一种用于提高动态无线充电效率的线圈结构及控制算法
1.本发明涉及无线充电技术领域,特别是一种用于提高动态无线充电效率的线圈结构及控制算法。
背景技术:
2.随着国家政策的推动,能源绿色转型已是大势所趋,从在仓储仓库使用的小型电动搬运车、港口码头采用大载重量的电动拖挂车到新能源汽车,这些运输工具都以电池为动力来源。虽然电动车辆具有较多的优点,但是受到续航能力及充电限制,因此相较于燃油车等来说,还是存在较大的缺点。
3.在设施较为先进的生产或者物流领域中,为了实现电动搬运车等(以下简称电动车辆)的连续工作及充电需要,会在电动车辆经过的路径下每间隔一段距离安发射端初级线圈(以下简称发射线圈),在电动车辆上安装一个接收端耦合线圈(以下简称接收线圈),这样电动车辆在运动的同时就能不断获得电能进行工作或为蓄电池充电(接收线圈接收到发射线圈发出的能量后,通过谐振整流电路、dc-dc转换电路等作用输出直流电为电动车辆供电,电源转换工程中,数据采集电路采集输入及输出电源的数据到控制电路,进而控制电路输出不同占空比信号到dc-dc转换电路,控制dc-dc转换电路的输出功率),减少了电动车辆停止运动充电对工作造成的影响。虽然上述方式克服了电动车辆必须静态充电的缺点,但是由于电动车辆接收端只具有一个线圈,在接收线圈通过发射线圈间距的过程中,互感值会下降到很低,无法保证输出功率的稳定,而如果采用减少每两个发射线圈的间距方法克服互感值降低的问题,但是当发射线圈间距较小时,又会存在接收到两个发射端不同谐振点能量的问题,同样也会造成较大的能量损耗。再者,现有的控制电路由于内部的软件单元计算程序(也就是控制算法)是基于电动车辆上搭载一个接收线圈作为基础,因此,无法有效解决在动态充电过程中,输出到负载(电动车辆上的电机及蓄电池等等用电设备)的能量的可控及稳定性,对电动车辆的稳定工作会造成不利影响。综上所述,提供一种能提高电动车辆动态充电效率,且能保证控制电路控制dc-dc转换电路输出电源功率稳定的线圈结构及控制算法显得尤为必要。
技术实现要素:
4.为了克服现有电动车辆由于结构所限,在动态充电中存在充电效率不高的缺点,以及控制电路的算法无法有效解决在动态充电过程中,输出到负载的能量可控及稳定性,对电动车辆的稳定工作会造成不利影响的弊端,本发明提供了将电动车辆上的接收线圈、采用与原电路lcc谐振拓扑并联结构的并联两个双d型线圈,能满足电动车辆在运动过程中,保证原副边线圈(发射线圈和接收线圈)之间一直有较稳定的互感值,实现了发射端的所需最低功率传输,再结合控制电路采用的pi结合无源控制算法,既能保证电动车辆在运动过程中动态充电,且还能给负载电池提供持续稳定充电功率的一种用于提高动态无线充电效率的线圈结构及控制算法。
5.本发明解决其技术问题所采用的技术方案是:
6.一种用于提高动态无线充电效率的线圈结构,包括发射线圈和接收线圈;其特征在于所述发射线圈由两个长矩形线圈组成的双d型线圈构成,并在线圈下方铺设了多条磁芯,电动小车经过的地面每间隔一定距离铺设一套发射线圈,每两套发射线圈的间距为一个发射线圈的宽度;所述接收线圈是两个正方形线圈组成的双d型线圈,并具有两条磁芯,每台电动车辆上安装两个接收线圈,两个接收线圈的间距为一个接收线圈的宽度。
7.进一步地,所述发射线圈和电动车辆充电配套的发射端电源输出端电性连接。
8.进一步地,所述接收线圈和电动车辆上的谐振整流电路的电源输入端电性连接。
9.一种用于提高动态无线充电效率的控制算法,其特征在于包括如下步骤,步骤a:确定控制计算基础的平均微分方程,方程为步骤b:对电动车辆接收端外环的dc-dc转换电路的输入电压控制采用pi控制算法计算,具体公式为,
10.步骤c:对电动车辆接收端内环的dc-dc转换电路的输出功率pwm波形控制,采用公式计算。
11.进一步地,所述步骤a中,c
d1
、c
d2
和l分别代表的是dc-dc转换电路的控制电路前端电容、后端电容和电感,u
cd1
、u
cd2
、i
l
和i
in
分别代表的是控制电路前端电容器的电压、后端电容器电压、电感器电流和输入电流,d为控制电路igbt的占空比,r是电路的输出负载电阻值。
12.进一步地,所述步骤b中,是给定控制电路的前端电压值,u
cd1
为实际测量值,e(t)为偏差值,pi控制算法的比例积分参数分别是k
p
和ki,比例积分控制的输出量就是无源控制所需要的输入电流、标记为其中要小于限制所需要的电流的最大值im。
13.进一步地,所述步骤c中,u
cd1
和u
cd2
分别为buck电路输入电压和输出电压,为无源控制算法的给定电流,i
l
为buck电路中电感的电流,其中d为buck电路igbt的占空比,r是电路的虚拟阻抗。
14.本发明有益效果是:本发明将电动车辆上的接收线圈、采用与原电路lcc谐振拓扑并联结构的并联两个双d型线圈,能满足电动车辆在运动过程中,保证原副边线圈(发射线圈和接收线圈)之间一直有较稳定的互感值,实现了发射端的所需最低功率传输,再结合控制电路采用的pi结合无源控制算法,可以使得输出负载的能量可控且输出到负载的电流是平稳状态,既能保证电动车辆在运动过程中动态充电,且还能给负载电池提供持续稳定充电功率。本发明还可以扩展到其他不同功率等级的动态无线充电系统上使用。基于上述,所
以本发明具有好的应用前景。
附图说明
15.以下结合附图和实施例将本发明做进一步说明。
16.图1是现有的电动车辆应用的动态无线充电系统架构框图。
17.图2是现有的电动车辆应用的动态无线充电系统的lcc补偿电路图。
18.图3是本发明采用的结构示意图。
19.图4、5、6是现有技术中采用的几种线圈结构示意图。
20.图7、8、9是对几种线圈进行的电磁仿真互感值对比图。
21.图10是动态无线充电系统的拓扑结构图。
具体实施方式
22.图3中可见,一种用于提高动态无线充电效率的线圈结构,包括发射线圈和接收线圈;所述发射线圈由两个长矩形线圈组成的双d型线圈构成,并在线圈下方铺设了9条50mm宽350mm长的磁芯,电动小车经过的地面每间隔一定距离铺设一套发射线圈(动态无线充电长导轨发射端),每两套发射线圈的间距为一个发射线圈的宽度;所述接收线圈是两个正方形线圈组成的双d型线圈,并具有两条磁芯,每台电动车辆上安装两个接收线圈,两个接收线圈的间距为一个接收线圈的宽度。发射线圈和电动车辆充电配套的发射端电源输出端经导线连接。接收线圈和电动车辆上的谐振整流电路的电源输入端经导线连接。
23.图1中可见,现有的电动车辆应用的动态无线充电系统由多个原边发送控制箱、发射线圈(结合其他必要电路构成发射端能量发送设备)及接收端的接收线圈、谐振补偿电路和采样控制电路等多部分组成。在动态无线充电系统中,多套发射端能量发送设备(包括发射线圈)按照特定的组合方式构成,在每套原边能量发射设备中,需要调节配套电路的逆变器开关管开关频率使其等于系统的谐振频率产生相应的谐振激励信号、以使接收端能接收能量,而系统的发射端及接收端谐振频率取决于其补偿电路与耦合线圈(发射及接收线圈)的谐振电路参数。工作时,发射线圈中的高频交流电产生磁场,接收端线圈接收到后将磁场转化成高频交流电,接收端的整流电路将谐振电路传过来的高频交流电转换成直流电,dc/dc电路用于控制系统功率及提升系统效率,最后能量传输给负载(电池组)。
24.图2所示,现有的电动车辆应用的动态无线充电系统的发射端及接收端谐振补偿电路,传输给负载的能量如公式公式中,其中l1和l2是发射线圈和接收线圈的自感;l
f1
、c
f1
和c
p1
是发射端的谐振电感和补偿电容,而l
f2
、c
f2
和c
p2
是接收端的谐振电感和补偿电容;m是两个线圈之间的互感;u
ab
是发射端进入补偿网络的电压;u
ab
是接收端整流电路之前的谐振系统输出电压;i1、i2、i
lf1
、l
lf1
是流过l1、l2、l
f1
、l
f2
的电流;k是发射和接收线圈的耦合系数。从公式(1)可以看出,输出到负载的能量和耦合系数k成正比,如公式lm=k
·
l1所示耦合系数和互感成正比,实际情况下,如果其它参数不变的情况下,发射线圈和接收线圈互感越大,那么耦合系数就越大,传输到负载的能量就越高。综上所述,在满足电路设计参数的情况下,能够在动态充电过程中,提高发射和接收线圈之间的互感值,也就能保证传输到负载的能量稳定。根据上述原理,如图3所示,本发明提
出了一种用于提高动态无线充电效率的线圈结构。
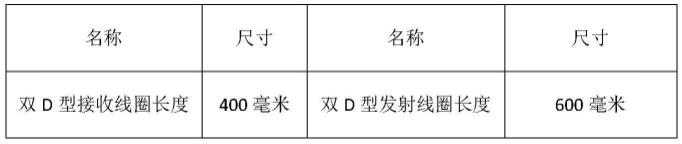
25.图4、5、6是现有技术中采用的几种线圈结构,本实施例对其采用ansys电磁仿真实验做了仿真对比。图4所示的是当下很多动态无线充电采用的线圈结构,发射和接收线圈都采用双d型线圈,发射线圈间距为一个线圈的宽度,接收端采用一个双d型接收线圈;图5所示,设定接收端依然采用一个双d型接收线圈,而发射端采用双d型长导轨式线圈结构,发射线圈之间间距为一个接收线圈的宽度;图6所示,设定接收端采用两个矩形接收线圈,发射端采用矩形长导轨式线圈结构,发射线圈之间间距为一个接收线圈的宽度。所有线圈的长度、宽度、线圈间距及其配套的磁条长度、宽度、间距、厚度和线圈绕制匝数、励磁线型号数据如下表所示。
26.表1发射接收及线圈的尺寸表
[0027][0028][0029]
对上述不同类型的线圈结构,通过ansys电磁仿真实验后,仿真实验的互感结果如图7、8、9所示。图7是对图4和图5线圈结构的电磁仿真互感值对比图,两者采用同样的双d型单接收线圈,发射线圈分别为双d型传统发射和双d型长导轨发射线圈,从仿真图可以看出单接收线圈结构,发射和接收互感波动比较大,这样如果应用该结构很难保证接收端有稳定的输出功率。同时也可以对比得到,发射端为长导轨的结构,接收线圈在长导轨的上方时,有一段比较稳定的互感;图8是图3(本发明)和图6线圈结构的电磁仿真互感值对比图,两者采用同样尺寸的长导轨发射线圈和双接收线圈,线圈结构分别为双d型和矩形,从仿真图可以看出,首先双d型线圈结构的互感值会更大,就说明传输能量会更高,其次两种结构在动态仿真过程中都有一定的波动,但采用双d型线圈结构,波动幅度比较低,且最低的互感值比较大,这样通过对接收端控制电路采用相应的算法控制,就能保证接收端有稳定的
输出功率。图9对图3、4、5、6中,采用不同发射及接收线圈结构互感值归一化处理后对比图,从仿真图中可以清晰的看出本技术设计的线圈结构动态互感值,即黑色曲线的结果,波动幅度最小,且最低值最大,这样的线圈结构,再通过接收端相适应的控制电路控制,能让电动车在运动过程中,给负载输出稳定的功率。
[0030]
图3、4、5、6、7、8、9所示,总的来说,从线圈电磁仿真实验结果可以看出,采用单个接收线圈的时候,无论发射端是一般的双d型线圈还是长导轨式,在接收线圈通过发射线圈间距的过程中,互感值都会下降到很低,无法保证输出功率的稳定,如果采用减少发射线圈的间距方法,但是当发射线圈间距较小时,存在接收端接收到两个发射端不同谐振点的能量问题,这样也会造成较大的损耗。通过对比,发射端采用长导轨式,接收端为双接收线圈,但单个线圈结构分别为双d型和矩形的时候,可以看出,采用双d型线圈在动态仿真过程中互感的波动幅度会小很多,而矩形线圈波动过大,但如果长导轨式发射线圈长度过大的话,损耗也会比较大,本发明因此选择了中等长度的单个发射端导轨,轨道长度为三个接收线圈的长度,如图3所示,单个发射端轨道可以单独开启关闭,当装有发射线圈的车辆要进入每个发射导轨时开启线圈,完全离开后关闭线圈,这样的设计即解决了在动态过程中互感的稳定,也尽量降低了源边线圈的损耗。
[0031]
图3、4、5、6、7、8、9所示,本发明优化了发射端和接收线圈的结构之后,为了实现稳定的功率输出,还需要在接收端谐振补偿和整流电路之后加上buck控制电路(buck电路即降压斩波电路、本发明所有内容控制电路代表buck电路),才能使输出到负载的电流可控且平稳。本发明中,动态无线充电系统的buck控制电路的拓扑结构如图10所示,在忽略了寄生参数的情况下,得到描述状态平均模型的微分方程为:公式里的c
d1
、c
d2
和l分别代表的是buck电路的前端电容、后端电容和电感;u
cd1
、u
cd2
、i
l
和i
in
分别代表的是buck电路前端电容器的电压、后端电容器电压、电感器电流和输入电流;d为buck电路igbt的占空比;r是电路的输出负载电阻值。对于电动车辆接收端外环的dc-dc转换电路的输入电压控制采用pi控制算法计算,公式如下,公式里的是给定的buck电路的前端电压值;u
cd1
为实际测量值;e(t)为偏差值;pi控制器的比例积分参数、分别是k
p
和ki;比例积分控制的输出量就是无源控制所需要的输入电流标记为其中一定要小于限制所需要的电流的最大值im。对电动车辆接收端内环的dc-dc转换电路的输出功率pwm波形控制,采用公式计算,其中u
cd1
和u
cd2
分别为buck电路输入电压和输出电压,为无源控制算法的给定电流(本文中为pi控制电路的输出值),i
l
为buck电路中电感的电流(是buck电路的输出电流,即输出给负载的电流),d为buck电路igbt的占空比,r是电路的虚拟阻抗。通过上述技术方案,经仿真和搭建的实际电路都验证了buck电路上的pi结合无源控制算法,可以使得输出负载的能量可控且输出到负载的电流是平稳的。
[0032]
本发明中,动态无线充电长导轨发射端和lcc并联接收端的线圈结构可以提高电动车辆动态运动过程中的充电功率;在动态无线充电长导轨发射端和lcc并联接收端的线圈结构可以保持发射线圈和接收线圈的互感相对稳定,也就可以保证接收端输出到负载功率的稳定,并能满足电动车动态运动过程中恒流充电的要求;动态无线充电的长导轨发射端和lcc并联接收端的线圈结构,可以扩展到其他不同功率等级的动态无线充电系统上使用;为动态无线充电设计的pi结合无源控制算法,可以很好的解决现有技术在动态充电过程中存在的问题,保证了输出到负载的能量有一定的可控性,且输出到负载的电流稳定。
[0033]
以上显示和描述了本发明的基本原理和主要特征及本发明的优点,对于本领域技术人员而言,显然本发明限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
[0034]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1