空地一体移动侦查平台的制作方法
1.本发明涉及到侦查技术领域,特别涉及空地一体移动侦查平台。
背景技术:
2.我国的国境线较长,接壤国家多。近年来,随着无人机技术的发展与技术门槛的降低,边境低慢小入侵问题逐渐突出。在边境侦察应用中,受限于小型侦察无人机续航时间,工作时间短,侦察范围小。目前使用电池作为动力源的无人机充电时间较长,极大约束了无人机的作业效率。在边境侦查中,小型侦察无人机的电量补充有两种手段,一是需要返回固定站点进行充电,路途较远,耽误侦察工作进行,二是携带多块电池进行更换,由于无人机电池较重,对于人的负担较大。电池能量补充问题给边境对低慢小目标的侦察监视工作带来极大困难。
3.如申请号为202010119281.8、公开日为2020年6月12日的名称为《一种飞行侦察机器人和多球形移动侦察机器人的复合侦查系统》的中国发明专利,其系统具有空中广域侦察和地面集群式精细侦察特点。但多球形移动侦察机器人由于质量较大严重限制了空中侦察的范围。且多球形移动侦察机器人携带能源装置必定较小,支持其进行侦查任务时间必然短。
技术实现要素:
4.本发明为解决上述问题,本发明的目的在于提供便于充电的一种空地一体移动侦查平台。
5.为实现上述目的,本发明采用以下具体技术方案:
6.空地一体移动侦查平台,包括地面侦查车、无人机、车载总模块和无人机总模块;
7.地面侦查车用以承载无人机、车载总模块和无人机总模块;
8.车载总模块集成在地面侦查车上,无人机总模块集成在无人机上;
9.车载总模块包括车载充电模块,车载充电模块通过地面侦查车的发电机对车载充电模块充电;
10.无人机总模块包括为无人机提供电源的机载充电模块,车载充电模块对机载充电模块通过接触式充电方法进行充电,实现地面侦查车对无人机的充电。
11.进一步的,车载充电模块包括发电机、整流模块、充电平台、夹紧装置;
12.所述发电机用于输出交流电;
13.所述整流模块用于将经所述输出交流电整流为直流电,并输出至所述充电平台;
14.充电平台涂刷有正极标志与负极标志;
15.夹紧装置用以夹紧充电状态下的机载充电模块。
16.进一步的,机载充电模块包括充电架、正极脚、负极脚、电池、正极充电线、负极充电线;
17.正极脚和负极脚用作起落架且采用导电材料制成;
18.正极充电线的一端连接充电架的正极脚,正极充电线的另一端连接电池的正极;
19.负极充电线的一端连接充电架的负极脚,负极充电线的另一端连接电池的负极。
20.进一步的,无人机模块还包括机载视觉引导模块,机载视觉引导模块包括图像处理板和两个可见光相机;
21.两个可见光相机组成双目视觉系统,用以识别车载充电模块充电平台上的正极标志与负极标志的视觉信息,图像处理板根据视觉信息计算正极标志和负极标志对于无人机模块的相对位置与姿态信息;
22.无人机总模块根据相对位置与姿态信息调整无人机下降时的姿态与位置,使正极脚落在正极标志处,使负极脚落在负极标志处。
23.进一步的,充电平台包括正极导槽、负极导槽、正极充电区、负极充电区、降压模块和充电台本体;正极导槽和负极导槽分别位于充电台本体的两侧,正极导槽的一侧设置正极充电区,负极导槽的一侧设置有负极充电区;降压模块安装在充电台本体的一侧,用于将充电平台的电压变化为无人机电池所需要的充电电压。
24.进一步的,正极充电区和负极充电区设置有充电触点,充电触点与无人机的充电架进行连接。
25.进一步的,夹紧装置包括定位机构,定位机构分别安装在正极导槽和负极导槽中;定位机构包括x轴滑动组件和y轴滑动组件;
26.x轴滑动组件分别安装在正极导槽和负极导槽内;y轴滑动组件安装在x轴滑动组件的上方,并与x轴滑动组件滑动连接。
27.进一步的,x轴滑动组件包括:第一电机和x轴导轨,第一电机安装在所示x轴导轨上,第一电机用于驱动y轴滑动组件沿x轴方向移动;
28.y轴滑动组件包括:第二电机和y轴导轨,第二电机安装在所示y轴导轨上,第二电机用于驱动滑动块沿y轴方向移动。
29.进一步的,夹紧装置还包括锁紧机构,锁紧机构包括舵机、锁紧块、弹簧和调节手柄;舵机和锁紧块分别安装在y轴滑动组件的滑动块上;锁紧块为绝缘弹性材料;调节手柄安装在锁紧块上,弹簧位于调节手柄和锁紧块之间,弹簧用于增加锁紧块刚度。
30.进一步的,车载总模块包括车载探测模块、车载通信模块、车载数据处理模块和车载充电模块;
31.无人机模块包括机载数据处理模块、机载探测模块、机载通信模块和机载充电模块;
32.车载通信模块与机载通信模块相互通信,车载通信模块作为中转站以接收与转发控制中心所给出的命令;
33.车载探测模块包括雷达和光电经纬仪,车载探测模块用以对目标进行侦察、跟踪;
34.机载探测模块用以对目标进行侦察和跟踪;
35.车载数据处理模块处理由车载探测模块和机载探测模块分别获取的目标信息,车载数据处理模块分别向车载探测模块和机载探测模块发送跟踪指令;
36.机载数据处理模块用以调整无人机模块下降时的姿态与位置。
37.本发明能够取得以下技术效果:
38.本发明的一种空地一体移动侦查平台,具有监视范围广,定位精度高、机动灵活的
优点,无人机模块具有垂直起降能力,地面侦查车可引导无人机垂直降落,并对无人机模块进行接触式充电,极大扩大了侦查范围。有效地满足在各种复杂环境条件下对目标的长时间、大范围、高精度探测搜索、侦查识别等任务需求。
附图说明
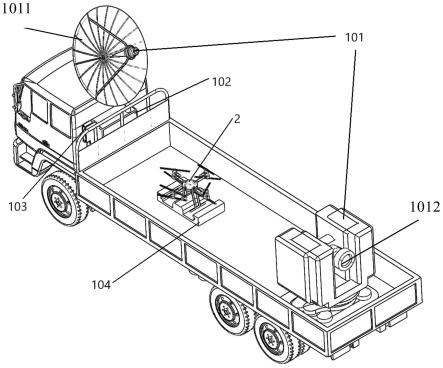
39.图1为本发明公开的空地一体移动侦查平台的结构示意图;
40.图2为本发明公开的无人机总模块的结构示意图;
41.图3为本发明公开的车载充电模块的整体结构示意图;
42.图4为本发明公开的车载充电模块的结构示意图;
43.图5为本发明公开的充电平台的结构示意图;
44.图6为本发明公开的定位机构的结构示意图;
45.图7为本发明公开的锁紧机构的结构示意图。
46.附图标记:
47.地面侦查车1、车载探测模块101、车载通信模块102、车载数据处理模块103、车载充电模块104、雷达1011、光电经纬仪1012、发电机1041、整流模块1042、变压模块1043、充电平台1044、夹紧装置1045、无人机总模块2、机载数据处理模块201、机载通信模块202、机载充电模块204、机载视觉引导模块206、正极脚2041,负极脚2042、电池2043、电池管理模块2044、正极充电线2045、负极充电线2046、第一可见光相机2051、第二可见光相机2052;
48.正极导槽1201、负极导槽1202、正极充电区1203、负极充电区1204、降压模块1205、充电台本体1206、定位机构130、单目相机1301、x轴导轨1302、y轴导轨1303、滑动块1304、第一电机1305、第二电机1306、锁紧机构140、舵机1401、锁紧块1402、弹簧1403和调节手柄1404。
具体实施方式
49.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
50.如图1所示的空地一体移动侦查平台,包括地面侦查车1、无人机、车载总模块和无人机总模块;
51.地面侦查车1用以承载无人机、车载总模块和无人机总模块;
52.车载总模块集成在地面侦查车1上,无人机总模块集成在无人机上;
53.车载总模块包括车载充电模块,车载充电模块包括发电机,发电机由地面侦查车1的发动机驱动;
54.如图2所示无人机总模块包括为无人机提供电源的机载充电模块,车载充电模块对机载充电模块通过接触式充电方法进行充电,实现无人机在地面侦查车1上的充电。无人机总模块2搭载机载数据处理模块201、机载通信模块202、机载充电模块204、机载探测模块,机载视觉引导模块206。无人机总模块2具备垂直起降能力,可进行小范围精确侦察任务。
55.地面侦查车1作为移动平台,用于承载车载总模块,地面侦查车1可以快速部署至
侦查区域,机动灵活。
56.与现有技术相比,该侦察平台通过地面侦查车1与无人机协同探测、定位与跟踪,且地面侦查车1可以对无人机进行充电,极大提升了侦查范围及侦查效率。
57.具体的,车载总模块包括车载探测模块、车载通信模块、车载数据处理模块和车载充电模块;地面侦查车1携带车载探测模块、车载通信模块102、车载数据处理模块103、车载充电模块104,并带载一个或多个无人机总模块2。车载探测模块包括雷达1011与光电经纬仪1012,用以执行大范围侦查作业。车载总模块和地面侦查车1进行地面侦察;无人机总模块和无人机进行空中侦察。
58.具体的,车载通信模块与后述的机载通信模块相互通信,车载通信模块作为中转站以接收与转发控制中心所给出的命令。车载通信模块包括调制解调芯片、功率放大芯片、信号处理芯片、电源芯片和天线端。示意性的调制解调芯片可以选择型号为semtech sx1278器件;功率放大芯片可选用ti公司的buf634a芯片;信号处理芯片可选用stm32f103器件;电源芯片可选为mic35302wd器件。电源芯片负责整流、变压,为车载通信模块供电。当车载通信模块接收信号时,天线端接收到机载通讯模块的信号,将信号传给调制解调芯片进行解码,将解码后的信号传给stm32f103信号处理芯片进行数据处理。当车载通信模块需要发送数据时,信号处理芯片收到车载数据处理模块的数据后,将其转发给调制解调芯片进行编码,然后通过功率放大芯片进行功率放大后由天线端发送信号至机载通信模块。
59.具体的,车载数据处理模块包括数字信号处理芯片、电源芯片和数字信号协处理芯片,其中数字信号处理芯片可选为tms320f28335;电源芯片可选为mic35302wd;数字信号协处理芯片可选为stm32f103。数字信号处理芯片负责对数据进行滤波、姿态解算、状态估计等任务,数字信号协处理芯片负责数据简单运算等任务,电源芯片负责整流、变压,为车载数据处理模块供电。
60.具体的,车载探测模块包括雷达、光电经纬仪,车载探测模块置于载车上。雷达和光电经纬仪可对大范围区域内的目标进行侦察、跟踪。
61.具体的,车载数据处理模块处理雷达、光电经纬仪和机载探测模块获取的目标信息,对目标进行立体探测,并向雷达、光电经纬仪、机载数据处理模块输出跟踪指令;探测是车载探测模块实现的,车载数据处理模块根据车载探测模块返回的图像信息进行数据解算,得到目标三维位置;
62.无人机总模块包括机载数据处理模块、机载探测模块、机载通信模块和机载充电模块;
63.机载探测模块用以对目标进行侦察和跟踪
,
对目标进行精细化侦察与跟踪。机载探测模块包括双目相机,可以是可见光双目相机,也可以是红外双目相机。机载探测模块与车载探测模块同样具有探测功能,但范围更广,精度更高。
64.机载数据处理模块根据机载探测模块返回的图像信息进行数据解算,得到目标的三维位置。
65.机载数据处理模块用以调整无人机总模块下降时的姿态与位置。机载探测模块,用以对小范围区域进行精确的目标侦察、跟踪,含偶数个可见光相机,该模块用以对大范围区域进行目标侦察、定位、跟踪,含偶数个可见光相机。如第一可见光相机2051和第二可见光相机2052构成一组双目系统,每组双目系统可以对探测目标进行三维定位,还可以把目
标图像通过机载通信模块202传输给车载数据处理模块103。
66.如图3所示的车载充电模块,车载充电模块104包括发电机1041、整流模块1042、变压模块1043、充电平台1044、夹紧装置1045。发电机1041由载车发动机驱动,置于载车1发动机舱后部,发电机1041输出交流电经整流模块1042与变压模块1043得到期望电压的直流电输入到充电平台1044,由充电平台1044向机载充电模块204进行供电。充电平台1044涂刷有正极标志与负极标志,用以辅助机载视觉引导模块引导无人机准确降落。夹紧装置1045用以夹紧机载充电模块的正极脚和负极脚,当无人机总模块未降落时,夹紧装置1045处于收回状态,当无人机总模块降落后,夹紧装置1045伸出,防止载车移动时无人机总模块剧烈晃动进而影响充电效果。夹紧装置采用绝缘材料制成。
67.机载充电模块包括机载充电模块包括充电架、正极脚2041,负极脚2042、电池2043、电池管理模块2044、正极充电线2045,负极充电线2046。正极脚2041和负极脚2042同时用作降落架,采用导电材料制成。正极充电线2044的一端连接充电架的正极脚2041,另一端连接电池2043的正极,另一根负极充电线2046的一端连接充电架的负极脚2042,另一端连接电池2043的负极。电池管理模块2044负责检测车载充电模块104与机载充电模块204是否连通,如果已连通,则开始充电,否则保持断路状态;同时管理电池充电时间,防止电池过冲。电池管理模块2044将充电信息实时反馈给车载充电模块104与机载充电模块204,以计算电池电量可支撑进行侦察任务的时间。
68.具体的,图4示出了车载无人机充电模块。如图4所示,充电平台1044可以通过现有技术的减振装置固定安装在地面侦查车上方,以隔绝地面侦查车在移动时产生的振动对充电平台1044的影响,保证充电平台1044处于水平状态。
69.优选的,减振装置包括若干个上连接板,下连接板和若干个支撑柱。上连接板和支撑柱的数量相同,示意性的为4个上连接板和4个支撑柱。下连接板安装在地面侦查车上,支撑柱均匀的安装在下连接板上,支撑柱的上端安装有上连接板。支撑柱采用小型液压缸,实现高度的无级调节。上连接板的上方安装有充电平台1044。
70.图3-5示出了充电平台的结构。如图5所示,充电平台1044包括正极导槽1201、负极导槽1202、正极充电区1203、负极充电区1204、降压模块1205和充电台本体1206。前述的正极标志与负极标志优选设置在充电台本体1206上。
71.正极导槽1201,负极导槽1202分别位于充电台本体1206的两侧,正极导槽1201的左侧设置有正极充电区1203,负极导槽1201的右侧设置有负极充电区1204;正极充电区1203和负极充电区1204均设置有正负充电标识用以引导无人机采用视觉方案降落。正极充电区1203与负极充电区1204设置有条状充电触点与无人机的充电架进行连接。降压模块1205安装在充电台本体206的一侧上,用于将发电机产生的直流电电压变化为无人机电池所需要的充电电压。降压模块的型号可选为:lm2596s dc-dc。
72.优选的,车载无人机充电模块还包括控制器,夹紧装置1045包括定位机构130和锁紧机构140,定位机构130分别安装在充电平台的正极导槽1202和负极导槽1203中。
73.如图6所示,定位机构130包括单目相机1301、x轴滑动组件和y轴滑动组件。x轴滑动组件包括x轴导轨1302、第一电机1305,y轴滑动组件包括y轴导轨1303、第二电机1306和滑动块1304。定位机构130为二维运动机构,参见现有技术。优选采用后述的结构。
74.x轴导轨1302分别安装在充电平台的正极导槽1202和负极导槽1203内。y轴导轨
1303安装在x轴导轨1302上,y轴导轨1303与x轴导轨1302之间为滑动连接。滑动块1304安装在y轴导轨1303上,滑动块1304与y轴导轨1303之间为滑动连接;x轴导轨1302的一端安装有第一电机1305,第一电机1305用于控制y轴导轨1303沿x轴方向移动。y轴导轨1303的一端安装有第二电机1306,第二电机1306用于控制滑动块1304沿y轴方向移动。单目相机1301安装在滑动块1304上,用于识别无人机充电架位置。
75.锁紧机构140安装在定位机构的y轴导轨1303上。如图7所示,锁紧机构包括舵机1401、锁紧块1402、弹簧1403和调节手柄1404。舵机1401和锁紧块1402分别安装在滑动块1304上,根据不同无人机的充电架大小,可通过手动调节调节手柄1404来调节锁紧块1402的锁紧程度。锁紧块1402为绝缘弹性材料。弹簧1403安装在调节手柄1404与锁紧块1402之间,弹簧1403用于增加锁紧块刚度。调节手柄1404安装在锁紧块1402的螺纹孔处,通过拧调节手柄404可以调节锁紧块1402的间隙,来适应不同大小的充电架。
76.控制器集成有加速度传感器,角速度传感器,用以感知车辆姿态变化。控制器安装在稳定平台的下连接板1102上。工作过程为:当地面侦查车停止时,降落在充电平台上,控制器发出信号使得单目相机1301沿着x轴导轨1302进行扫描,当扫描到无人机的充电架时,滑动块1304沿着y轴导轨1303进行移动,当移动到合适位置时,控制器控制舵机401旋转,舵机1401旋转带动锁紧块1402转动,对无人机充电架进行锁紧。当地面侦查车由行进状态转变为停止状态时,舵机1401旋转,转回锁紧块1402,解锁无人机充电架;当地面侦查车再次由停止状态转变为行进状态时,控制器检测加速度传感器的信号变化,控制舵机1401旋转,转出锁紧块1402,锁紧无人机充电架。
77.本发明提供的一种空地一体移动侦查平台,联合车载探测模块和机载探测模块可以对大范围侦察区域进行侦测、定位和跟踪,具有监视范围广,定位精度高,反应灵活的优点。无人机总模块同时具有垂直起降和高速平飞能力、侦查方式灵活、高效。发明采取以地带空的思路,地面侦查车可以做的很大,携带较多能源,方便为空中侦察平台提供能源补充。地面侦查平台完成粗侦查,由空中侦察平台进行精细侦查,且我们的空中侦察平台也具有垂直起降能力,可以在车上充电,可以多次作业,作业时间长,侦察范围广。
78.优选的,无人机总模块还包括机载视觉引导模块,机载视觉引导模块包括两个可见光相机与图像处理板。两个可见光相机组成双目视觉系统,可以准确识别车载充电模块充电平台上印刷的正极标志与负极标志的视觉信息,并将视觉信息传输给图像处理板,图像处理板经过运算得到正极标志与负极标志与无人机总模块的相对位置与姿态信息,将上述信息发送给机载数据处理模块,机载数据处理模块经过运算将指令信号发送给无人机总模块,调整无人机总模块下降时的姿态与位置,确保机载充电模块充电架的正极脚落在车载充电模块的正极标志处,机载充电模块充电架的负极脚,落在车载充电模块的负极标志处。
79.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结
合和组合。
80.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制。本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
81.以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1