一种双电机轮毂驱动系统的制作方法
1.本发明涉及轮毂驱动技术领域,特别涉及一种双电机轮毂驱动系统。
背景技术:
2.公开号为cn109532462a的专利公开了一种双电机耦合行星牵引传动轴承型减速电动轮毂,如图5所示,包括轮毂、设置于轮毂腔体内的行星牵引传动轴承型减速器,以及一、二号电机;所述行星牵引传动轴承型减速器中的太阳轮、行星架、外圈三者的任意顺序组合分别对应于行星牵引传动轴承型减速器中的动力输入端、动力输出端和中间传动部件,所述一号电机驱动动力输入端用于提供动力并通过动力输出端驱动轮毂转动,二号电机驱动中间传动部件用于速度耦合,该电动轮毂能够实现单电机工作模式、双电机转速耦合工作模式。
3.但是,当单电机工作模式时,一号电机输出动力,必须控制制动器接合固定件使齿圈固定,从而实现减速驱动;当双电机转速耦合工作模式时,需要释放制动器以使齿圈可以转动,因此,该电动轮毂必须设置单独的控制系统来实现制动器的接合或分离,系统复杂,制作成本较高。
技术实现要素:
4.本发明的目的是针对现有技术的不足,提供一种双电机轮毂驱动系统,其能够结构简单、制作成本较低,两个电机均可实现减速增扭,不需要单独设置执行元件控制系统,易于实现电机的小型化设计。
5.本发明的技术方案是:一种双电机轮毂驱动系统,包括第一电机、第二电机、第一行星排、第二行星排、轮毂、壳体,所述第一行星排的第一行星轮分别与第一太阳轮、第一齿圈啮合,所述第一行星轮周向固定在第一行星架上,所述第二行星排的第二行星轮分别与第二太阳轮、第二齿圈啮合,所述第二行星轮周向固定在第二行星架上,所述第一太阳轮周向固定在第二电机的电机轴上,所述第二太阳轮周向固定在第一电机的电机轴上,所述第一行星架与第二齿圈固定连接,所述第二行星架与第一齿圈固定连接,一单向离合器设置在第二齿圈与壳体之间,所述第二行星架经一输出轴与轮毂连接。
6.进一步的,所述单向离合器的内圈与第二齿圈固定连接,单向离合器的外圈与壳体连接固定。
7.进一步的,所述单向离合器采用楔块式,或滚珠式,或滚珠式。
8.进一步的,所述第二电机的电机轴为空心轴,所述第一电机的电机轴穿过空心轴与第二行星排的第二太阳轮周向固定。
9.进一步的,所述第二行星架的输出端与轮毂之间设置变速装置。
10.采用上述技术方案的有益效果:本系统采用单向离合器,能够自动实现结合或分离,在车辆动力需求小时,使用单电机驱动模式,单向离合器能够对第二齿圈制动,防止第二齿圈反转,在车辆动力需求大时,可采用双电机驱动模式,通过动力耦合实现无极调速,
使电机能够工作高效区间。本系统的单向离合器可自动接合或分离,不需要离合器或制动器等执行元件,因此不需要设置单独的执行元件控制系统,结构简单、制作成本较低,而且本系统的两个电机均可实现减速增扭,能够降低对电机的扭矩需求,易于实现电机的小型化设计。
11.下面结合说明书附图和具体实施例对本发明作进一步说明。
附图说明
12.图1为本发明的结构示意图;图2为本发明的单电机驱动模式示意图;图3为本发明的双电机驱动模式示意图;图4为本发明的倒车工作模式示意图;图5为现有技术的结构示意图。
具体实施方式
13.参见图1至图5,一种双电机轮毂驱动系统,包括第一电机1、第二电机2、第一行星排3、第二行星排6、轮毂4、壳体7,所述第一行星排3的第一行星轮3d分别与第一太阳轮3a、第一齿圈3c啮合,所述第一行星轮3d周向固定在第一行星架3b上,所述第二行星排6的第二行星轮6d分别与第二太阳轮6a、第二齿圈6c啮合,所述第二行星轮6d周向固定在第二行星架6b上。所述第一太阳轮3a周向固定在第二电机2的电机轴上,所述第二太阳轮6a周向固定在第一电机1的电机轴上,本实施例中所述第二电机2的电机轴为空心轴,所述第一电机1的电机轴穿过空心轴与第二行星排6的第二太阳轮6a周向固定,让第一电机1与第二电机2设置在同一侧,使轮毂4内的结构步骤更加紧凑。所述第一行星架3b与第二齿圈6c固定连接,所述第二行星架6b与第一齿圈3c固定连接,使第一行星排3的动力可分别通过第一行星架3b、第一齿圈3c传递给第二行星排6进行动力耦合。一单向离合器5设置在第二齿圈6c与壳体7之间,所述单向离合器5的内圈与第二齿圈6c,单向离合器5的外圈与壳体连接固定,该单向离合器5用于限制第二齿圈6c反转,本实施例的单向离合器5可采用楔块式,或滚珠式,或滚珠式等。所述第二行星架6b经一输出轴8与轮毂4连接,通过第二行星架6b向轮毂4输出动力,此外,还可以在第二行星架6b的输出端与轮毂4之间设置行星轮等变速装置,以达到提高系统动力性的目的。
14.为便于分析行星轮机构的太阳轮、行星架、齿圈三个构件的运动关系,引入行星轮杠杆分析方法,本驱动系统在实际应用中,具有的工作模式如下,1.单电机驱动工作模式如图2所示,第二电机2不工作,处于空转状态,第一电机1处于电驱动状态,正向旋转并输出动力给第二行星排6的第二太阳轮6a,此时第二齿圈6c受单向离合器5的约束处于静止状态,从而使第一电机1的动力经第二行星架6b进行减速增扭后输出至轮毂4,该模式由第一电机1单独为轮毂4提供动力,通过第二行星排6进行减速增扭后将动力输出用于驱动车辆运行。这种模式适用于动力需求较小或车速较低的工况,可提高单个电机的负荷率,使电机在高效区间工作,降低能量消耗。
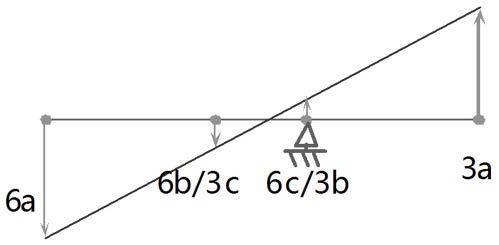
15.2.双电机驱动工作模式
第一电机1、第二电机2均处于电驱动状态,如图3所示,实线和虚线分别表示同一车速下(对应于第二行星架6b的转速)的不同电机转速组合,第一电机1通过第二行星排6将动力传递至轮毂4,此时单向离合器5解除对第二齿圈6c的制约,第二太阳轮6a、第二行星架6b、第二齿圈6c均为正转,当第一行星排3的第一太阳轮3a、第一行星架3b、第一齿圈3c也处于正转时,第二电机2通过第一行星排3将动力从第一行星架3b传递至第二齿圈6c,并通过第一齿圈3c将动力传递至第二行星架6b,由此将第二电机2的动力从第一行星排3传递给第二行星排6进行动力耦合,且根据行星轮机构具有两个自由度的运动学特性,可实现第一电机1和第二电机2转速的自由调节,从而达到无极调速的目的。该模式适用于大动力需求或较高车速的工况,利用行星轮机构的无极调速,使电机工作在高效区间,提供较大动力的同时降低能量消耗。
16.3.倒车工作模式如图4所示,第一电机1反转驱动,第二电机2正转驱动,此时第二太阳轮6a、第二行星架6b和第一齿圈3c反转,通过第一齿圈3c将第二电机2的动力传递至第二行星架6b,第一太阳轮3a、第一行星架3b和第二齿圈6c正转,通过第一行星架3b将第二电机2的动力传递至第二齿圈6c,使第二电机2的动力通过第一行星排3与第二行星排6进行耦合,最终由第二行星架6b将耦合后的动力输出至轮毂4,在该模式下,同样可实现第一电机1和第二电机2转速的自由调节,达到无极调速的目的。
17.4.能量回收模式当车辆制动或减速时,轮毂4在惯性的作用下继续转动,并通过第二行星架6b将动力从第二行星排6传递给第一电机1,以及通过第一行星排3将动力传递给第二电机2,使第一电机1和第二电机2由驱动状态切换至发电状态,从而将车辆制动时的动能损耗转换为电能为电池充电,达到减少能量消耗的目的。
18.本驱动系统的两个电机可进行速度耦合实现无极调速,当在车辆动力需求小时,使用单电机驱动模式,当车辆动力需求大时,可采用双电机驱动模式,通过动力耦合实现无极调速,使电机能够工作高效区间,且两个电机均可实现减速增扭,能够降低对电机的扭矩需求,易于实现电机的小型化设计,而且本驱动系统采用的单向离合器5能够自动实现结合或分离,在单电机驱动模式下,防止第二齿圈6c反转,在双电机驱动模式下,允许第二齿圈6c正转,并且不需要离合器或制动器等执行元件,因此不需要设置单独的执行元件控制系统,结构简单、制作成本较低。
19.以上是对本技术方案的详细说明,应当理解的是,由于文字的局限性,及技术方案的多样性,本领域的技术人员通过对本技术方案的文字、语法或其它的等同替换,同样能够实现本技术方案,因此,这样的替换均应当视为在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1