刮片总成3受到的摩擦力会较小,因此,通过摩擦力的大小对雨刮片总成3采取不同摆动规则,进而能够适应性的根据挡风玻璃上实际的雨水量调整雨刮片总成3的摆动速率及间隔时长,进而防止雨刷器干刮,从而提高雨刷器的寿命并保护了挡风玻璃,提高了雨刷器工作的智能性,另外,压力传感器6的成本相比于雨量传感器或红外传感器较低,因此,本发明能够基于低成本提高雨刷器工作的智能性。
[0069]
还包括雨刮臂1;
[0070]
雨刮臂1的一端活动连接有雨刮片总成3;雨刮片总成3相对雨刮臂1在特定范围内摆动,雨刮臂1和雨刮片总成3之间设置有压力传感器6。
[0071]
作为本发明的一种实施方式,本发明的雨刮器结构还包括雨刮臂1,雨刮臂1的一端活动连接有雨刮片总成3,且雨刮片总成3相对雨刮臂1在特定范围内摆动,通过将雨刮臂1和雨刮片总成3之间设置有压力传感器6,进而能够实现对雨刮片总成3摆动时所受摩擦力的检测。
[0072]
雨刮臂1通过雨刮臂固定弯勾2与雨刮片总成3连接,雨刮片总成3的一侧设置有雨
刮片卡槽5,雨刮臂固定弯勾2固定在雨刮臂1的一端,雨刮臂固定弯勾2与雨刮片卡槽5相配合,压力传感器6设置在雨刮臂固定弯勾2的与雨刮片卡槽5内壁相接触的面上。
[0073]
作为本发明的一种实施方式,通过雨刮臂固定弯勾2及雨刮片卡槽5配合的方式,能够实现雨刮片总成3相对雨刮臂1在特定范围内摆动的效果,具体的,雨刮臂固定弯勾2勾住雨刮片卡槽5,进而能够保证雨刮臂与雨刮片总成连接点4的稳定,通过将压力传感器6设置在雨刮臂固定弯勾2的与雨刮片卡槽5内壁相接触的面上,因此在雨刮器摆动时,雨刮片总成3会通过雨刮片卡槽5挤压压力传感器6,进而实现对摩擦力的检测。
[0074]
压力传感器6外侧贴合有绝缘垫片7;
[0075]
绝缘垫片7的尺寸小于压力传感器6的尺寸,且绝缘垫片7采用低弹性材质。
[0076]
作为本发明的一种实施方式,在压力传感器6外侧贴合有绝缘垫片7,能够起到对压力传感器6进行保护的作用,避免雨刮片总成3长期作用于压力传感器6降低压力传感器6使用寿命的问题,将绝缘垫片7的尺寸设置的小于压力传感器6的尺寸,且绝缘垫片7采用低弹性材质,低弹性材质为弹性较小的材质,因此在保护压力传感器6的同时,还能保证压力传感器6测得数值的准确性,防止因绝缘垫片7导致压力传感器6受力不准的问题。
[0077]
请参阅图2所示,雨刮臂1内开设有导线孔8,通过导线孔8内的导线9,通过导线9连接压力传感器6及单片机。
[0078]
作为本发明的一种实施方式,导线9穿过导线孔8与薄膜压力传感器6引脚相连,保证了压力传感器6的稳定供电及数据传输,导线9的另一端与单片机引脚相连,保证供电与数据传输。
[0079]
请参阅图3所示,雨刮片总成3还包括胶条11、弹簧板12、卡扣13、保护壳14、固定盖子15及导流板16,其中,导流板16、弹簧板12及胶条11组合在一起,通过保护盖10防止其分开,卡扣13、保护壳14及固定盖子15共同组成雨刮片卡槽5与导流板16连接共为一体。
[0080]
请参阅图4所示,本发明中雨刮器的功能实现依靠压力传感器6、单片机、电机驱动模块、雨刷电机及电源模块的组成的系统完成,其中,电源模块为压力传感器6、单片机、电机驱动模块、雨刷电机供电,在压力传感器6测得摩擦力数值后,通过导线9传递给单片机,单片机再根据预设的方法通过电机驱动模快去控制雨刷电机,进而实现了雨刷器智能化的摆动控制。
[0081]
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1