用于人工智能机器人的智能储存结构
1.本发明涉及智能机器人储存技术领域,特别涉及用于人工智能机器人的智能储存结构。
背景技术:
2.智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段;目前,机械装备制造企业信息化已完成手工电子化办公的跨越,企业信息化已实现各业务系统互联互通,智能机器人应用广泛,在现在的生活中随处可见,例如车间上料机器人、无人售货机器人、探测机器人和餐厅传菜机器人等,其中,传菜机器人可以按照预先制定好的路线,按指令端盘送餐到指定桌台,发出语音提示后由顾客或者服务员将餐盘转移到餐桌,常见的餐厅用传菜机器人由于应用在食品行业,因此需要对传菜机器人进行频繁消毒,充电和清洁,从而保证所传菜品的卫生安全。
3.然而,就目前传统传菜用智能机器人而言,机器人在进行充电时,需要人工接入电源,或自行移动至充电区域自动接入电源,而机器人在进行充电期间,受到外力碰撞或推动,容易引起充电中断,且充电过程中容易受到周边环境的污染,机器人缺少保护装置,不能合理的利用充电期间进行消毒、清洁。
技术实现要素:
4.有鉴于此,本发明提供用于人工智能机器人的智能储存结构,其专对智能机器人设置了储存结构,提供智能机器人的充电、消毒区域,并对智能机器人进行转移、密封储存,保证机器人充电或停用期间的稳定放置,起到保护作用,密闭储存期间可以避免外界环境中的灰尘等杂质掉落,通过储存结构内部的平移组件的作用,可实现对机器人底部消杀的功能,并提高了机器人与充电组件之间的接触稳固性。
5.本发明提供了用于人工智能机器人的智能储存结构,具体包括:储存箱体;所述储存箱体的两侧分别设有一处侧箱板;密封前板,所述密封前板设有两处,两处密封前板分别滑动连接在储存箱体的前方两侧;平移支座,所述平移支座设有两处,两处平移支座分别活动连接在两处侧箱板内侧;升降支座,所述升降支座设有两组,两组升降支座分别滑动连接在两组平移支座上;电动螺旋推缸,所述电动螺旋推缸设有两处,两处电动螺旋推缸的主体分别通过螺钉固定连接在平移支座上,且两处电动螺旋推缸的输出推杆分别固定连接在两处升降支座上表面;链条推进机构,所述链条推进机构设有两组,两组链条推进机构的链条分别固定连接两组平移支座;推进驱动件,所述推进驱动件设有两处,两处推进驱动件分别固定连接在两处侧箱板的内表面上,且推进驱动件连接并驱动链条推进机构;所述储存箱体的内部后壁下端固定连接有两处紫外线消毒灯;臭氧发生器,所述臭氧发生器固定连接在侧箱板的内表面上;充电接座,所述充电接座固定连接在储存箱体的内部上方;控制面板,所述控制面板通过螺钉固定连接在左侧的侧箱板的外表面上,且控制面板电性连接两
处推进驱动件、两处电动螺旋推缸、紫外线消毒灯和臭氧发生器。
6.可选地,所述储存箱体的上板前方通过折弯加工有上导向折板,上导向折板后方滑动连接有密封前板。
7.可选地,所述侧箱板的内表面上固定连接有一处侧板导杆,侧板导杆朝向前后方向设置,侧板导杆的截面为双圆头矩形结构,侧箱板的底部向内加工有折板结构,且侧箱板的底板上表面固定连接有侧板支杆,侧箱板上固定连接有两处紫外线消毒灯,两处紫外线消毒灯分别设置在臭氧发生器的上方和下方。
8.可选地,所述密封前板的后表面下侧固定连接有一处前板推进齿条。
9.可选地,所述平移支座的上方固定连接有一处导向上筒,导向上筒的内筒体截面为双圆头矩形结构,且导向上筒滑动连接在侧板导杆上,平移支座的下端固定连接有一处矩形的滑动台座。
10.可选地,所述滑动台座的下表面上固定连接有五处支承混子,且滑动台座的上表面外边缘位置固定连接有一处链体夹块,链体夹块通过螺栓顶紧连接链条推进机构的链条。
11.可选地,所述升降支座上开设有两处矩形通孔结构的升降导孔,升降支座的下方向内设置有两处抬升楔脚。
12.可选地,所述抬升楔脚的内上方开设有楔形面。
13.可选地,所述链条推进机构包括有主动链轮、从动链轮和连接链条,主动链轮和从动链轮的轴体分别转动连接在侧箱板底板上表面的后侧和前侧,且主动链轮和从动链轮通过连接链条形成链传动,主动链轮的轴体上端连接推进驱动件的转轴。
14.可选地,所述链条推进机构前方的从动链轮的轴体上固定连接有一处闭锁从动齿轮,闭锁从动齿轮位于从动链轮的下方,闭锁从动齿轮啮合连接前板推进齿条。
15.有益效果根据本发明的各实施例的智能机器人储存结构,与传统智能机器人的使用方式相比,其专对智能机器人设置了储存结构,提供智能机器人的充电、消毒区域,并对智能机器人进行转移、密封储存,保证机器人充电或停用期间的稳定放置,起到保护作用,密闭储存期间可以避免外界环境中的灰尘等杂质掉落。
16.此外,通过储存结构内部的平移组件的作用,通过电动螺旋推缸和升降支座的配合,通过电动螺旋推缸收缩可以平稳提高升降支座的高度,并通过平移支座对升降支座导向的作用,使升降支座平稳且垂直上移,通过抬升楔脚将智能机器人底部从两侧进行抬升,使机器人上方的充电接口与储存结构带有的充电座平齐,有效提高了机器人充电时的接触稳固性,抬升后的智能机器人底部脱离地面,通过紫外线照射实现对机器人底部消杀的功能,还可以避免地面不良因素如地面积水、地面有杂物对机器人的底部轮体造成干扰或污染,机器人通过自身移动进入储存装置,全程平稳,并且抬升组件通过对机器人的底座平稳垂直抬升,使机器人抬升全程保持平稳、直立状态,降低颠簸,可以避免传统的机器人进入充电座或储存装置的过程不稳定造成的机器人颠簸或倾斜的情况。
17.此外,通过推进驱动件对链条推进机构进行驱动,带动主动链轮转动,而后通过链条连接从动链轮,形成链传动机构,链条推进机构的链条内侧通过链体夹块固定连接平移支座,从而带动平移支座实现前后平移,通过前后平移机器人控制机器人充电口与充电接
座的连接通断,控制机器人进行充电,当平移支座带动抬升后的机器人向储存装置内部进行移动时,闭锁从动齿轮在从动链轮轴体带动下进行旋转,通过两侧的闭锁从动齿轮与两组前板推进齿条之间的齿轮齿条传动效果,带动两侧的密封前板向中间移动,实现对储存装置闭锁的效果,在机器人向储存装置内部推进的过程中,与闭锁结构联动,实现了储存装置自动闭锁的功能,有效的对内部机器人进行保护,并可以避免消毒过程中臭氧和紫外线泄露的情况。
附图说明
18.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
19.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
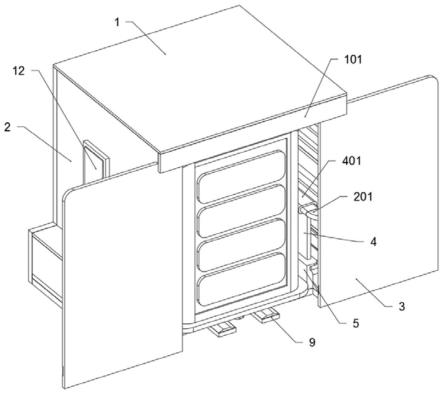
20.在附图中:图1示出了根据本发明的实施例的智能机器人储存结构的整体结构的示意图;图2示出了根据本发明的实施例储存结构底部的示意图;图3示出了根据本发明的实施例储存箱体内部的示意图;图4示出了根据本发明的实施例智能机器人储存结构内部的示意图;图5示出了根据本发明的实施例侧箱板内表面的示意图;图6示出了根据本发明的实施例升降支座的示意图;图7示出了根据本发明的实施例链条推进机构的整体示意图;图8示出了根据本发明的实施例储存状态下的示意图;图9示出了根据本发明的实施例密封前板及其驱动结构的示意图;图10示出了根据本发明的实施例图9的a处局部放大的示意图。
21.附图标记列表1、储存箱体;101、上导向折板;2、侧箱板;201、侧板导杆;202、侧板支杆;3、密封前板;301、前板推进齿条;4、平移支座;401、导向上筒;402、滑动台座;4021、支承混子;4022、链体夹块;5、升降支座;501、升降导孔;502、抬升楔脚;6、电动螺旋推缸;7、链条推进机构;701、主动链轮;702、从动链轮;7021、闭锁从动齿轮;8、推进驱动件;9、紫外线消毒灯;10、臭氧发生器;11、充电接座;12、控制面板。
具体实施方式
22.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
23.实施例:请参考图1至图10:本发明提出了用于人工智能机器人的智能储存结构,包括:储存箱体1;储存箱体1的两侧分别设有一处侧箱板2;密封前板3,密封前板3设有两处,两处密封前板3分别滑动连接在储存箱体1的前方两侧,密封前板3的后表面下侧固定连接有一处前板推进齿条301;平移支座4,平移支座4设有两处,两处平移支座4分别活动连接在两处侧箱板2内侧;升降支座5,升降支座5设有两组,两组升降支座5分别滑动连接在两组平移支座4上;电动螺旋推缸6,
电动螺旋推缸6设有两处,两处电动螺旋推缸6的主体分别通过螺钉固定连接在平移支座4上,且两处电动螺旋推缸6的输出推杆分别固定连接在两处升降支座5上表面;链条推进机构7,链条推进机构7设有两组,两组链条推进机构7的链条分别固定连接两组平移支座4;推进驱动件8,推进驱动件8设有两处,两处推进驱动件8分别固定连接在两处侧箱板2的内表面上,且推进驱动件8连接并驱动链条推进机构7;储存箱体1的内部后壁下端固定连接有两处紫外线消毒灯9;臭氧发生器10,臭氧发生器10固定连接在侧箱板2的内表面上;充电接座11,充电接座11固定连接在储存箱体1的内部上方;控制面板12,控制面板12通过螺钉固定连接在左侧的侧箱板2的外表面上,且控制面板12电性连接两处推进驱动件8、两处电动螺旋推缸6、紫外线消毒灯9和臭氧发生器10。
24.此外,根据本发明的实施例,如图1所示,储存箱体1的上板前方通过折弯加工有上导向折板101,上导向折板101后方滑动连接有密封前板3;密封前板3的内表面下方还通过导轨滑动连接在侧箱板2的前边缘上,起到导向和稳定的效果,通过上导向折板101辅助对箱体的前上方进行密封。
25.此外,根据本发明的实施例,如图5所示,侧箱板2的内表面上固定连接有一处侧板导杆201,侧板导杆201朝向前后方向设置,侧板导杆201的截面为双圆头矩形结构,侧箱板2的底部向内加工有折板结构,且侧箱板2的底板上表面固定连接有侧板支杆202,侧箱板2上固定连接有两处紫外线消毒灯9,两处紫外线消毒灯9分别设置在臭氧发生器10的上方和下方,通过两处紫外线消毒灯9对机器人的侧面进行紫外线照射消毒,并通过臭氧发生器10生成臭氧,对储存箱体1内部进行臭氧消毒。
26.此外,根据本发明的实施例,如图7所示,平移支座4的上方固定连接有一处导向上筒401,导向上筒401的内筒体截面为双圆头矩形结构,且导向上筒401滑动连接在侧板导杆201上,平移支座4的下端固定连接有一处矩形的滑动台座402,滑动台座402的下表面上固定连接有五处支承混子4021,且滑动台座402的上表面外边缘位置固定连接有一处链体夹块4022,链体夹块4022通过螺栓顶紧连接链条推进机构7的链条;通过导向上筒401与侧板导杆201的滑动连接,起到导向的作用,实现平移支座4平稳前后移动,并通过支承混子4021与侧板支杆202上表面滚动连接,起到辅助支撑的作用。
27.此外,根据本发明的实施例,如图6所示,升降支座5上开设有两处矩形通孔结构的升降导孔501,升降支座5的下方向内设置有两处抬升楔脚502;升降导孔501滑动连接平移支座4的垂直方向的两处方杆,起到辅助导向的作用,抬升楔脚502的内上方开设有楔形面,楔形结构的抬升楔脚502可以更平稳准确的插入机器人的底座下方,并通过升降支座5和电动螺旋推缸6的配合,拉动使升降支座5平稳且垂直上移,通过抬升楔脚502将智能机器人底部从两侧进行抬升,抬升后的智能机器人底部脱离地面,通过设置在储存箱体1内部底部的紫外线消毒灯9的作用,对机器人底部以及轮体进行照射消杀,还可以避免地面不良因素如地面积水、地面有杂物对机器人的底部轮体造成干扰或污染的情况,机器人通过自身移动进入储存装置,全程平稳,并且抬升组件通过对机器人的底座平稳垂直抬升,使机器人抬升全程保持平稳、直立状态,降低颠簸,可以避免传统的机器人进入充电座或储存装置的过程不稳定造成的机器人颠簸或倾斜的情况。
28.此外,根据本发明的实施例,如图7所示,链条推进机构7包括有主动链轮701、从动链轮702和连接链条,主动链轮701和从动链轮702的轴体分别转动连接在侧箱板2底板上表
面的后侧和前侧,且主动链轮701和从动链轮702通过连接链条形成链传动,主动链轮701的轴体上端连接推进驱动件8的转轴;通过推进驱动件8对链条推进机构7进行驱动,带动主动链轮701转动,而后通过链条连接从动链轮702,形成链传动机构,链条推进机构7的链条内侧通过链体夹块4022固定连接平移支座4,从而带动平移支座4实现前后平移,并实现机器人充电口与充电接座11的连接。
29.此外,根据本发明的实施例,如图7所示,链条推进机构7前方的从动链轮702的轴体上固定连接有一处闭锁从动齿轮7021,闭锁从动齿轮7021位于从动链轮702的下方,闭锁从动齿轮7021啮合连接前板推进齿条301;当平移支座4带动抬升后的机器人向储存装置内部进行移动时,闭锁从动齿轮7021在从动链轮702轴体带动下进行旋转,通过两侧的闭锁从动齿轮7021与两组前板推进齿条301之间的齿轮齿条传动效果,带动两侧的密封前板3向中间移动,实现对储存装置闭锁的效果,在机器人向储存装置内部推进的过程中,与闭锁结构联动,实现了储存装置自动闭锁的功能。
30.本实施例的具体使用方式与作用:本发明中,常态下升降支座5底部与地面贴合,并位于储存箱体1内部的前方,密封前板3呈展开状态,当送餐用机器人停止工作时,控制机器人行驶至储存箱体1前方,而后向里行驶,使机器人底座位于两侧的抬升楔脚502上方,通过控制面板12控制电动螺旋推缸6收缩,使升降支座5平稳提高,抬升后的智能机器人底部脱离地面,而后通过控制面板12控制储存箱体1内部底部的紫外线消毒灯9,对机器人底部以及轮体进行照射消,机器人抬高可以避免地面不良因素如地面积水、地面有杂物对机器人的底部轮体造成干扰或污染,机器人通过自身移动进入储存装置,全程平稳,并且抬升组件通过对机器人的底座平稳垂直抬升,使机器人抬升全程保持平稳、直立状态,降低颠簸,通过控制面板12控制两处推进驱动件8动作,对链条推进机构7进行驱动,链条推进机构7的链条内侧通过链体夹块4022固定连接平移支座4,从而带动平移支座4实现前后平移,实现机器人充电口与充电接座11的连接,当平移支座4带动抬升后的机器人向储存装置内部进行移动时,闭锁从动齿轮7021在从动链轮702轴体带动下进行旋转,通过两侧的闭锁从动齿轮7021与两组前板推进齿条301之间的齿轮齿条传动效果,带动两侧的密封前板3向中间移动,实现对储存装置闭锁的效果,可以避免消毒过程中臭氧和紫外线泄露至外界对周围环境造成影响的情况,同时对内部机器人起到保护的作用。
31.最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
32.以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1