穿戴式交通环境触觉感知辅助驾驶系统
1.本发明涉及辅助驾驶技术领域,具体为穿戴式交通环境触觉感知辅助驾驶系统。
背景技术:
2.随着汽车技术的发展,车辆安全性已经成为研究的热点,辅助安全系统或自动驾驶技术是当前汽车技术的主要研究方向。驾驶员在某些时刻需要全面感知周围环境的信息,这些道路环境信息一般是来自于人类感官的感觉,这就有非常大的局限性,受限于人的精力及视线等因素,很多信息难以有效地感知。
3.传统有人驾驶车辆在右后方等存在视觉盲区,即使是车辆后部等区域能够通过后视镜等观察,但由于人的精力有限,有时也难以观察到。
4.对无人驾驶汽车主要通过车载传感对行驶车辆的周围环境进行感知与识别,对获取的车辆位置、交通信号、道路以及障碍物等信息经分析处理,从而控制汽车的速度和转向。无人驾驶车辆虽说不需要人来决策,但并不代表人完全不参与,仍然需要安全员在驾驶环境变得复杂或情况紧急时适当介入,实现对自动驾驶车辆安全可靠性的有效监管,当车辆出现不安全行为时进行干涉。
5.目前市场上的车辆警示系统如语音和视频提示系统已经不能完全满足要求,如安全员处于走神状态,此时需要其他的提醒方式。触觉感知系统能够及时有效且多样地将信息传递给驾驶员或安全员,使车辆的行为能够得到人员的介入。本发明的“穿戴式交通环境触觉感知辅助驾驶系统”不仅可以用于无人驾驶时人机切换的一种提示作用,还可以用作辅助驾驶系统人类感官的拓展,使驾驶更加的高效和安全。产品可应用于有人驾驶车辆和无人驾驶汽车,使用车载传感器如雷达、摄像头等感知周围信息,辅助驾驶员通过触觉感知周围环境,提高车辆运行过程中的人机交互能力。
技术实现要素:
6.本发明的目的在于提供穿戴式交通环境触觉感知辅助驾驶系统,以解决上述背景技术中提出的问题:目前市场上的车辆警示系统如语音和视频提示系统已经不能完全满足警示要求。本发明的目的是为了让自动驾驶中遇到更加复杂的情况时更直观提醒驾驶员切换手动驾驶,并且让驾驶员通过触觉更加直观的感受视野盲区的物体位置。
7.为实现上述目的,本发明提供如下技术方案:
8.穿戴式交通环境触觉感知辅助驾驶系统,包括:
9.车辆ecu模块,用于获取外界环境数据;
10.触觉执行器,用于以触觉方式警示驾驶员;
11.触觉感知控制单元,用于与所述车辆ecu模块连接,得到外界环境信息后做出决策并控制触觉执行器。
12.进一步有优选的,所述外界环境数据包括:
13.所检测目标物体的空间位置、与车辆的相对位置和速度。
14.进一步有优选的,所述触觉执行器为一采用栅格分布的气囊组、空气压缩机和蓄压器,所述气囊组包括若干个气囊;
15.所述空气压缩机与所述触觉感知控制单元连接,且所述空气压缩机输出端与所述蓄压器连接,所述蓄压器与所述气囊连接。
16.进一步有优选的,所述触觉执行器包裹在穿戴式贴身马甲中或者安装在座椅靠背中,且对应分布包裹在人体的整个背部和两腰侧。
17.进一步有优选的,每个气囊上均安装有压力控制电磁阀,且所述压力控制电磁阀采用三位电磁阀,分别控制着气囊的保压、加压和泄压。
18.进一步有优选的,所述触觉执行器为偏心滚轮组,其通过电机驱动转动,所述电机与触觉感知控制单元连接。
19.进一步有优选的,所述触觉感知控制单元得到外界环境信息后做出决策并控制触觉执行器的方法如下:
20.在所述触觉感知控制单元设置有一危险程度阈值δ,当危险程度大于等于阈值δ时,给触觉执行器发出相应动作指令;
21.危险程度阈值δ取决于本车和所检测物体的相对位置x
δ
和相对速度v
δ
,确定规则如下:
22.对于同车道后危险因素,当相对速度小于等于100km/h时,开始提示距离阈值为:
23.δτ=ds+(0.2+αt)vm24.式中δτ为提示阈值,ds为安全距离,t为驾驶员反应时间,vm为相对速度,0.2为提前提示系数;
25.当相对速度大于100km/h时,速度相对100km/h每增加n%,则提前提示系数为0.2+n%,此时提示阈值为:
26.δτ=ds+(0.2+n%+αt)vm27.式中δτ为提示阈值,ds为安全距离,t为驾驶员反应时间,vm为相对速度;
28.对于后侧方向来车危险因素,设自车为a车,速度为va,ψ为传感器所能探测的有效范围;设后方移动物体速度为v1,其与a车的相对速度角度为α,横纵向车距以x1表示,可得到如下关系式:
[0029][0030]
式中t为时间,当存在实数解时表示在某一刻两物体会相冲撞,考虑到驾驶员有一点的应急能力,有一个安全反应时间c,当t《c也满足安全条件,故当存在一个纵向距离x1使上式的解0《t《c,触觉感知控制单元提示驾驶员。
[0031]
与现有技术相比,本发明的有益效果是:
[0032]
1、本发明是通过自动驾驶车辆传感器融合的数据来执行动作,调用车辆自带设备,不需要外加其他传感器,结构简易。
[0033]
2、本发明采用直观压力触觉提醒驾驶员其他物体的方位和距离,不但能用于辅助驾驶和自动驾驶人机切换提示,还可以用于无视觉的紧急情况驾驶。
[0034]
3、本发明使用了分布式压力触觉执行器,得到的触觉感知更加准确。其中穿戴式背心使用起来更方便,而且具有保护人体作用。
附图说明
[0035]
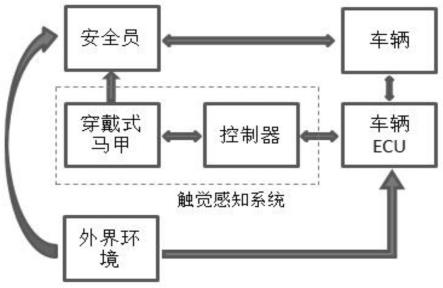
图1为本发明系统结构示意图;
[0036]
图2为本发明危险感知控制器逻辑示意图;
[0037]
图3为本发明的穿戴式设备的增压机构示意图;
[0038]
图4为后侧方向来车示意图。
具体实施方式
[0039]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0040]
本穿戴式交通环境触觉感知设备,进行提示自动驾驶和手动驾驶切换或辅助手动驾驶。
[0041]
其中,车辆ecu能够计算出所检测目标物体的空间位置x和与车辆的相对位置xδ以及速度vδ。触觉感知控制单元得到外界环境信息后做出决策并控制触觉执行器。触觉执行器采用一个栅格分布的气囊组(或者偏心滚轮组等同理),包裹在穿戴式贴身马甲中或者分布在座椅靠背。气囊组中每一个根据外界环境的变化产生不同的压力(当是滚轮时为转速)差对人体进行挤压作用,人体根据压力的位置和强度能感知车外物体的大致位置。触觉感知控制单元采用物体位置对应气囊峰值压力的原理。
[0042]
其中ecu所得到的检测物体的相对位置信息是根据自动驾驶算法传感器融合过后的车辆和外界环境的关系信息,本发明不涉及传感器融合算法。
[0043]
穿戴式交通环境感知系统的的触觉感知单元(控制器)接收到ecu传递的信息,进行决策和判断并且直接控制执行机构(气囊组)。其中触觉感知控制单元有一个危险程度阈值δ,当危险程度大于阈值δ时给执行器发出相应动作指令(即开始提示安全员所检测的危险障碍的距离和相对位置以及速度)。危险程度阈值取决于本车和所检测物体的相对位置x
δ
和相对速度v
δ
。当相对速度越大也就是说安全距离需要更大(阈值越小)则为了保证安全本系统阈值δτ确定规则如下:
[0044]
1)对于同车道后危险因素:当相对速度小于等于100km/h时,开始提示距离阈值为:
[0045]
δτ=ds+(0.2+αt)vm[0046]
式中δτ为提示阈值,ds为安全距离,t为驾驶员反应时间,vm为相对速度。0.2为提前提示系数.
[0047]
当相对速度大于100km/h时为了考虑高速的不可控性,需要更加超前的提示,速度相对100km/h每增加n%则提前提示系数为0.2+n%。此时提示阈值为:
[0048]
δτ=ds+(0.2+n%+αt)vm[0049]
根据《中华人民共和国道路交通安全法》安全车距在数字上等于车速,可以大致得到以下表格:
[0050]
车速km/h安全距离/m提示阈值/m警告阈值/m160160201.6160
1201201461201001001201006060726040404840
ꢀꢀꢀꢀ
[0051]
2)对于后侧方向来车如图所示:图中a为自车速度为va,ψ为传感器所能探测的有效范围,后方来车用五角星表示,速度和方向如图4所示。
[0052]
以后方移动物体v1为例,其与a车的相对速度角度为α,横纵向车距以 x1表示。可得到如下关系式:
[0053][0054]
式中t为时间,当存在实数解时表示在某一刻两物体会相冲撞,但考虑到驾驶员有一点的应急能力,有一个安全反应时间c,当t<c也满足安全条件。当存在一个纵向距离x1使上式的解0<t<c,系统提示驾驶员。
[0055]
本发明穿戴式马甲结构:栅格分布的气囊组分布包裹再人体的整个背部和两腰侧,每个气囊单元在工作时都会有不同的压力,其拥有峰值压力的气囊单元对人体挤压作用最为明显,这个单元的分布位置与探测物体的相对位置相对应。则人体能直观感受到被探测物体的方位。
[0056]
穿戴马甲内还包括一个空气压缩机,一个低压蓄压器,一个压力控制器,多个开关阀调节每个压力单元的压力大小,并且反馈给控制器。该设备还能根据每个人对触觉的敏感程度调节初始压力值。
[0057]
参阅图1,可知本发明的触觉感知系统是将传感器和人的触觉相结合。在自动驾驶时车辆的外界环境感知和车辆动作执行基本上是由车辆的ecu直接控制。交通环境触觉感知系统作为传感器和人体触觉感官的纽带,当ecu接受到外界环境数据时判断是否有危险发生的可能性,通过传感器数据融合如果计算出有危险情况,则唤醒触觉感知系统的控制器,并将处理过后的外界信息传达给它。当触觉感知系统的控制器接受到外界危险物体的位置信息后进行危险程度和方向位置判断,然后根据所计算出的控制量输出到触觉感知系统的执行器(这里以触觉感知穿戴马甲为例)。本系统控制器控制执行器包括空气压缩机,和各个气囊的开关阀,通过调节气囊的气压得到不同的触感让人和车合二为一,更加直观的感受外界信息以便于驾驶员决策出更加安全驾驶动作。
[0058]
根据图2,为触觉感知系统控制器逻辑图,控制器接受模块得到外界环境数据后首先判断所检测为危险因素是来自后方同车道还是侧方来车。若为后方同车道来车,判断是否不在安全距离之内,若不在安全范围之内触觉感知提示模块开始,接受外界环境信息(外界危险物体的位置)直接触发触觉感知提示;如果为侧方位来车则判断是否能在安全反应时间中相交,若不能得到安全反应时间同样触发触觉感知提示。
[0059]
图3中展示了触觉感知系统的执行机构结构原理。如图所示当控制器接受到由车辆ecu发送的唤醒提示和外界环境信息后,触觉感知控制器作用于空气压缩机给蓄压器充压使供压管道处于一个相对稳定的高压,当然这个压力对于人来说是非常安全的。控制器接受来自气囊的压力反馈后根据目标压力控制电磁阀动作。此处采用一个三位的电磁阀,
分别控制着气囊的保压,加压和直接向大气泄压。
[0060]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0061]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1