车辆及非接触供电系统的制作方法
1.本公开涉及车辆及非接触供电系统。
背景技术:
2.以往,已知有使用磁场共振方式这样的传输方式而在设置于地面的地上供电装置与车辆之间以非接触的方式传输电力的技术(专利文献1~3)。
3.在专利文献1所记载的非接触供电系统中,当通过短程通信进行了地上供电装置与车辆的配对后,进行从地上供电装置向车辆的供电,对车辆的蓄电池进行充电。
4.另外,在专利文献2、3所记载的非接触供电系统中,在地上供电装置的送电装置与车辆的受电装置之间存在异物的情况下,从地上供电装置向车辆的供电停止。
5.现有技术文献
6.专利文献1:日本特开2013-240132号公报
7.专利文献2:日本特开2015-25742号公报
8.专利文献3:日本特开2012-257404号公报
技术实现要素:
9.发明所要解决的课题
10.在车辆中检测到在设置有送电装置的道路上存在异物或在地上供电装置的送电装置与车辆的受电装置指尖的相对位置产生了偏移的情况下,需要将该检测结果发送给地上供电装置。尤其是,在车辆的行驶中进行从地上供电装置向车辆的供电的情况下,需要将检测结果从车辆迅速地传递至地上供电装置。然而,在专利文献2、3中,以在停车中进行从车辆向地上供电装置的供电为前提,在专利文献2、3所记载的手法中,未必能够迅速地传递检测结果。
11.鉴于上述课题,本公开的目的在于使得能够将由车辆得到的偏移或异物的检测结果迅速地传递至地上供电装置。
12.用于解决课题的手段
13.本公开的主旨如下。
14.(1)一种车辆,从地上供电装置的设置于道路的送电装置以非接触的方式接受电力,
15.上述车辆具有:
16.受电装置,从上述送电装置接受电力;
17.车辆侧通信装置,通过通信距离小于10米的短程无线通信向上述地上供电装置发送包含车辆的识别信息的信号;
18.横向偏移检测装置,检测在与上述车辆的行进方向垂直的方向上有无上述受电装置相对于上述送电装置的相对位置偏移;及
19.车辆侧控制装置,控制上述车辆侧通信装置,
20.在检测到存在上述受电装置相对于上述送电装置的相对位置偏移时,上述车辆侧控制装置控制上述车辆侧通信装置以不从上述地上供电装置进行送电。
21.(2)一种车辆,从地上供电装置的设置于道路的送电装置以非接触的方式接受电力,
22.上述车辆具有:
23.受电装置,从上述送电装置接受电力;
24.车辆侧通信装置,通过通信距离小于10米的短程无线通信向上述地上供电装置发送包含车辆的识别信息的信号;
25.异物检测装置,检测上述道路上的异物;及
26.车辆侧控制装置,控制上述车辆侧通信装置,
27.在检测到上述道路上的异物时,上述车辆侧控制装置控制上述车辆侧通信装置以不从上述地上供电装置进行送电。
28.(3)根据上述(2)所述的车辆,上述异物检测装置在该车辆的前后方向上配置于比上述受电装置靠前方处,以使得能够在该车辆的行驶期间在上述受电装置到达上述送电装置上之前检测有无上述异物。
29.(4)根据上述(2)或(3)所述的车辆,上述车辆还具有检测在与上述车辆的行进方向垂直的方向上有无上述受电装置相对于上述送电装置的相对位置偏移的横向偏移检测装置,
30.在检测到存在上述受电装置相对于上述送电装置的相对位置偏移时,上述车辆侧控制装置控制上述车辆侧通信装置以不从上述地上供电装置进行送电。
31.(5)根据上述(1)或(4)所述的车辆,上述横向偏移检测装置在该车辆的前后方向上配置于比上述受电装置靠前方处,以使得能够在该车辆的行驶期间在上述受电装置到达上述送电装置上之前检测有无上述相对位置偏移。
32.(6)根据上述(1)~(5)中任一项所述的车辆,控制上述车辆侧通信装置以不从上述地上供电装置进行送电是指:停止从上述车辆侧通信装置向上述地上供电装置发送信号。
33.(7)根据上述(1)~(5)中任一项所述的车辆,控制上述车辆侧通信装置以不从上述地上供电装置进行送电是指:从上述车辆侧通信装置向上述地上供电装置发送除了上述车辆的识别信息以外还包含从上述地上供电装置的送电的停止请求的信号。
34.(8)一种非接触供电系统,具有上述(1)~(7)中任一项所述的车辆及向该车辆以非接触的方式传输电力的地上供电装置,
35.上述地上供电装置具有:上述送电装置、从上述车辆侧通信装置接收上述信号的地上侧通信装置及控制上述送电装置的地上侧控制装置,
36.上述地上侧控制装置在上述地上侧通信装置从上述车辆接收到上述信号时允许为了向上述受电装置的供电而向上述送电装置供给电力。
37.(9)根据上述(8)所述的非接触供电系统,当允许向上述送电装置供给电力时,上述地上侧控制装置持续进行电力的供给直至用于结束或中断该电力的供给的条件成立为止。
38.(10)根据上述(8)所述的非接触供电系统,当上述地上侧通信装置不再从上述车
辆接收到上述信号时,上述地上侧控制装置禁止为了向上述受电装置的供电而向上述送电装置供给电力。
39.发明效果
40.根据本公开,能够将由车辆得到的偏移或异物的检测结果迅速地传递至地上供电装置。
附图说明
41.图1是概略性地示出非接触供电系统的结构的图。
42.图2是控制器及连接于控制器的设备的概略性的结构图。
43.图3是ecu及连接于ecu的设备的概略性的结构图。
44.图4是对车辆的底面从下方进行观察时的图。
45.图5是在非接触供电系统中使用的通信系统的概略性的结构图。
46.图6是概略性地示出服务器的硬件结构的图。
47.图7是与利用了广域无线通信的车辆、服务器及地上供电装置之间的通信相关的动作序列图。
48.图8是与利用了广域无线通信的车辆、服务器及地上供电装置之间的通信相关的与图7相同的动作序列图。
49.图9是示出服务器中的与利用了广域无线通信的通信相关的处理的流程的流程图。
50.图10是示出地上供电装置中的与利用了广域无线通信的通信相关的处理的流程的流程图。
51.图11是概略性地示出车辆接近地上供电装置而进行供电时的车辆及地上供电装置的动作及状态的推移的图。
52.图12是概略性地示出地上供电装置2的状态及动作的转变的图。
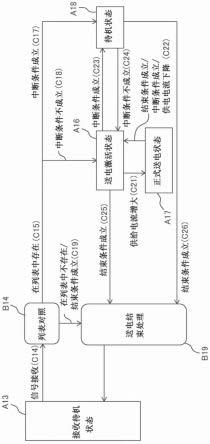
53.图13是概略性地示出地上供电装置2的状态及动作的转变的图。
54.图14是概略性地示出车辆的状态及动作的转变的图。
55.图15是示出与受电结束处理的执行相关的作业的流程的流程图。
56.图16是概略性地示出车辆的状态处于图14的受电激活、信号发送状态时的车辆的状态的转变的图。
具体实施方式
57.以下,参照附图来对实施方式进行详细说明。另外,在以下的说明中,对相同的构成要素标注同一附图标记。
58.第一实施方式
59.首先,参照图1~图15来对第一实施方式的非接触供电系统1进行说明。
60.《非接触供电系统1的整体结构》
61.图1是概略性地示出非接触供电系统1的结构的图。非接触供电系统1具有地上供电装置2和在道路100上行驶的车辆3,从地上供电装置2向车辆3进行基于磁场谐振耦合(磁场共振)的非接触电力传输。尤其是,在本实施方式中,非接触供电系统1在车辆3正在行驶
时,进行从地上供电装置2向车辆3的非接触电力传输。因此,地上供电装置2在车辆3正在行驶时,向车辆3以非接触的方式传输电力,车辆3在车辆3正在行驶时,从地上供电装置2以非接触的方式接受电力。地上供电装置2具有构成为以非接触的方式向车辆3送电的送电装置4,车辆3具有构成为以非接触的方式从送电装置4受电的受电装置5。如图1所示,送电装置4埋入于车辆3行驶的道路100内(地中),例如车辆3行驶的车道的中央。
62.另外,行驶中这一用语意味着车辆3为了行驶而位于道路上的状态。因此,行驶中这一用语不仅包含车辆3正在实际以比零大的任意的速度行驶的状态,也包含例如因等红绿灯等而在道路上停止的状态。另一方面,即使车辆3位于道路上,例如在驻车的情况下,也不包含于行驶中。
63.《地上供电装置的结构》
64.如图1所示,地上供电装置2除了送电装置4以外还具备电源21及控制器22。电源21及控制器22可以埋入于道路100内,也可以配置于与道路100内不同的场所(包括地上)。
65.电源21向送电装置4供给电力。电源21例如是供给单相交流电力的商用交流电源。另外,电源21可以是供给三相交流电力的其他的交流电源,也可以是燃料电池这样的直流电源。
66.送电装置4将从电源21供给的电力向车辆3传输。送电装置4具有送电侧整流电路41、变换器42及送电侧谐振电路43。在送电装置4中,从电源21供给的交流电力在送电侧整流电路41中被整流而被变换为直流电流,该直流电流在变换器42中被变换为交流电力,该交流电力向送电侧谐振电路43供给。
67.送电侧整流电路41与电源21及变换器42电连接。送电侧整流电路41对从电源21供给的交流电力进行整流而变换为直流电力,并将直流电力向变换器42供给。送电侧整流电路41是例如ac/dc转换器。
68.变换器42与送电侧整流电路41及送电侧谐振电路43电连接。变换器42将从送电侧整流电路41供给的直流电力变换为比电源21的交流电力高的频率的交流电力(高频电力),并将高频电力向送电侧谐振电路43供给。
69.送电侧谐振电路43具有由线圈44及电容器45构成的谐振器。线圈44及电容器45的各种参数(线圈44的外径及内径、线圈44的匝数、电容器45的静电容等)以使送电侧谐振电路43的谐振频率成为预定的设定值的方式确定。预定的设定值例如是10khz~100ghz,优选是作为非接触电力传输用的频带而由sae tir j2954标准确定的85khz。
70.送电侧谐振电路43以使线圈44的中心位于车道的中央的方式配置于车辆3通过的车道的中央。当从变换器42供给的高频电力施加于送电侧谐振电路43时,送电侧谐振电路43产生用于送电的交流磁场。另外,在电源21是直流电源的情况下,也可以省略送电侧整流电路41。
71.控制器22是地上侧控制装置的一例。控制器22例如是通用计算机,进行地上供电装置2的各种控制。例如,控制器22与送电装置4的变换器42电连接,为了控制送电装置4的电力发送而控制变换器42。此外,控制器22控制后述的地上侧第一通信装置81及地上侧第二通信装置82。
72.图2是控制器22及连接于控制器22的设备的概略性的结构图。控制器22具备:通信接口221、存储器222及处理器223。通信接口221、存储器222及处理器223经由信号线而相互
连接。
73.通信接口221具有用于将控制器22与构成地上供电装置2的各种设备(例如,变换器42、后述的地上侧传感器23、地上侧第一通信装置81及地上侧第二通信装置82等)连接的接口电路。控制器22经由通信接口221而与其他设备通信。
74.存储器222例如具有易失性的半导体存储器(例如,ram)、非易失性的半导体存储器(例如,rom)等。存储器222存储用于在处理器223中执行各种处理的计算机程序和在由处理器223执行各种处理时使用的各种数据等。存储器222例如存储有可能利用地上供电装置2进行供电的车辆的车辆识别信息的列表(以下,称作“识别信息列表”)及供电中的车辆3的车辆识别信息。
75.处理器223具有一个或多个cpu(central processing unit:中央处理单元)及其周边电路。处理器223也可以还具有逻辑运算单元或数值运算单元这样的运算电路。处理器223基于存储于存储器222的计算机程序来执行各种处理。
76.另外,如图2所示,地上供电装置2还具备地上侧传感器23。地上侧传感器23检测地上供电装置2的状态。在本实施方式中,地上侧传感器23例如包括:检测向送电装置4的各种设备(尤其是,送电侧谐振电路43、变换器42及送电侧整流电路41)流动的电流的送电装置电流传感器、检测向送电装置4的各种设备施加的电压的送电装置电压传感器、检测送电装置4的各种设备的温度的送电装置温度传感器、检测埋入有送电装置4的道路上的异物的异物传感器及检测埋入有送电装置4的道路上的生物的生物传感器。地上侧传感器23的输出向控制器22输入。
77.另外,送电装置4也可以构成为能够从车辆3接受电力。在该情况下,送电装置4与后述的车辆3的受电装置5相同地,具有用于将接受到的电力向电源21供给的装置或电路。另外,在该情况下,送电装置4也可以将由上述的线圈44及电容器45构成的谐振器利用于从车辆3接受电力。
78.《车辆的结构》
79.另一方面,如图1所示,车辆3除了受电装置5以外,还具有电动机31、蓄电池32、功率控制单元(pcu)33及电子控制单元(ecu)34。在本实施方式中,车辆3是电动机31驱动车辆3的电动车辆(ev)。然而,车辆3也可以是除了电动机31以外内燃机也驱动车辆3的混合动力车辆(hv)。
80.电动机31例如是交流同步电动机,作为电动机及发电机发挥功能。电动机31在作为电动机发挥功能时,以蓄积于蓄电池32的电力为动力源而被驱动。电动机31的输出经由减速器及车轴而向车轮30传递。另一方面,在车辆3减速时,通过车轮30的旋转而驱动电动机31,电动机31作为发电机发挥功能而发电产生再生电力。
81.蓄电池32是能够充电的二次电池,例如由锂离子电池、镍氢电池等构成。蓄电池32蓄积车辆3的行驶所需的电力(例如电动机31的驱动电力)。当被供给受电装置5从送电装置4接受到的电力时,蓄电池32被充电。另外,当由电动机31发电产生的再生电力向蓄电池32供给时,蓄电池32被充电。当蓄电池32被充电时,蓄电池32的充电率(soc:state of charge(电量状态))恢复。另外,蓄电池32也可以能够经由设置于车辆3的充电口而通过除了地上供电装置2以外的外部电源进行充电。
82.pcu33与蓄电池32及电动机31电连接。pcu33具有变换器、升压转换器及dc/dc转换
器。变换器将从蓄电池32供给的直流电力变换为交流电力,并将交流电力向电动机31供给。另一方面,变换器将通过电动机31发电而产生的交流电力(再生电力)变换为直流电力,并将直流电力向蓄电池32供给。在蓄积于蓄电池32的电力向电动机31供给时,升压转换器根据需要而对蓄电池32的电压进行升压。在蓄积于蓄电池32的电力向前照灯等电子设备供给时,dc/dc转换器对蓄电池32的电压进行降压。
83.受电装置5从送电装置4受电,并将接受到的电力向蓄电池32供给。受电装置5具有:受电侧谐振电路51、受电侧整流电路54及充电电路55。
84.受电侧谐振电路51以使与路面之间的距离变小的方式配置于车辆3的底部。在本实施方式中,受电侧谐振电路51在车宽方向上配置于车辆3的中央。受电侧谐振电路51具有与送电侧谐振电路43相同的结构,具有由线圈52及电容器53构成的谐振器。线圈52及电容器53的各种参数(线圈52的外径及内径、线圈52的匝数、电容器53的静电容等)以使受电侧谐振电路51的谐振频率与送电侧谐振电路43的谐振频率一致的方式确定。另外,若受电侧谐振电路51的谐振频率与送电侧谐振电路43的谐振频率的偏离量较小,例如若受电侧谐振电路51的谐振频率为送电侧谐振电路43的谐振频率的
±
20%的范围内,则受电侧谐振电路51的谐振频率未必需要与送电侧谐振电路43的谐振频率一致。
85.在如图1所示那样受电侧谐振电路51与送电侧谐振电路43相向时,当通过送电侧谐振电路43生成了交流磁场时,交流磁场的振动向以与送电侧谐振电路43相同的谐振频率共振的受电侧谐振电路51传递。其结果是,通过电磁感应而在受电侧谐振电路51流动感应电流,通过感应电流而在受电侧谐振电路51中产生感应电动势。即,送电侧谐振电路43向受电侧谐振电路51送电,受电侧谐振电路51从送电侧谐振电路43受电。
86.受电侧整流电路54与受电侧谐振电路51及充电电路55电连接。受电侧整流电路54对从受电侧谐振电路51供给的交流电力进行整流而变换为直流电力,并将直流电力向充电电路55供给。受电侧整流电路54例如是ac/dc转换器。
87.充电电路55与受电侧整流电路54及蓄电池32电连接。尤其是,与蓄电池32经由继电器38而连接。充电电路55将从受电侧整流电路54供给的直流电力变换为蓄电池32的电压电平并向蓄电池32供给。当从送电装置4传输的电力由受电装置5向蓄电池32供给时,蓄电池32被充电。充电电路55例如是dc/dc转换器。
88.ecu34是车辆侧控制装置的一例,进行车辆3的各种控制。例如,ecu34与受电装置5的充电电路55电连接,为了控制从送电装置4发送的电力对蓄电池32的充电而控制充电电路55。另外,ecu34与pcu33电连接,为了控制蓄电池32与电动机31之间的电力的授受而控制pcu33。此外,ecu34控制后述的车辆侧第一通信装置71及车辆侧第二通信装置72。
89.图3是ecu34及连接于ecu34的设备的概略性的结构图。ecu34具有:通信接口341、存储器342及处理器343。通信接口341、存储器342及处理器343经由信号线而相互连接。
90.通信接口341具有用于将ecu34与遵循了can(controller area network:控制器局域网)等标准的车内网络连接的接口电路。ecu34经由通信接口341而与其他设备进行通信。
91.存储器342例如具有易失性的半导体存储器(例如,ram)及非易失性的半导体存储器(例如rom)。存储器342存储用于在处理器343中执行各种处理的计算机程序和在由处理器343执行各种处理时使用的各种数据等。
92.处理器343具有一个或多个cpu(central processing unit:中央处理单元)及其周边电路。处理器343也可以还具有逻辑运算单元或数值运算单元这样的运算电路。处理器343基于存储于存储器342的计算机程序来执行各种处理。
93.另外,如图3所示,车辆3还具备:gnss接收机35、存储装置36、多个车辆侧传感器37及继电器38。gnss接收机35、存储装置36、车辆侧传感器37及继电器38经由车内网络而与ecu34电连接。
94.gnss接收机35基于从多个(例如三个以上)测位卫星得到的测位信息而检测车辆3的当前位置(例如车辆3的纬度及经度)。具体而言,gnss接收机35捕捉多个测位卫星,接收从测位卫星发送出的电波。并且,gnss接收机35基于电波的发送时刻与接收时刻之差而算出距测位卫星的距离,基于距测位卫星的距离及测位卫星的位置(轨道信息)来检测车辆3的当前位置。gnss接收机35的输出即由gnss接收机35检测出的车辆3的当前位置向ecu34发送。作为该gnss接收机35,例如使用gps接收机。
95.存储装置36存储数据。存储装置36例如具备硬盘驱动器(hdd)、固态驱动器(ssd)或光记录介质。在本实施方式中,存储装置36存储地图信息。在地图信息中,除了与道路相关的信息以外,还包括地上供电装置2的设置位置信息等信息。ecu34从存储装置36取得地图信息。另外,在存储装置36中也可以不包含地图信息,在该情况下,ecu34也可以经由车辆侧第一通信装置71而从车辆3的外部(例如,后述的服务器91)取得地图信息。
96.车辆侧传感器37检测车辆3的状态。在本实施方式中,车辆侧传感器37作为检测车辆3的状态的传感器而包括:检测车辆3的速度的速度传感器、检测蓄电池32的温度的蓄电池温度传感器、检测受电装置5的各种设备(尤其是,受电侧谐振电路51及受电侧整流电路54)的温度的受电装置温度传感器、检测蓄电池32的充电电流值及放电电流值的蓄电池电流传感器、检测向受电装置5的各种设备流动的电流的受电装置电流传感器及检测向受电装置5的各种设备施加的电压的受电装置电压传感器。车辆侧传感器37的输出向ecu34输入。
97.继电器38配置于蓄电池32与受电装置5之间,而将蓄电池32与受电装置5连接、切断。在继电器38处于连接状态时,受电装置5接受到的电力向蓄电池32供给。然而,在继电器38处于切断状态时,电流不从受电装置5向蓄电池32流动,由此,受电装置5实质上无法受电。
98.另外,受电装置5也可以构成为能够向地上供电装置2传输电力。在该情况下,受电装置5与地上供电装置2的送电装置4相同地,具有用于将蓄电池32的电力向地上供电装置2传输的结构。另外,在该情况下,受电装置5也可以将由上述的线圈52及电容器53构成的谐振器利用于向地上供电装置2传输电力。
99.《横向偏移检测装置的结构》
100.为了高效地进行非接触电力传输,需要地上供电装置2的送电装置4与车辆3的受电装置5之间的位置偏移较小。因此,在本实施方式中,非接触供电系统1具有用于检测与车辆3的行进方向垂直的方向上的送电装置4与受电装置5之间的相对位置的偏移(以下,称作“横向偏移”)有无的横向偏移检测装置。尤其是,在本实施方式中,横向偏移检测装置具备设置于地上供电装置2的交流磁场产生电路61及交流电力产生电路64和设置于车辆3的磁场检测器66。
101.交流磁场产生电路61产生用于检测送电装置4(尤其是送电侧谐振电路43)与受电装置5(尤其是受电侧谐振电路51)之间的相对的位置关系的交流磁场(以下,称作“横向偏移检测用的交流磁场”)。在本实施方式中,交流磁场产生电路61在设置有送电装置4的道路中,在车辆3的行进方向上配置于比送电装置4的送电侧谐振电路43靠近前处。另外,交流磁场产生电路61配置于地中(路面之下)或路面之上。
102.交流磁场产生电路61具有与送电侧谐振电路43相同的结构,具有由线圈62及电容器63构成的谐振器。线圈62及电容器63的各种参数(线圈62的外径及内径、线圈62的匝数、电容器63的静电容等)以使交流磁场产生电路61的谐振频率成为预定的设定值的方式确定。预定的设定值被设定为与送电侧谐振电路43的谐振频率即磁场谐振耦合的谐振频率不同的值。另外,交流磁场产生电路61未必需要通过谐振来产生磁场,由此,也可以不具有电容器63。
103.交流电力产生电路64与电源21及交流磁场产生电路61电连接。交流电力产生电路64产生交流电力,并将交流电力向交流磁场产生电路61供给。例如,交流电力产生电路64具有振荡电路及放大器。振荡电路例如由整流电路及变换器构成,将从电源21供给的交流电力变换为预定频率的交流电力。放大器将振荡电路的输出电力(交流电力)放大。
104.如图1所示,交流电力产生电路64与控制器22电连接,控制器22控制交流电力产生电路64。交流电力产生电路64基于来自控制器22的指令而将交流电力向交流磁场产生电路61供给。
105.磁场检测器66检测周围的磁场。磁场检测器66例如是磁阻抗(mi:magneto-impedance(磁阻抗))传感器。磁场检测器66的驱动电力例如从蓄电池32经由驱动电路而向磁场检测器66供给。另外,磁场检测器66也可以是霍尔传感器、磁阻效应(mr:magneto resistive)传感器等。磁场检测器66以与路面之间的距离变小的方式配置于车辆3的底部。
106.图4是对车辆3的底面从下方进行观察时的图。如图4所示,磁场检测器66在车辆3的前后方向上配置于比受电侧谐振电路51靠前方处。另外,磁场检测器66也可以在车辆3的前后方向上配置于与受电侧谐振电路51相同的位置或比受电侧谐振电路51靠后方处。另外,磁场检测器66在相对于车辆3的行进方向垂直的方向(车宽方向)上排列配置多个。尤其是,在本实施方式中,多个磁场检测器66在车宽方向上相互分离,例如在该方向上等间隔地配置。当从磁场检测器66的周围的地上供电装置2发出了横向偏移检测用的交流磁场时,磁场检测器66检测位置偏移检测用的交流磁场。
107.磁场检测器66与ecu34电连接,磁场检测器66的输出向ecu34发送。因此,在本实施方式中,对ecu34输入来自磁场检测器66的输出,ecu34基于该输出来检测受电侧谐振电路51与送电侧谐振电路43之间有无横向偏移、即有无送电装置4与受电装置5的横向偏移。
108.在这样构成的横向偏移检测装置中,根据在车辆3通过地上供电装置2上时由多个排列的磁场检测器66检测到的磁场的强度来检测受电侧谐振电路51与送电侧谐振电路43之间的与车辆3的行进方向垂直的方向上的横向偏移。在受电侧谐振电路51与送电侧谐振电路43之间的横向偏移较小的情况、即车辆3正在车道的中央附近行驶的情况下,由配置于车宽方向上的中央的磁场检测器66检测到的磁场的强度最强。另一方面,在受电侧谐振电路51与送电侧谐振电路43之间的横向偏移较大的情况、即车辆3正在偏离车道的中央地行驶的情况下,由离开车宽方向的中央地配置的磁场检测器66检测到的磁场的强度最强。横
向偏移检测装置能够这样检测受电侧谐振电路51与送电侧谐振电路43之间有无横向偏移、即送电装置4与受电装置5之间有无横向偏移。尤其是,在本实施方式中,由于磁场检测器66配置于比受电装置5靠前方处、尤其是比受电侧谐振电路51靠前方处,所以能够在车辆3行驶中在受电装置5到达送电装置6(尤其是送电侧谐振电路43)上之前检测出有无横向偏移。
109.另外,在本实施方式中,在地上供电装置2设置交流磁场产生电路61,在车辆3设置磁场检测器66。然而,也可以在车辆3也设置交流磁场产生电路,在地上供电装置2也设置磁场检测器。在该情况下,基于设置于地上供电装置2的磁场检测器的输出,地上供电装置2的控制器22检测受电侧谐振电路51与送电侧谐振电路43之间有无横向偏移。
110.另外,在本实施方式中,横向偏移检测装置使用磁场来检测有无横向偏移。然而,横向偏移检测装置也可以使用磁场以外来检测有无横向偏移,例如,也可以是使用了超声波的声纳等。另外,横向偏移检测装置也可以基于由拍摄车辆的周围的车外相机拍摄到的图像或gnss接收机35的输出等来检测车道中的车辆的位置,基于检测到的车辆3的位置来检测有无横向偏移。另外,在本实施方式中,横向偏移检测装置检测有无横向偏移,但也可以检测车辆3距车道的中央的横向偏移量。在该情况下,在由横向偏移检测装置检测到的横向偏移量为预定的基准值以上的情况下,横向偏移检测装置判断为产生了横向偏移。
111.《异物检测装置的结构》
112.为了高效地进行非接触电力传输,需要在地上供电装置2的送电装置4与车辆3的受电装置5之间不存在异物。因此,在本实施方式中,车辆3具有检测车辆3的前方或下方的道路上的异物的异物检测装置。尤其是,在本实施方式中,异物检测装置具有检测道路上的物体的物体传感器39和检测道路上的生物的生物传感器40。
113.物体传感器39检测车辆3的前方或下方的道路上的物体。在本实施方式中,物体传感器39是雷达。雷达呈脉冲状地或者一边调制频率一边连续地放射电波,并且测定对于该电波的反射波,测定处于测定范围内的对象物的位置。雷达从发送天线发送电波,并且通过接收天线接收反射波。并且,雷达基于从自发送天线发送电波起到接收反射波为止的时间来测定距周围的物体的距离。除此以外,雷达基于排列配置的多个接收天线间的反射波的接收的偏差来测定物体相对于雷达所处的方向。雷达将从发送天线发送出的电波和通过接收天线接收到的反射波混合后进行信号处理,生成与物体的位置相关的数据(例如,点阵数据)。
114.物体传感器39配置于车辆3的底部。如图4所示,物体传感器39在车辆3的前后方向上配置于比受电侧谐振电路51靠前方处。尤其是,在本实施方式中,物体传感器39配置于车辆3的前端附近。通过物体传感器39这样配置于比受电装置5靠前方处、尤其是比受电侧谐振电路51靠前方处,能够在车辆3行驶中在受电装置5到达送电装置6(尤其是送电侧谐振电路43)上之前检测道路上有无物体。另外,物体传感器39也可以配置于车辆3的上部(车顶附近等),另外,也可以在车辆3的前后方向上配置于与受电侧谐振电路51相同的位置或比受电侧谐振电路51靠后方处。
115.物体传感器39与ecu34电连接,物体传感器39的输出向ecu34发送。因此,在本实施方式中,向ecu34输入来自物体传感器39的输出,尤其是,物体传感器39每当生成与物体的位置相关的数据时,将生成的数据经由车内网络而向ecu34输出。ecu34基于该输出来检测车辆3的下方的道路上的物体。
116.另外,在本实施方式中,作为检测车辆3的前方或下方的道路上的物体的物体传感器39而使用雷达。然而,只要能够检测车辆3的前方或下方的道路上的物体即可,例如,也可以使用lidar等其他物体传感器。
117.生物传感器40检测车辆3的前方或下方的道路上的生物。在本实施方式中,生物传感器40是对检测范围内的温度分布进行检测的热感相机。热感相机能够将检测到的温度分布作为图像而输出或将检测范围内的最高温度/最低温度及它们产生的位置作为数值而输出。通过使用热感相机,能够对检测范围内的发热物即生物进行检测。
118.或者,生物传感器40也可以是红外线传感器。红外线传感器使用红外线来检测在检测范围内具有热量的物体的动作。通过使用红外线传感器,能够检测检测范围内的发热物的动作、即生物的动作。
119.生物传感器40配置于车辆3的底部。如图4所示,生物传感器40在车辆3的前后方向上配置于比受电侧谐振电路51靠前方处。尤其是,在本实施方式中,生物传感器40配置于车辆3的前端附近。通过生物传感器40这样配置于比受电装置5靠前方处、尤其是比受电侧谐振电路51靠前方处,能够在车辆3行驶中在受电装置5到达送电装置6(尤其是送电侧谐振电路43)上之前检测道路上有无生物。另外,生物传感器40也可以配置于车辆3的上部(车顶附近等),另外,也可以在车辆3的前后方向上配置于与受电侧谐振电路51相同的位置或比受电侧谐振电路51靠后方处。
120.生物传感器40与ecu34电连接,生物传感器40的输出向ecu34发送。因此,在本实施方式中,向ecu34输入来自生物传感器40的输出,尤其是,生物传感器40每当生成与发热物相关的数据时,将生成的数据经由车内网络而向ecu34输出。ecu34基于该输出来检测车辆3的下方的道路上的生物。
121.另外,在本实施方式中,作为检测车辆3的前方或下方的道路上的生物的生物传感器40而使用热感相机或红外线传感器。然而,只要能够检测车辆3的前方或下方的道路上的生物即可,也可以使用其他生物传感器。
122.《通信系统的结构》
123.在如图1所示的非接触供电系统1中,为了从地上供电装置2向车辆3进行非接触电力传输,地上供电装置2需要确定在送电装置4上行驶的车辆3,另外,需要该车辆3的要求供电电力等信息。因此,为了进行该非接触电力传输,需要从车辆3向地上供电装置2发送包含车辆识别信息的各种车辆信息,另外,地上供电装置2需要接收从车辆3发送的车辆信息。
124.地上供电装置2为了确定在送电装置4上行驶的车辆3,需要仅从在地上供电装置2附近行驶的车辆3接收车辆识别信息。另一方面,当车辆3的速度较快时,在地上供电装置2附近行驶的期间可能会无法从车辆3接收包含要求供电电力等的全部车辆信息。
125.于是,在本实施方式中,车辆3在车辆3从地上供电装置2的设置位置离开某种程度时,将与车辆识别信息建立了关联的车辆信息通过广域无线通信而从车辆3向地上供电装置发送。并且,车辆3在车辆3接近了地上供电装置2的设置位置时或车辆3到达了地上供电装置2的送电装置4时,将车辆识别信息通过短程无线通信而从车辆3向地上供电装置2发送。即,在本实施方式中,在车辆信息预先通过广域无线通信而从车辆3向地上供电装置2发送后,车辆识别信息通过短程无线通信而从车辆3向地上供电装置2发送。
126.在此,车辆识别信息是用于识别车辆3的信息、例如车辆id。该车辆识别信息预先
存储于车辆3的ecu34的存储器342内。
127.另外,车辆信息是与电力传输相关的车辆3的信息,包含车辆识别信息。车辆信息例如包含要求从地上供电装置2受电的电力(或电力量)、即车辆要求电力(或车辆要求电力量)。车辆要求电力在车辆3的ecu34内算出。另外,车辆信息也可以包含:受电装置5的状态(蓄电池32与受电装置5的连接状态)、蓄电池32的充电率soc、蓄电池32的温度及容许充电电力win这样的与车辆的状态相关的信息。在该情况下,蓄电池32的充电率soc基于由车辆侧传感器37(蓄电池电流传感器)检测到的蓄电池32的充电电流值及放电电流值而在ecu34中算出。另外,蓄电池32的温度由车辆侧传感器37(蓄电池温度传感器)检测。另外,容许充电电力win表示用于避免金属锂向锂离子电池的负极表面析出的充电电力的最大值,该容许充电电力win基于蓄电池32的充电履历、蓄电池32的充电率soc及蓄电池32的温度而在ecu34中算出。
128.除此以外,车辆信息包含车辆3的当前位置信息。车辆3的当前位置信息基于gnss接收机35的输出而在ecu34中算出。此外,车辆信息也可以包含受电装置5的线圈44及电容器45的各种参数(线圈44的外径及内径、线圈44的匝数、电容器45的静电容等)、线圈44的从地面起的高度及受电侧谐振电路51的谐振频率这样的与受电装置5相关的信息。该车辆信息预先存储于车辆3的ecu34的存储器342内。此外,车辆信息也可以包含在收取利用费用时所需的使用者信息、例如用于确定使用者的支付账户的认证信息。该车辆信息例如通过车辆3的输入装置而由使用者事先登记,或者通过向设置于车辆3的读卡装置插入具有认证信息的卡而事先登记。
129.图5是在非接触供电系统1中使用的通信系统的概略性的结构图。如图3及图5所示,车辆3具有进行广域无线通信的车辆侧第一通信装置71和进行短程无线通信的车辆侧第二通信装置72。这些车辆侧第一通信装置71及车辆侧第二通信装置72经由车内网络而与ecu34连接。另一方面,如图2及图5所示,地上供电装置2具有进行广域无线通信的地上侧第一通信装置81和进行短程无线通信的地上侧第二通信装置82。这些地上侧第一通信装置81及地上侧第二通信装置82以有线的方式与控制器22电连接。尤其是,在本实施方式中,车辆侧第一通信装置71和地上侧第一通信装置81利用广域无线通信而直接地或间接地进行单向或双向的通信。另外,车辆侧第二通信装置72和地上侧第二通信装置82利用短程无线通信而直接地进行单向或双向的通信。
130.广域无线通信是通信距离比短程无线通信长的通信,具体而言,例如是通信距离为10米~10公里的通信。作为广域无线通信,能够使用通信距离较长的各种无线通信,例如,使用遵循了由3gpp(注册商标)、ieee制定的4g、lte、5g、wimax等任意的通信标准的通信。如上所述,在本实施方式中,利用广域无线通信,与车辆识别信息建立了关联的车辆信息从车辆3向地上供电装置2发送。
131.在本实施方式中,车辆3的车辆侧第一通信装置71和地上供电装置2的地上侧第一通信装置81经由服务器91而进行通信。具体而言,服务器91经由由光通信线路等构成的通信网络92而与多个无线基站93连接。车辆侧第一通信装置71及地上侧第一通信装置81使用广域无线通信而与无线基站93进行通信。因此,车辆3的车辆侧第一通信装置71与地上供电装置2的地上侧第一通信装置81使用广域无线通信来进行通信。
132.另外,地上侧第一通信装置81也可以以有线的方式与通信网络92连接。因此,地上
侧第一通信装置81也可以以有线而非无线的方式与服务器91连接。另外,车辆侧第一通信装置71也可以通过无线而直接地或经由通信网络而不经由服务器91地与地上侧第一通信装置81进行通信。因此,服务器91与车辆3通过广域无线通信而进行通信,并且与地上供电装置2以无线或有线的方式进行通信。
133.图6是概略性地示出服务器91的硬件结构的图。如图6所示,服务器91具备:外部通信模块911、存储装置912及处理器913。另外,服务器91也可以具有键盘及鼠标之类的输入装置及显示器之类的输出装置。
134.外部通信模块911与服务器91外的设备(地上供电装置2、车辆3等)进行通信。外部通信模块911具备用于将服务器91与通信网络92连接的接口电路。外部通信模块911构成为能够经由通信网络92及无线基站93而与多个车辆3及地上供电装置2分别进行通信。
135.存储装置912具有易失性的半导体存储器(例如,ram)、非易失性的半导体存储器(例如,rom)、硬盘驱动器(hdd)、固态驱动器(ssd)或光记录介质。存储装置912存储用于由处理器913执行各种处理的计算机程序和在由处理器913执行各种处理时使用的各种数据。另外,在本实施方式中,存储装置912存储地图信息。在地图信息中,除了与道路相关的信息以外,还包含地上供电装置2的设置位置信息等信息。
136.处理器913具有一个或多个cpu及其周边电路。处理器913也可以还具有gpu或者逻辑运算单元或数值运算单元这样的运算电路。处理器913基于存储于服务器91的存储装置912的计算机程序而执行各种运算处理。
137.短程无线通信表示通信距离比广域无线通信短的通信,具体而言,例如表示通信距离小于10米的通信。作为短程无线通信,能够使用通信距离较短的各种近距离无线通信,例如,使用遵循了由ieee、iso、iec等制定的任意的通信标准(例如,bluetooth(注册商标)、zigbee(注册商标))的通信。另外,作为用于进行短程无线通信的技术,例如使用rfid(radio frequency identification:射频识别)、dsrc(dedicated short range communication:专用短程通信)等。如上所述,在本实施方式中,利用短程无线通信,车辆识别信息从车辆3向地上供电装置2发送。
138.在本实施方式中,车辆3的车辆侧第二通信装置72和地上供电装置2的地上侧第二通信装置82通过短程无线通信而直接进行通信。在本实施方式中,车辆侧第二通信装置72发送包含车辆识别信息的信号,地上侧第二通信装置82接收包含车辆识别信息的信号。
139.车辆侧第二通信装置72具有产生电波或磁场的天线和向天线供给电力或电流的发送电路。发送电路具有振荡电路、调制电路及放大电路,将由振荡电路生成的载波利用调制电路根据车辆识别信息而进行调制,使将调制后的载波利用放大电路放大后的交流电流(交流电力)向天线流动。其结果是,在天线中,产生电波或磁场。
140.地上侧第二通信装置82具有接收电波或磁场的天线和从天线接收到的电波或磁场取出信息的接收电路。接收电路具有放大电路及解调电路,将通过利用天线接收到的电波或磁场而生成的微弱电流利用放大电路放大,将放大后的信号利用解调电路解调,从而取出信号中包含的信息(在此是车辆识别信息)。
141.另外,车辆侧第二通信装置72与地上侧第二通信装置82之间的通信可以通过电波来进行,也可以通过磁场(即,通过电磁感应)来进行。尤其是,在载波的频率较低的情况下(例如,50hz~50khz),通过磁场进行通信。在该情况下,作为天线,使用线圈。
142.另外,在本实施方式中,构成为车辆侧第二通信装置72发送信号,地上侧第二通信装置82接收信号。然而,车辆侧第二通信装置72也可以具有接收电路,从而除了信号的发送以外还能够进行接收,另外,地上侧第二通信装置82也可以具有发送电路,从而除了信号的接收以外还能够进行发送。
143.《供电的概略性的流程》
144.接着,对在本实施方式的非接触供电系统1中从地上供电装置2向车辆3进行非接触电力传输时的控制的概略性的流程进行说明。
145.在从地上供电装置2向车辆3进行非接触电力传输时,首先,车辆3的ecu34使车辆侧第一通信装置71将与车辆识别信息建立了关联的车辆信息向地上供电装置2的地上侧第一通信装置81发送。当车辆侧第一通信装置71发送了与车辆识别信息建立了关联的车辆信息时,地上供电装置2的地上侧第一通信装置81经由广域无线通信而接收该车辆信息。尤其是,在本实施方式中,地上供电装置2的地上侧第一通信装置81对于位于地上供电装置2的周围的预定的附近区域内的车辆3,接收该车辆3的车辆信息。
146.如上所述,在地上供电装置2的控制器22的存储器222中存储有有可能利用地上供电装置进行供电的车辆3的车辆识别信息的识别信息列表。当地上侧第一通信装置81从车辆3接收到了与车辆识别信息建立了关联的车辆信息时,地上供电装置2的控制器22将与该车辆信息建立了关联的车辆识别信息登记于识别信息列表。尤其是,在本实施方式中,因为地上侧第一通信装置81接收位于附近区域内的车辆3的车辆信息,所以在识别信息列表中登记位于附近区域内的车辆3的车辆识别信息。
147.当在识别信息列表中哪怕登记有一个车辆3的车辆识别信息时,地上供电装置2的控制器22以能够与车辆侧第二通信装置72进行通信的方式,即以能够从车辆侧第二通信装置72接收车辆识别信息的方式使地上侧第二通信装置82工作(设为后述的“接收待机状态”)。当这样使地上侧第二通信装置82工作时,当从车辆侧第二通信装置72发送着包含车辆识别信息的信号的车辆3接近时,地上侧第二通信装置82能够接收车辆侧第二通信装置72发送的包含车辆识别信息的信号。
148.另外,在向识别信息列表登记了车辆识别信息时,地上供电装置2的控制器22使地上侧第一通信装置81将车辆识别信息被登记到识别信息列表的意思的通知向由该车辆识别信息确定的车辆3发送。另外,如上所述,当在向识别信息列表中登记了车辆识别信息时,地上侧第二通信装置82工作。因此,车辆识别信息被登记到识别信息列表的意思的通知能够说成是表示地上侧第二通信装置82以使地上供电装置2能够利用短程无线通信来接收车辆识别信息的方式工作或正在工作的通知。
149.当车辆侧第一通信装置71从地上侧第一通信装置81经由广域无线通信而接收到车辆识别信息被登记到识别信息列表的意思的通知时,车辆3的ecu34在车辆3接近了地上供电装置2时,以能够将包含车辆识别信息的信号向地上供电装置2的地上侧第二通信装置82发送的方式向车辆侧第二通信装置72供给电力而使其工作,除此以外,以在车辆3在地上供电装置2的上方行驶时能够从地上供电装置2接受电力的方式向受电装置5供给电力而使其工作(后述的“受电激活、信号发送状态”)。
150.在车辆侧第二通信装置72工作而发送包含车辆识别信息的信号且地上侧第二通信装置82以能够与车辆侧第二通信装置72进行通信的方式工作的状态下,当车辆3接近地
上供电装置2时,地上侧第二通信装置82接收从车辆3的车辆侧第二通信装置72发送出的包含车辆识别信息的信号。
151.当地上侧第二通信装置82接收到车辆识别信息时,地上供电装置2的控制器22将接收到的车辆识别信息与识别信息列表进行对照。并且,在接收到的车辆识别信息登记于识别信息列表时,以在车辆3在地上供电装置2的上方行驶时能够向车辆3传输电力的方式向送电侧谐振电路43供给电力(设为后述的“送电激活状态”)。当在这样向地上供电装置2的送电侧谐振电路43供给了电力且车辆3的受电装置5工作了的状态下车辆3移动而车辆3的受电侧谐振电路51位于地上供电装置2的送电侧谐振电路43上时,进行从地上供电装置2向车辆3的供电。然后,当车辆3移动而车辆3的受电装置5从地上供电装置2的送电装置4离开时,供电结束。
152.如以上说明的这样,在本实施方式中,在从地上供电装置2接受电力时,车辆3的ecu34使车辆侧第一通信装置71将与车辆识别信息建立了关联的车辆信息向地上供电装置2的地上侧第一通信装置81发送。除此以外,ecu34在车辆侧第一通信装置71发送了车辆信息后,使车辆侧第二通信装置72将车辆识别信息向地上供电装置2的地上侧第二通信装置82发送。其结果是,地上供电装置2在车辆3在地上供电装置2附近行驶的期间仅需要对车辆识别信息经由短程无线通信而进行接收,无需对其他车辆信息经由短程无线通信而进行接收。因此,即使车辆3的速度稍快,也能够向地上供电装置2发送所需的信息。
153.《利用了广域无线通信的通信》
154.接着,参照图7~图10来对利用了广域无线通信的车辆3、服务器91及地上供电装置2之间的通信及与该通信相关的车辆3、服务器91及地上供电装置2的动作进行说明。图7是与利用了广域无线通信的车辆3、服务器91及地上供电装置2之间的通信相关的动作序列图。
155.如图7所示,车辆3的ecu34取得车辆信息,并且使车辆侧第一通信装置71将取得的车辆信息经由广域无线通信而向服务器91发送(步骤s11)。如上所述,车辆信息包含车辆识别信息、受电装置5的各种参数、车辆3的当前位置信息、车辆要求电力及与电力传输相关的车辆3的其他信息。ecu34从存储器342取得车辆识别信息及受电装置5的各种参数,从gnss接收机35取得车辆3的当前位置信息。另外,ecu34基于车辆3的各种状态而算出车辆要求电力。具体而言,蓄电池32的充电率soc越高则ecu34将车辆要求电力设定得越小,蓄电池32的温度越高则ecu34将车辆要求电力设定得越小。
156.另外,车辆3的ecu34每隔预定的时间间隔地使车辆侧第一通信装置71发送车辆信息。该时间间隔始终一定。或者,该时间间隔也可以根据状况而变化。在该情况下,具体而言,该时间间隔例如以从自gnss接收机35取得的车辆3的当前位置到存储于存储装置36的地上供电装置2的设置位置为止的距离越短则越短的方式设定。
157.服务器91当从能够与服务器91通信的多个车辆3接收到车辆信息时,基于车辆信息中包含的各车辆3的当前位置信息来确定位于各地上供电装置2的附近区域内的车辆3的车辆识别信息(步骤s12)。具体而言,服务器91基于从各车辆3接收到的车辆信息中包含的各车辆3的当前位置信息和保存于服务器91的存储装置912的各地上供电装置2的设置位置信息来确定位于各地上供电装置2的周围的预定的附近区域内的车辆3的车辆识别信息。
158.上述“附近区域”例如设定为距成为对象的地上供电装置2预定的距离(例如,
500m)以内的区域。或者,上述“附近区域”也可以设定为关于去往地上供电装置2的车辆3行驶的车道与成为对象的地上供电装置2相距预定的第一距离以内且关于从地上供电装置2离开的车辆3行驶的车道与成为对象的地上供电装置2相距比第一距离短的预定的第二距离以内的区域。
159.另外,上述“附近区域”也可以是车辆3的速度越快则越大的区域。具体而言,例如,当对于速度为预定的基准速度以下的车辆3某区域被设定为“预定的区域”时,对于速度比预定的基准速度快的车辆,包含上述某区域且比上述某区域大的区域被设定为“附近区域”。在该情况下,车辆3的速度越快,则车辆信息由车辆侧第一通信装置71经由服务器91而向地上供电装置2发送时的从车辆3的当前位置到地上供电装置2的设置位置为止的距离越长。
160.服务器91每隔预定的时间间隔地确定位于各地上供电装置2的附近区域内的车辆3的车辆识别信息。该时间间隔优选与车辆3的ecu34向服务器91发送车辆信息的最短的时间间隔为相同程度。
161.服务器91当确定了位于各地上供电装置2的附近区域内的车辆3的车辆识别信息时,将与确定出的车辆识别信息建立了关联的车辆3的车辆信息经由通信网络92而向各地上供电装置2发送(步骤s13)。因此,从服务器91向各地上供电装置2发送位于该地上供电装置2的周围的附近区域内的车辆3的车辆信息。在此时发送的车辆信息中,除了车辆识别信息以外,还包含地上供电装置2的向车辆3的供电所需的信息。
162.当地上供电装置2的地上侧第一通信装置81从服务器91接收到车辆信息时,地上供电装置2的控制器22基于与接收到的车辆信息建立了关联的车辆识别信息而进行车辆识别信息相对于识别信息列表的登记、擦除(步骤s14)。具体而言,在本实施方式中,控制器22进行车辆识别信息相对于识别信息列表的登记、擦除,以成为与接收到的车辆信息建立了关联的车辆识别信息不多不少地被登记到识别信息列表的状态。
163.地上供电装置2的控制器22当将车辆识别信息相对于识别信息列表登记、擦除后,使地上侧第一通信装置81将登记于识别信息列表的车辆识别信息经由通信网络92而向服务器91发送(步骤s15)。控制器22每隔预定的时间间隔地将车辆识别信息向服务器91发送。此时,控制器22发送登记于识别信息列表的全部车辆识别信息。另外,控制器22也可以仅发送新向识别信息列表登记的车辆识别信息及被从识别信息列表擦除的车辆识别信息。在该情况下,控制器22也可以不是每隔预定的时间间隔,而是每当记载于识别信息列表的车辆识别信息变化时,向服务器91发送车辆识别信息。
164.服务器91当从地上供电装置2接收到登记于识别信息列表的车辆识别信息时,向与登记于识别信息列表的车辆识别信息对应的车辆3发送车辆识别信息已登记于识别信息列表的意思的通知(以下,称作“列表登记通知”)(步骤s16)。在本实施方式中,列表登记通知每隔一定的时间间隔地发送。在列表登记通知中,也可以包含车辆识别信息登记于识别信息列表的地上供电装置2的识别信息或设置位置信息。其结果是,在任一地上供电装置2的识别信息列表中登记了车辆3的车辆识别信息时,向该车辆3发送列表登记通知。另一方面,在所有地上供电装置2的识别信息列表中都未登记车辆3的车辆识别信息列表时,不向该车辆3发送列表登记通知。因此,各车辆3能够始终掌握自己的车辆识别信息是否登记于任一地上供电装置2。另外,在从服务器91仅接收新登记或被擦除的车辆识别信息时,服务
器91将车辆识别信息被登记到识别信息列表的意思或被擦除了的意思的通知发送给与该车辆识别信息对应的车辆3。
165.在图7所示的动作序列图中,仅基于车辆3是否位于地上供电装置2的附近区域来决定车辆识别信息相对于该地上供电装置2的识别信息列表的登记/擦除。因此,车辆3的车辆识别信息基本上在车辆3驶出到地上供电装置2的附近区域外时被从该地上供电装置2的识别信息列表擦除。然而,车辆识别信息相对于地上供电装置2的识别信息列表的登记/擦除也可以基于其他要因来进行。具体而言,例如,也可以在某地上供电装置2中向车辆3的供电结束了的情况下,从该地上供电装置2的识别信息列表擦除该车辆3的车辆识别信息。另外,还可以在从车辆3要求了从特定的地上供电装置2的识别信息列表擦除该车辆3的车辆识别信息的情况下,从该地上供电装置2的识别信息列表擦除该车辆3的车辆识别信息。
166.图8是与利用了广域无线通信的车辆3、服务器91及地上供电装置2之间的通信相关的与图7相同的动作序列图。尤其是,图8示出了从地上供电装置2向车辆3的供电结束后的动作。
167.当车辆3的从地上供电装置2的受电结束后(步骤s21),车辆3的ecu34使车辆侧第一通信装置71向服务器91发送受电结束信息(步骤s22)。受电结束信息包含与从地上供电装置2的受电相关的信息。具体而言,受电结束信息例如包含车辆3的车辆识别信息、从地上供电装置2的受电电力、受电效率及受电中及受电前后的与车辆3的受电相关的异常检测结果等。另外,除此以外,受电结束信息也可以包含受电期间(例如,开始时刻及结束时刻)、从地上供电装置2的受电电力量等。受电结束信息中包含的各种参数的值基于从地上供电装置2的受电中的车辆侧传感器37的输出等而在ecu34中算出。
168.另外,当地上供电装置2的向车辆3的送电结束后(步骤s23),地上供电装置2的控制器22使地上侧第一通信装置81向服务器91发送送电结束信息(步骤s24)。送电结束信息包含与向车辆3的送电相关的信息。具体而言,送电结束信息例如包含地上供电装置2的识别信息、车辆3的车辆识别信息、向车辆3的送电电力、送电效率及送电中及送电前后的与车辆3的送电相关的异常检测结果等。另外,除此以外送电结束信息也可以包含送电期间(例如,开始时刻及结束时刻)、向车辆3的送电电力量等。送电结束信息中包含的各种参数的值基于向车辆3的送电中的地上侧传感器23的输出等而在控制器22中算出。
169.服务器91当分别从车辆3及地上供电装置2接收到关于同一车辆3的相同期间的受电结束信息和送电结束信息时,进行关于从地上供电装置2向车辆3的对应的供电的供电结束处理(步骤s25)。在供电结束处理中,基于受电结束信息及送电结束信息,进行从地上供电装置2向车辆3的供电电力量的算出、基于算出的供电电力量的对于车辆3的使用者的收费处理、地上供电装置2的送电装置4及车辆3的受电装置5的异常诊断等。从地上供电装置2向车辆3的供电电力量例如基于从地上供电装置2的受电电力及向车辆3的送电电力的时间推移而算出。另外,在对于车辆3的使用者的收费处理中,例如,向使用者的支付账户进行与从地上供电装置2向车辆3的供电电力量对应的收费。另外,在送电装置4及受电装置5的异常诊断中,例如,在受电结束信息中包含的受电电力与送电结束信息中包含的送电电力之间存在较大的差别的情况下,诊断为送电装置4或受电装置5存在异常。
170.另外,供电结束处理每当在一个地上供电装置2中向车辆3的供电结束时(因此,每当车辆3的受电装置5通过一个送电装置4上时)进行。因此,在供电结束处理中,关于一个地
上供电装置2的向车辆3的供电进行供电电力量等的算出。然而,供电结束处理也可以每当在多个地上供电装置2中向车辆3的供电结束时(因此,每当车辆3的受电装置5通过多个送电装置4上时)进行。在该情况下,在供电结束处理中,算出在多个地上供电装置2中向车辆3供电的总供电电力量等。
171.与供电结束处理无关地,与图7中的步骤s11相同地,从车辆3向服务器91发送车辆信息(步骤s26),与图7中的步骤s12相同地,服务器91基于车辆信息而确定位于各地上供电装置2的附近区域内的车辆3的车辆识别信息(步骤s27)。并且,当在某地上供电装置2中已经在进行了对于某车辆3的供电结束处理时,服务器91从在步骤s27中确定出的该地上供电装置2的附近区域内的车辆3的车辆识别信息删除已经进行了供电结束处理的车辆3的车辆识别信息(步骤s28)。
172.然后,服务器91将与被确定为位于各地上供电装置2的附近区域内的车辆3的车辆识别信息中的在步骤s28中未被删除的车辆识别信息建立了关联的车辆信息向各地上供电装置2发送(步骤s29)。当向各地上供电装置2发送了车辆信息后,地上供电装置2的控制器22与图7中的步骤s14相同地进行车辆识别信息相对于识别信息列表的登记、擦除(步骤s30)。然后,与图7中的步骤s15相同地,进行登记于识别信息列表的车辆识别信息的发送(步骤s31),与图7中的步骤s16相同地,发送列表登记通知(步骤s32)。
173.另外,也可以是,在服务器91从车辆3接收到从特定的地上供电装置2的识别信息列表擦除该车辆3的车辆识别信息的要求(例如,参照图14而后述的“识别信息擦除要求”等)的情况下,与步骤s28相同地,从该地上供电装置2的附近区域内的车辆3的车辆识别信息删除该车辆3的车辆识别信息。
174.其结果是,在进行图8所示的处理的情况下,在识别信息列表中登记有位于各地上供电装置2的附近区域内且从该地上供电装置2的供电未结束且未被要求识别信息擦除的车辆3的车辆识别信息。并且,车辆3在车辆3的车辆识别信息登记于任一地上供电装置2的识别信息列表时,接收列表登记通知。
175.图9是示出服务器91中的与利用了广域无线通信的通信相关的处理的流程的流程图。图9所示的处理在服务器91的处理器913中每隔一定时间间隔地执行。
176.首先,服务器91的处理器913取得从车辆3及地上供电装置2接收到的各种信息(步骤s41)。各种信息包括从各车辆3接收并保存于服务器91的存储装置912的与车辆信息及车辆识别信息建立了关联的受电结束信息。另外,各种信息包括从各地上供电装置2接收并保存于服务器91的存储装置912的与车辆识别信息建立了关联的送电结束信息。
177.接着,服务器91的处理器913判定是否分别从车辆3及地上供电装置2接收到与同一车辆识别信息建立了关联的受电结束信息和送电结束信息(步骤s42)。在步骤s42中判定为接收到对应的受电结束信息和送电结束信息的情况下,服务器91的处理器913执行上述的供电结束处理(步骤s43)。另一方面,在步骤s42中判定为未接收到对应的受电结束信息和送电结束信息的情况下,跳过步骤s43。
178.接着,服务器91的处理器913基于在步骤s41中取得的车辆3的车辆信息(尤其是,当前位置信息)及各地上供电装置2的设置位置信息等而确定位于各地上供电装置2的附近区域内的车辆3的车辆识别信息(步骤s44)。各地上供电装置2的附近区域例如预先存储于服务器91的存储装置912。
179.接着,服务器91的处理器913在某地上供电装置2中已经进行了对于某车辆3的供电结束处理的情况下,从在步骤s44中确定出的位于该地上供电装置2的附近区域内的车辆3的车辆识别信息删除已经进行了供电结束处理的该车辆3的车辆识别信息(步骤s45)。然后,服务器91的处理器913将与被确定为位于各地上供电装置2的附近区域内的车辆3的车辆识别信息中的在步骤s45中未被删除的车辆识别信息建立了关联的车辆信息向各地上供电装置2发送(步骤s46)。
180.图10是示出地上供电装置2中的与利用了广域无线通信的通信相关的处理的流程的流程图。图10所示的处理在地上供电装置2的控制器22的处理器223中每当地上供电装置2的地上侧第一通信装置81从服务器91接收到与车辆识别信息建立了关联的车辆信息时执行。
181.当地上侧第一通信装置81接收到与位于地上供电装置2的附近区域内的车辆3的车辆识别信息建立了关联的车辆信息时(步骤s51),处理器223将接收到的车辆信息中包含的车辆识别信息和存储于存储器342的识别信息列表内的车辆识别信息进行对照(步骤s52)。
182.然后,处理器223将在步骤s52中对照了车辆识别信息的结果是接收到的车辆信息中包含的车辆识别信息中的还未登记于识别信息列表的车辆识别信息新向识别信息列表登记(步骤s53)。除此以外,处理器223将已经登记于识别信息列表的车辆识别信息中的未包含于从服务器91接收到的车辆信息中包含的车辆识别信息的车辆识别信息从识别信息列表擦除(步骤s54)。其结果是,在识别信息列表中,始终登记有位于各地上供电装置2的附近区域内的车辆3的车辆识别信息。然后,处理器223使地上侧第一通信装置81将登记于识别信息列表的车辆识别信息经由通信网络92而向服务器91发送(步骤s55)。
183.《与供电相关的车辆及地上供电装置的状态及动作》
184.接着,参照图11~图15来对与从地上供电装置2向车辆3的供电相关的车辆3及地上供电装置2的状态及动作进行说明。
185.首先,参照图11,对进行从地上供电装置2向车辆3的供电时的车辆3及地上供电装置2的动作及状态的粗略的推移进行说明。图11是概略性地示出车辆3接近地上供电装置2而进行供电时的车辆3及地上供电装置2的动作及状态的推移的图。另外,在图11所示的例子中,为了使说明简单,示出了车辆3只有一台且地上供电装置2也只有一个的情况下的推移。另外,在图11中,长方形表示车辆3或地上供电装置2的状态,圆角的四边形表示车辆3或地上供电装置2的动作。
186.在图11所示的例子中,在最初的状态下,车辆3从地上供电装置2离开得相当远,位于地上供电装置2的附近区域外。因此,在地上供电装置2的识别信息列表中未登记车辆3的车辆识别信息。因此,也未向车辆3发送列表登记通知。
187.在该状态下,从地上供电装置2向车辆3的供电目前不开始。因此,车辆3的状态被设定为向与受电相关的设备仅供给待机电力而不向车辆侧第二通信装置72供给电力的休眠状态(步骤s61)。另外,地上供电装置2的状态也被设定为仅被供给待机电力而不向地上侧第二通信装置82供给电力的休眠状态(步骤s81)。
188.然后,当车辆3进入到地上供电装置2的附近区域内时,如上所述,向地上供电装置2的识别信息列表登记车辆3的车辆识别信息(步骤s82)。另外,伴随于此,车辆3接收通知在
地上供电装置2的识别信息列表中登记有车辆识别信息的列表登记通知(步骤s62)。
189.当向地上供电装置2的识别信息列表登记了车辆识别信息时,地上供电装置2的状态被设定为向地上侧第二通信装置82供给电力的接收待机状态(步骤s83)。在接收待机状态下,当以距地上侧第二通信装置82较近的距离从车辆侧第二通信装置72发送了信号时,地上侧第二通信装置82能够接收该信号。另外,当车辆3接收到列表登记通知时,车辆3的状态被设定为向与车辆3的受电相关的设备供给工作用的电力并且向车辆侧第二通信装置72供给电力并发送包含车辆3的车辆识别信息的信号的受电激活、信号发送状态(步骤s63)。在受电激活、信号发送状态下,当车辆3的受电装置5的受电侧谐振电路51位于地上供电装置2的送电装置4的送电侧谐振电路43上时,受电侧谐振电路51能够从送电侧谐振电路43受电。
190.然后,当车辆3接近地上供电装置2而地上侧第二通信装置82能够接收从车辆侧第二通信装置72发送出的信号时(步骤s64),从车辆侧第二通信装置72向地上侧第二通信装置82发送包含车辆识别信息的信号,地上侧第二通信装置82接收从车辆侧第二通信装置72发送出的该信号(步骤s84)。
191.由于在短程无线通信中通信范围较小,所以地上侧第二通信装置82接收从车辆侧第二通信装置72发送出的信号表示由接收到的车辆识别信息确定的车辆3到达至地上供电装置2的附近。因此,在本实施方式中,当地上侧第二通信装置82接收到包含车辆识别信息的信号时,地上供电装置2的状态被设定为送电激活状态(步骤s85)。在送电激活状态下,向地上供电装置2的送电侧谐振电路43供给微弱电力。
192.然后,在车辆3的状态被设定为受电激活状态且地上供电装置2的状态被设定为送电激活状态的状态下,当车辆3的受电侧谐振电路51接近地上供电装置2的送电侧谐振电路43而位于送电侧谐振电路43上时(步骤s65),在送电侧谐振电路43与受电侧谐振电路51之间产生磁场谐振耦合,向地上供电装置2的送电侧谐振电路43流动的电流增大。当这样向送电侧谐振电路43流动的电流增大时,地上供电装置2的状态被设定为向送电侧谐振电路43供给较大的电力的正式送电状态(步骤s86)。此时,在送电侧谐振电路43与受电侧谐振电路51之间产生强力的磁场谐振耦合,由此从送电侧谐振电路43向受电侧谐振电路51供给电力,由此从地上供电装置2向车辆3供电。
193.然后,当车辆3移动而车辆3的受电侧谐振电路51离开了地上供电装置2的送电侧谐振电路43时(步骤s66),在送电侧谐振电路43与受电侧谐振电路51之间产生的磁场谐振耦合变弱,向地上供电装置2的送电侧谐振电路43流动的电流下降。当这样向送电侧谐振电路43流动的电流下降时,向送电侧谐振电路43供给的电力下降,地上供电装置2的状态返回到送电激活状态(步骤s87)。
194.然后,当车辆3从地上供电装置2的送电侧谐振电路43进一步离开而送电侧谐振电路43与受电侧谐振电路51之间的磁场谐振耦合消失时,在车辆3中进行受电结束处理(步骤s67)。在受电结束处理中,算出构成受电结束信息的参数的值,并且将算出的受电结束信息从车辆3向服务器91发送。另外,此时,在地上供电装置2中进行送电结束处理(步骤s88)。在送电结束处理中,算出构成送电结束信息的参数的值,并且将算出的送电结束信息从地上供电装置2向服务器91发送。在地上供电装置2中,当进行了送电结束处理时,向送电侧谐振电路43的电流的供给停止,由此地上供电装置2的状态再次被设定为接收待机状态(步骤
s89)。
195.然后,若车辆3从地上供电装置2的附近区域退出时,如上所述,从地上供电装置2的识别信息列表擦除车辆3的车辆识别信息(步骤s90)。另外,伴随于此,车辆3不再接收通知在地上供电装置2的识别信息列表中登记有车辆识别信息的列表登记通知(步骤s68)。当从识别信息列表擦除了车辆3的车辆识别信息时,在地上供电装置2附近不再存在需要供电的车辆3,所以地上供电装置2的状态恢复为休眠状态(步骤s91)。另外,当车辆3不再接收列表登记通知时,在车辆3的附近没有地上供电装置2,所以车辆3的状态也恢复为休眠状态(步骤s69)。
196.《地上供电装置的状态及动作的转变》
197.接着,参照图12及图13来对地上供电装置2的状态及动作的转变进行说明。图12及图13是概略性地示出地上供电装置2的状态及动作的转变的图。尤其是,图12示出了车辆3不位于地上供电装置2的附近时的状态及动作的转变,具体而言示出休眠状态与接收待机状态之间的状态及动作的转变。另一方面,图13示出了车辆3位于地上供电装置2的附近时的状态及动作的转变,具体而言示出了接收待机状态、送电激活状态、正式送电状态及待机状态之间的状态及动作的转变。另外,在图12及图13中也是,长方形表示地上供电装置2的状态,圆角的四边形表示地上供电装置2的动作。
198.在地上供电装置2的状态处于图12所示的休眠状态(a11。图11的步骤s81及步骤s91中的状态)时,向地上供电装置2仅供给待机电力。因此,此时,仅向地上供电装置2的控制器22供给所需最低限度的待机电力,不向与向车辆3的送电相关的其他的设备供给电力。例如,不向送电侧谐振电路43、地上侧第二通信装置82、地上侧传感器23及交流电力产生电路64供给电力,另外,对于控制器22也只供给较小的电力。因此,在地上供电装置2的状态处于休眠状态时,与地上供电装置2的送电相关的设备的消耗电力小。不过,即使在地上供电装置2的状态处于休眠状态时,也向地上侧第一通信装置81供给电力。因此,能够从服务器91接收位于地上供电装置2的附近区域内的车辆3的车辆识别信息。
199.在地上供电装置2的状态处于休眠状态(a11)时地上侧第一通信装置81接收车辆信息而车辆信息中包含的车辆识别信息被登记到识别信息列表的情况(c11)下,开始进行向与地上供电装置2的送电相关的设备的电力供给,这些设备被启动并且进行这些设备的自我诊断(b12)。具体而言,向控制器22供给足以供控制器22完全工作的电力,并且向地上侧第二通信装置82、地上侧传感器23、交流电力产生电路64等供给电力。另外,在控制器22中执行自我诊断程序,进行控制器22、地上侧第二通信装置82及地上侧传感器23等的自我诊断。
200.当完成了这样的设备的启动及自我诊断时(c12),地上供电装置2的状态成为接收待机状态(a13。图11中的步骤s83及s89中的状态)。在地上供电装置2的状态处于接收待机状态(a13)时,向地上侧第二通信装置82供给电力,而地上侧第二通信装置82能够接收信号。除此以外,在本实施方式中,在地上供电装置2的状态处于接收待机状态时,也向控制器22、地上侧传感器23及交流电力产生电路64等供给充分的电力。因此,在地上供电装置2的状态处于接收待机状态时,当以距地上侧第二通信装置82较近的距离从车辆侧第二通信装置72发送信号时,地上侧第二通信装置82能够接收该信号。另一方面,在地上供电装置2的状态处于接收待机状态(a13)时,不向地上供电装置2的送电侧谐振电路43供给电力。因此,
即使假设车辆3的受电侧谐振电路51向地上供电装置2的送电侧谐振电路43接近,也不进行从地上供电装置2向车辆3的供电。另外,在地上供电装置2的状态处于接收待机状态时,不向地上供电装置2的送电侧谐振电路43供给电力,因此地上供电装置2的消耗电力不那么大。
201.在地上供电装置2的状态处于接收待机状态(a13)时,在成为了在地上供电装置2的识别信息列表中车辆识别信息一个也未登记的状态的情况(c13)下,目前车辆3不会来到该地上供电装置2附近,因此地上供电装置2的状态恢复为休眠状态(a11)。
202.另一方面,如图13所示,在地上供电装置2的状态处于接收待机状态(a13)时,当车辆3接近地上供电装置2时,地上供电装置2的地上侧第二通信装置82接收从车辆侧第二通信装置72发送出的包含车辆识别信息的信号(c14)。当地上侧第二通信装置82接收到包括车辆识别信息的信号时,信号中包含的车辆识别信息作为供电中的车辆3的车辆识别信息而向控制器22的存储器222存储。除此以外,对信号中包含的车辆识别信息与存储于存储器222的识别信息列表中登记的车辆识别信息进行对照(b14)。
203.车辆3的车辆识别信息事先经由车辆侧第一通信装置71及地上侧第一通信装置81而向地上供电装置2发送,所以从车辆侧第二通信装置72发送出的信号中包含的车辆识别信息基本上登记于识别信息列表。然而,存在例如因车辆侧第一通信装置71故障等而该车辆识别信息未事先登记于识别信息列表的情况。在这样车辆识别信息未登记于识别信息列表的情况(c19)下,不进行从地上供电装置2向车辆3的供电而进行结束送电的送电结束处理(b19)。另外,在信号中包含的车辆识别信息与登记于识别信息列表的车辆识别信息的对照中后述的结束条件成立了的情况(c19)下,也进行结束送电的送电结束处理(b19)。关于送电结束处理的详情后述。
204.另一方面,在对照的结果是从车辆侧第二通信装置72接收到的信号中包含的车辆识别信息已登记于识别信息列表的情况(c15)下,判定后述的中断条件是否成立,在中断条件不成立的情况(c18)下,地上供电装置2的状态从接收待机状态(a13)被切换为送电激活状态(a16。图11中的步骤s85及s87中的状态)。
205.在地上供电装置2的状态处于送电激活状态(a16)时,与处于接收待机状态(a13)时相同地,向地上侧第二通信装置82、控制器22、地上侧传感器23及交流电力产生电路64等供给电力。除此以外,此时,向地上供电装置2的送电侧谐振电路43供给微弱电力。通过向送电侧谐振电路43供给微弱电力,而当车辆3的受电侧谐振电路51接近地上供电装置2的送电侧谐振电路43而位于送电侧谐振电路43上时,在送电侧谐振电路43与受电侧谐振电路51之间产生磁场谐振耦合,向送电侧谐振电路43流动的电流增大。
206.因此,在地上供电装置2的状态处于送电激活状态(a16)时向送电侧谐振电路43流动的电流增大了的情况(c21)下,意味着车辆3的受电侧谐振电路51移动到地上供电装置2的送电侧谐振电路43的上方。于是,在该情况下,地上供电装置2的状态切换为正式送电状态(a17。图11中的步骤s86中的状态)。
207.在地上供电装置2的状态处于正式送电状态(a17)时,与处于接收待机状态(a13)时相同地,向地上侧第二通信装置82、控制器22、地上侧传感器23及交流电力产生电路64等供给电力。除此以外,此时,为了向车辆3的送电,向地上供电装置2的送电侧谐振电路43供给比送电激活状态(a16)大的电力。其结果是,在送电侧谐振电路43与受电侧谐振电路51之
间产生强力的磁场谐振耦合,从地上供电装置2的送电装置4向车辆3的受电装置5供给较大的电力。尤其是,在本实施方式中,此时向送电侧谐振电路43供给的电力基于与车辆识别信息建立了关联的车辆信息中包含的要求供电电力而设定。具体而言,要求供电电力越大,则向送电侧谐振电路43供给的电力越大。要求供电电力例如在车辆3的速度较慢而受电侧谐振电路51位于送电侧谐振电路43上的时间较长的情况下,在从送电装置4向受电装置5的供电中变化。在该情况下,根据要求供电电力的变化,而向送电侧谐振电路43供给的电力也变化。
208.在地上供电装置2的状态处于正式送电状态(a17)时,当车辆3的受电侧谐振电路51离开了地上供电装置2的送电侧谐振电路43时,如上所述,向地上供电装置2的送电侧谐振电路43流动的电流下降。在这样向地上供电装置2的送电侧谐振电路43流动的电流下降了的情况(c22)下,地上供电装置2的状态从正式送电状态(a17)切换为送电激活状态(a16)。除此以外,在地上供电装置2的状态处于正式送电状态时后述的结束条件成立了的情况或后述的中断条件成立了的情况下,地上供电装置2的状态也向送电激活状态(a16)切换。其结果是,在结束条件成立而结束送电的情况或中断条件成立而中断送电的情况下,地上供电装置2的状态暂时成为送电激活状态(a16),由此,可抑制向送电侧谐振电路43的供给电力急剧地下降为零。因此,可降低由向送电侧谐振电路43的供给电力急剧地下降为零引起的对于送电侧谐振电路43等设备的负荷。
209.在地上供电装置2的状态处于送电激活状态(a16)时中断条件成立了的情况(c23)或在从车辆侧第二通信装置72接收到的信号中包含的车辆识别信息登记于识别信息列表时中断条件成立了的情况(c17)下,地上供电装置2的状态切换为待机状态(a18)。
210.地上供电装置2的待机状态是基本上与接收待机状态相同的状态。因此,在地上供电装置2的状态处于待机状态(a18)时,向地上侧第二通信装置82、控制器22、地上侧传感器23及交流电力产生电路64等供给充分的电力,另一方面,不向送电侧谐振电路43供给电力。因此,在地上供电装置2的状态处于待机状态(a18)时,不进行从地上供电装置2向车辆3的供电,另外,与接收待机状态相同地,消耗电力不那么大。
211.在此,中断条件是需要暂时中断从地上供电装置2向车辆3的送电的条件。以下,列举中断条件的具体的例子。可以使用以下列举的全部中断条件,也可以不使用一部分的中断条件。在本实施方式中,在以下的中断条件中的任一个成立的情况下,地上供电装置2的状态切换为待机状态(a18)。
212.第一个中断条件是地上供电装置2的地上侧第一通信装置81与服务器91之间的通信的中断。在此,地上侧第一通信装置81定期地与服务器91进行通信,例如接收供电中的车辆3的车辆信息(尤其是,要求供电电力等)。并且,地上供电装置2基于接收到的车辆信息来进行向车辆3的送电。因此,当不再能够接收车辆3的车辆信息时,地上供电装置2不再能够适当地控制供电。因此,在通信中断时向车辆3的送电暂时中断。
213.第二个中断条件是地上供电装置2的送电装置4的温度,尤其是送电侧整流电路41、变换器42或送电侧谐振电路43的温度为预定的中断基准温度以上。为了抑制送电装置4的温度过剩地过高,当该中断条件成立时,向车辆3的送电暂时中断。送电装置4的温度由地上侧传感器23(送电装置温度传感器)检测。
214.第三个中断条件是在送电装置4上行驶的车辆3的速度为预先确定的中断基准速
度以上。当车辆3的速度为中断基准速度以上时,供电效率下降,因此,当该中断条件成立时,向车辆3的送电暂时中断。车辆3的速度例如基于从送电装置4向受电装置5的供电电力的推移而算出。
215.第四个中断条件是检测到在埋入有送电装置4的道路上存在异物或生物。当在送电装置4上存在异物或生物时,由送电侧谐振电路43生成的交流磁场会变化,伴随于此而供电效率有可能下降,因此,当该中断条件成立时,向车辆3的送电暂时中断。通过地上侧传感器23(异物传感器、生物传感器)检测埋入有送电装置4的道路上的异物或生物。
216.第五个中断条件是向送电装置4的送电侧谐振电路43供给的电力(或电流、电压)为预先确定的中断基准值以上。当向送电侧谐振电路43的供给电力过剩地变大时,有可能送电侧谐振电路43产生了异常,因此,当该中断条件成立时,向车辆3的送电暂时被中断。向送电侧谐振电路43的供给电力基于地上侧传感器23(送电装置电流传感器、送电装置电压传感器)的输出而算出。
217.另外,也可以将在一定期间内地上供电装置2的地上侧第二通信装置82未接收到从车辆侧第二通信装置72发送出的包含车辆识别信息的信号设为中断条件(第六个中断条件)。在该情况下,在地上侧第二通信装置82接收到该信号的期间,中断条件不成立,由此,地上供电装置2维持为送电激活状态。然而,当地上侧第二通信装置82不再接收到该信号时,中断条件成立,由此,地上供电装置2切换为待机状态。
218.另外,在本实施方式中,在地上供电装置2的状态处于接收待机状态时,当地上侧第二通信装置82接收到包含车辆识别信息的信号时,地上供电装置2的状态切换为送电激活状态。在送电激活状态下,如上所述,向地上供电装置2的送电侧谐振电路43供给微弱电力,当车辆3接近时向送电侧谐振电路43流动的电流增大,供电开始。因此,在本实施方式中,当地上侧第二通信装置82接收到包含车辆识别信息的信号时,允许为了向受电装置的供电而向送电装置供给电力。
219.并且,在本实施方式中,地上侧第二通信装置82一旦接收到包含车辆识别信息的信号,则直到中断条件、结束条件成立为止,地上供电装置2的状态维持为送电激活状态,由此,继续向送电装置4的电力的供给。
220.不过,如上所述,在将地上侧第二通信装置82未接收到从车辆侧第二通信装置72发送出的包含车辆识别信息的信号设为中断条件的情况下,当地上侧第二通信装置82不再从车辆3接收到该信号时,禁止为了向受电装置5的供电而向送电装置4供给电力。
221.在地上供电装置2的状态处于待机状态(a18)时上述的中断条件都不再成立的情况(c24)下,地上供电装置2的状态切换为送电激活状态(a16)。
222.在地上供电装置2的状态处于送电激活状态(a16)时结束条件成立了的情况(c25)、在地上供电装置2的状态处于待机状态(a18)时结束条件成立了的情况(c26)等结束条件成立了的情况下,进行送电结束处理(b19。图11中的步骤s88中的动作)。
223.在送电结束处理中,从地上供电装置2的地上侧第一通信装置81向服务器91发送送电结束信息。如上所述,送电结束信息包含与向车辆3的送电相关的信息。送电结束信息中包含的各种参数的值基于地上侧传感器23的输出等而算出。除此以外,在送电结束处理中,将通过b14所示的动作而存储于地上供电装置2的存储器222的供电中的车辆3的车辆识别信息从存储器222擦除。当送电结束处理完成后,地上供电装置2的状态被切换为接收待
机状态(a13)。
224.在此,结束条件是需要结束从地上供电装置2向车辆3的送电的条件。以下,列举结束条件的具体的例子。可以使用以下列举的全部结束条件,也可以不使用一部分的结束条件。在本实施方式中,在以下的结束条件中的任一个成立的情况下,进行送电结束处理。
225.第一个结束条件是检测到接近了地上供电装置2的车辆3从地上供电装置2离开了。当车辆3通过地上供电装置2的送电装置4时,不会从地上供电装置2向该车辆3进一步送电,因此,在该结束条件成立了的情况下向车辆3的送电结束。车辆3从地上供电装置2离开了通过任意的手法来检测。具体而言,例如,通过不再由地上侧第二通信装置82接收到车辆侧第二通信装置72发送出的信号,来检测车辆3从地上供电装置2离开了。另外,例如,也可以将在横向偏移检测装置中使用的磁场检测器在车辆3的行进方向上配置于送电装置4的后方,通过利用该磁场检测器检测从车辆3的交流磁场产生电路61产生的交流磁场来检测车辆3从地上供电装置2离开了。
226.第二个结束条件是地上供电装置2的地上侧第二通信装置82接收到包含与在b14所示的动作中存储于地上供电装置2的存储器222的供电中的车辆3的车辆识别信息不同的车辆识别信息的信号。换言之,第二个结束条件是地上侧第二通信装置82接收到与正在送电的车辆3或即刻之前送电完成的车辆3不同的车辆的车辆识别信息。在这样后续车辆迫近到地上侧第二通信装置82接收包含车辆识别信息的信号的程度的情况下,需要避免送电中的车辆和后续车辆的送电信息的混同,因此向车辆3的送电结束。如上所述,若通过该结束条件的成立而及早进行送电结束处理,则能够将存储于地上供电装置2的存储器222的供电中的车辆3的车辆识别信息从存储器222及早删除,由此,在向后续车辆的送电开始前能够删除供电中的车辆3的车辆识别信息。
227.第三个结束条件是从供电中的车辆3的车辆识别信息登记到地上供电装置2的存储器222起的经过时间为预定的结束基准时间以上。当经过时间过长时,有可能产生了地上供电装置2未能检测到车辆3离开了等异常,因此,当该结束条件成立时,向车辆3的送电结束。另外,第三个结束条件只要是表示车辆3长期占有着地上供电装置2的送电装置上的条件即可,也可以是其他条件。因此,例如,第三个结束条件也可以是从供电中的车辆3的车辆识别信息登记到存储器222起的经过时间中的地上供电装置2的状态是送电激活状态或待机状态的时间为预定时间以上。
228.第四个结束条件是与向地上供电装置2的车辆3的送电相关的设备产生了故障。在地上供电装置2产生了故障时,无法从地上供电装置2向车辆3适当地供电,因此,在该结束条件成立时,向车辆3的送电结束。地上供电装置2的故障例如通过与地上供电装置2的向车辆3的送电相关的设备的自我诊断(在由b12表示的动作中也在进行)来检测。
229.第五个结束条件是从非接触供电系统1的外部存在结束要求。例如,在地上供电装置2附近开始了道路施工的情况或发生了灾害的情况下,从非接触供电系统1的外部向地上供电装置2发送结束要求。该结束要求从非接触供电系统1外的系统向服务器91发送,从服务器91向地上侧第一通信装置81发送。
230.第六个结束条件是地上供电装置2的送电侧谐振电路43与车辆3的受电侧谐振电路51的耦合系数为预定的基准值以上或者从地上供电装置2向车辆3的送电电力为预定的结束基准值以上。在此,在耦合系数非常大的情况或送电电力非常大的情况下,有可能向送
电装置4、受电装置5流动过剩的电流。因此,在耦合系数为基准值以上的情况或送电电力为基准值以上的情况下,通过结束从地上供电装置2向车辆3的送电,而可抑制向送电装置4、受电装置5流动过剩的电流。从地上供电装置2向车辆3的送电电力例如基于地上侧传感器23(送电装置电流传感器及送电装置电压传感器)的输出而算出。
231.第七个结束条件是基于从地上供电装置2向车辆3的送电电力而算出的向车辆3的使用者的收费金额成为了预定的上限收费金额以上。向使用者的收费金额基于向车辆3的送电中的送电电力的推移和此时的每单位电力的费用而由控制器算出。另外,上限收费金额可以是预先确定的一定值,也可以是由车辆3的使用者设定的值。在是由使用者设定的值的情况下,上限收费金额包含于从车辆3发送的车辆信息。
232.第八个结束条件是从车辆3接收到后述的送电停止要求。如后所述,当在车辆3中使受电装置5的受电中止或切断的中止条件或切断条件成立时,从车辆3的车辆侧第一通信装置71发送送电停止要求。当该中止条件或切断条件成立时,在车辆3中不会进一步受电,由此,无需将地上供电装置2维持为能够向车辆3送电的状态,因此向车辆3的送电结束。
233.地上供电装置2的状态及动作的控制由控制器22进行。因此,例如,在地上供电装置2的状态处于待机状态时,控制器22基于地上侧传感器23的输出等而判定中断条件是否成立及结束条件是否成立。并且,控制器22在判定为中断条件不成立的情况下,以向送电侧谐振电路43供给微弱电流的方式控制变换器42。
234.《车辆的状态及动作的转变》
235.接着,参照图14及图15来对车辆3的状态及动作的转变进行说明。图14是概略性地示出车辆3的状态及动作的转变的图。在图14中也是,长方形表示车辆3的状态,圆角的四边形表示车辆3的动作。
236.如图14所示,车辆3的状态可取第一休眠状态(a31)和第二休眠状态(a35)这两个休眠状态(图11中的步骤s61及s69中的状态)。在车辆3的状态处于其中的第一休眠状态(a31)时,向与车辆3的受电相关的设备仅供给待机电力。因此,此时,仅向车辆3的ecu34供给所需最低限度的待机电力,不向与从地上供电装置2的受电相关的其他设备供给电力。因此,例如,不向车辆侧第二通信装置72、磁场检测器66、车辆侧传感器37、物体传感器39及生物传感器40供给电力,另外,对于ecu34也只供给较小的电力。因此,在车辆3的状态处于第一休眠状态(a31)时,与车辆3的受电相关的设备的消耗电力较小。不过,即使在车辆3的状态处于第一休眠状态(a31)时,也向车辆侧第一通信装置71供给电力。因此,车辆侧第一通信装置71能够从服务器91接收通知向任一地上供电装置2的识别信息列表登记了车辆3的车辆识别信息的列表登记通知。
237.另外,在第一休眠状态(a31)下,受电装置5与蓄电池32之间的继电器38被连接。因此,受电装置5和蓄电池32被连接,当受电装置5受电时,电力向蓄电池32供给。
238.在车辆3的状态处于第一休眠状态(a31)时,在车辆侧第一通信装置71接收到通知向任一地上供电装置2的识别信息列表登记了车辆3的车辆识别信息的列表登记通知且后述的中止条件及切断条件不成立的情况(c31)下,开始进行向与车辆3的从地上供电装置2的受电相关的设备的电力供给,这些设备启动并且进行这些设备的自我诊断(b32)。具体而言,向ecu34供给足以供ecu34完全工作的电力,并且向车辆侧第二通信装置72、磁场检测器66、车辆侧传感器37、物体传感器39及生物传感器40等供给电力。另外,在ecu34中执行自我
诊断程序,进行ecu34、车辆侧第二通信装置72、磁场检测器66、车辆侧传感器37、物体传感器39及生物传感器40等的自我诊断。
239.当这样的设备的启动及自我诊断完成后,车辆3的状态成为受电激活状态(a33)或受电激活、信号发送状态(a34。图11中的步骤s63中的状态)。在车辆3的状态处于受电激活状态(a33)或受电激活、信号发送状态(a34)时,向ecu34及车辆侧传感器37等供给充分的电力。
240.因此,在车辆3的状态处于受电激活状态(a33)或受电激活、信号发送状态(a34)时,当车辆3的受电侧谐振电路51接近地上供电装置2的送电侧谐振电路43而位于送电侧谐振电路43上时,在送电侧谐振电路43与受电侧谐振电路51之间产生强力的磁场谐振耦合,从地上供电装置2接受较大的电力。另一方面,在车辆3的状态处于受电激活状态(a33)或受电激活、信号发送状态(a34)时,当从在送电侧谐振电路43与受电侧谐振电路51之间产生了强力的磁场谐振耦合的状态起车辆3移动而受电侧谐振电路51从送电侧谐振电路43离开时,磁场谐振耦合被解除而从地上供电装置2向车辆3的供电结束。
241.另外,在车辆3的状态处于受电激活状态(a33)时,不向车辆侧第二通信装置72、磁场检测器66、物体传感器39及生物传感器40供给电力。因此,车辆侧第二通信装置72无法发送包含车辆3的车辆识别信息的信号。另外,磁场检测器66无法检测由交流电力产生电路64产生的横向偏移检测用的交流磁场。此外,物体传感器39及生物传感器40无法检测道路上的物体及生物。另一方面,在车辆3的状态处于受电激活、信号发送状态(a34)时,向车辆侧第二通信装置72、磁场检测器66、物体传感器39及生物传感器40供给电力。因此,车辆侧第二通信装置72发送包含车辆3的车辆识别信息的信号,磁场检测器66检测横向偏移检测用的交流磁场。因此,此时,当车辆3在地上供电装置2的附近行驶时,从车辆侧第二通信装置72向地上侧第二通信装置82发送包含车辆识别信息的信号。除此以外,此时,物体传感器39及生物传感器40检测道路上的物体及生物。
242.另外,在车辆3的状态处于受电激活状态(a33)时,因为不向车辆侧第二通信装置72、磁场检测器66、物体传感器39及生物传感器40供给电力,所以车辆3的消耗电力不那么大。另一方面,在车辆3的状态处于受电激活、信号发送状态(a34)时,因为向车辆侧第二通信装置72、磁场检测器66、物体传感器39及生物传感器40供给电力,所以消耗电力比受电激活状态(a33)大。
243.在车辆3的状态处于受电激活状态(a33)时,在发送停止条件全部不再成立的情况(c33)下,车辆3的状态切换为受电激活、信号发送状态(a34)。另一方面,在车辆3的状态处于受电激活、信号发送状态(a34)时,在发送停止条件成立了的情况(c34)下,车辆3的状态切换为受电激活状态(a33)。
244.在此,发送停止条件是需要暂时停止从车辆侧第二通信装置72的信号的发送的条件。通过暂时停止从车辆侧第二通信装置72的信号的发送,不再向地上侧第二通信装置82发送包含车辆识别信息的信号,由此,不再进行从地上供电装置2的送电。以下,列举发送停止条件的具体的例子。可以使用以下列举的全部发送停止条件,也可以不使用一部分的发送停止条件。在本实施方式中,在以下的发送停止条件中的任一个成立了的情况下,将车辆3的状态设定为受电激活状态(a33),在全都不成立的情况下,将车辆3的状态设定为受电激活、信号发送状态(a34)。
245.第一个发送停止条件是车辆3正在实施使较大的电力向蓄电池32流入的其他处理。在正在以除了非接触电力传输以外的方法进行蓄电池32的急速的充电的情况下,难以将基于非接触电力传输的电力向蓄电池32同时供给,因此为了暂时停止从地上供电装置2的送电而暂时停止信号发送。作为上述其他处理,例如,在车辆3是也由内燃机驱动的混合动力车辆的情况下,可举出内燃机的起动或停止。该其他处理例如根据设置于车辆3的车辆侧传感器37的输出或从ecu34向内燃机等的控制指令等而检测。
246.第二个发送停止条件是车辆3为紧急制动中。在车辆3为紧急制动中的情况下,通过再生电力而进行蓄电池32的充电,因此不容易将基于非接触电力传输的电力向蓄电池32同时高效地供给,因此为了暂时停止从地上供电装置2的送电而暂时停止信号发送。车辆3是否为紧急制动中例如基于车辆3的致动器踏板的踩踏量等而检测。
247.第三个发送停止条件是车辆3为车道变更中。在车辆3为车道变更中的情况下,即使车辆3正在地上供电装置2附近行驶,送电侧谐振电路43与受电侧谐振电路51的横向偏移也较大,因此为了暂时停止从地上供电装置2的送电而暂时停止信号发送。车辆3为车道变更中例如基于由设置于车辆3的前方相机等(未图示)拍摄到的图像等而检测。
248.第四个发送停止条件是车辆3接近左右的区划线或者从左右的区划线超出。在该情况下也是,即使车辆3正在地上供电装置2附近行驶,送电侧谐振电路43与受电侧谐振电路51的横向偏移也较大,因此为了暂时停止从地上供电装置2的送电而暂时停止信号发送。车辆3是否接近左右的区划线或者从区划线超出例如基于由设置于车辆3的前方相机等(未图示)拍摄到的图像等而检测。
249.第五个发送停止条件是由横向偏移检测装置在送电侧谐振电路43与受电侧谐振电路51之间检测到横向偏移。如上所述,在产生了横向偏移的情况下,供电效率下降,因此,在检测到横向偏移时,为了暂时停止从地上供电装置2的送电而暂时停止信号发送。因此,在本实施方式中,在检测到存在受电装置5相对于送电装置4的相对位置的偏移时,控制车辆侧第二通信装置72以不从地上供电装置2进行送电。因此,在本实施方式中,能够将由车辆3得到的横向偏移的检测结果实质上向地上供电装置2传递,其结果是,从地上供电装置2的送电停止。
250.第六个发送停止条件是由异物检测装置在车辆3的前方或下方的道路上检测到异物。如上所述,在设置有送电装置4的道路上存在异物的情况下,供电效率下降,因此,在检测到异物时,为了暂时停止从地上供电装置2的送电而暂时停止信号发送。因此,在本实施方式中,在检测到设置有送电装置4的道路上的异物时,控制车辆侧第二通信装置72以不从地上供电装置2进行送电。因此,在本实施方式中,能够将由车辆3得到的异物的检测结果实质上向地上供电装置2传递,其结果是,从地上供电装置2的送电停止。
251.这样,根据第五个及第六个发送停止条件,当检测到横向偏移或异物时,成为地上供电装置2中的送电的准备的契机的包含车辆识别信息的信号不再从车辆侧第二通信装置72发送。其结果是,地上供电装置2中的送电的准备不再进行(即,不进行图13中的c14的动作而地上供电装置2仍为接收待机状态)。因此,在本实施方式中,横向偏移或异物的检测结果以足以使从地上供电装置2的送电不进行的速度迅速向地上供电装置2传递。另外,在本实施方式中,由于表示检测到横向偏移或异物的信号并非在车辆侧第二通信装置72与地上侧第二通信装置82之间通过短程通信而发送,所以也可抑制应该通过短程通信而传递的信
息量不必要地增大。
252.第七个发送停止条件是车辆3的车辆侧第一通信装置71与服务器91之间的通信中断了不足一定时间。在此,车辆侧第一通信装置71定期地与服务器91进行通信,例如发送供电中的车辆3的车辆信息(尤其是,要求供电电力等)。并且,当不再能够发送车辆3的车辆信息时,不再能够适当地控制供电。因此,在通信中断时,为了暂时停止从地上供电装置2的送电而暂时停止信号发送。
253.在车辆3的状态处于受电激活状态(a33)或受电激活、信号发送状态(a34)时,当车辆3的车辆侧第一通信装置71不再接收列表登记通知时,即,当在所有的地上供电装置2的识别信息列表中都不再登记有车辆3的车辆识别信息(c35)时,车辆3的状态恢复为第一休眠状态(a31)。
254.另一方面,在车辆3的状态处于受电激活状态(a33)或受电激活、信号发送状态(a34)时后述的中止条件成立且受电装置5未从地上供电装置2的送电装置4受电的情况或后述的切断条件成立的情况(c36)下,从车辆侧第一通信装置71向服务器91、进而向对应的地上供电装置2发送识别信息擦除要求及送电停止要求。
255.识别信息擦除要求是该车辆3的车辆识别信息从对应的地上供电装置2的识别信息列表的擦除的要求。成为擦除要求的对象的地上供电装置2可以是该车辆3的车辆识别信息登记于识别信息列表的全部地上供电装置2,也可以仅是位于该车辆3的当前位置附近的地上供电装置2。接收到识别信息擦除要求的地上供电装置2从存储于该地上供电装置2的存储器222的识别信息列表擦除该车辆3的车辆识别信息。
256.送电停止要求是停止从对应的地上供电装置2向车辆3的供电的要求。成为停止要求的对象的地上供电装置2是位于该车辆3的当前位置附近的地上供电装置2。接收到送电停止要求的地上供电装置2在正在进行向该车辆3的送电时,停止送电。
257.通过这样对地上供电装置2发送识别信息擦除要求及送电停止要求,无需将地上供电装置2的状态不必要地从休眠状态(a11)切换为接收待机状态(a13)、送电激活状态(a16),能够抑制地上供电装置2的消耗电力。
258.当从车辆侧第一通信装置71发送了识别信息擦除要求及送电停止要求(b13)时,在切断条件成立了的情况(c37)下,车辆3的状态切换为第二休眠状态(a35)。另外,在车辆的状态处于第一休眠状态(a31)时切断条件成立了的情况(c38)下,车辆3的状态也切换为第二休眠状态(a35)。
259.在车辆3的状态处于第二休眠状态(a35)时,与处于第一休眠状态(a31)时相同地向车辆3仅供给待机电力。然而,在车辆3的状态处于第二休眠状态(a35)时,继电器38被切断。因此,受电装置5与蓄电池32之间的连接被切断,受电装置5实质上无法受电。
260.在车辆3的状态处于第二休眠状态(a35)时切断条件不再成立的情况(c39)下,车辆3的状态切换为第一休眠状态(a31)。
261.在此,切断条件是除了中止从地上供电装置2向车辆3的受电以外还需要切断受电装置5和蓄电池32的条件。以下,列举切断条件的具体的例子。可以使用以下列举的全部切断条件,也可以不使用一部分的切断条件。在本实施方式中,在以下的切断条件中的任一个成立了的情况下,车辆3的状态设定为第二休眠状态(a35)。
262.第一个切断条件是蓄电池32的充电率soc为充电率界限值以上。充电率界限值是
在蓄电池32的构造上难以进一步向蓄电池32进行充电的预先确定的值,例如是95%以上。当蓄电池32的充电率soc为充电率界限值以上时,目前无法进行向蓄电池32的充电,因此受电装置5与蓄电池32的连接被切断。蓄电池32的充电率soc基于由车辆侧传感器37(电流传感器)检测到的蓄电池32的充电电流值及放电电流值而在ecu34中算出。
263.第二个切断条件是蓄电池32的温度为蓄电池界限温度以上。界限温度是当蓄电池32的温度成为蓄电池界限温度以上时蓄电池32的劣化进展那样的温度。当蓄电池32的温度成为了蓄电池界限温度以上时,目前无法进行会导致蓄电池32的温度的上升的向蓄电池32的充电,因此受电装置5与蓄电池32之间的连接被切断。蓄电池32的温度由车辆侧传感器37(蓄电池温度传感器)检测。
264.第三个切断条件是车辆3的受电装置5的温度,尤其是受电侧谐振电路51、受电侧整流电路54的温度为预定的受电装置界限温度以上。受电装置界限温度是当受电装置5的温度进一步变高时受电装置5有可能产生异常的温度。当受电装置5的温度的温度成为受电装置界限温度以上时,目前无法进行会导致受电装置5的温度的上升的受电装置5的使用,因此受电装置5与蓄电池32的连接被切断。受电装置5的温度由车辆侧传感器37(受电装置温度传感器)检测。
265.第四个切断条件是向受电装置5流动的电流为电流界限值以上或向受电装置5施加的电压为电压界限值以上。当向受电装置5流动的电流或向受电装置5施加的电压过剩地变大时,受电装置5有可能产生异常,因此受电装置5与蓄电池32之间的连接被切断。向受电装置5流动的电流及向受电装置5施加的电压由车辆侧传感器37(电流传感器、电压传感器)检测。
266.第五个切断条件是车辆3的车辆侧第一通信装置71与服务器91的通信中断了一定时间以上。如上所述,车辆侧第一通信装置71定期地与服务器91进行通信,例如发送供电中的车辆3的车辆信息(尤其是,要求供电电力等)。并且,当不再能够发送车辆3的车辆信息时,不再能够适当地控制供电。尤其是,在该通信中断了一定时间以上时,并非产生了暂时的通信障碍,因此受电装置5与蓄电池32的连接被切断。
267.另外,切断条件为成立频度比后述的中止条件低的条件。在此,当施加较高的电压的继电器38的连接及切断频繁反复时,会成为继电器38中的异常产生的要因。在本实施方式中,通过将进行继电器38的切断的切断条件设为成立频度较低的条件,可抑制继电器38中的异常的产生。
268.另一方面,当从车辆侧第一通信装置71发送了识别信息擦除要求及送电停止要求时(b13),在中止条件成立了的情况(c40)下,车辆3的状态切换为第二休眠状态(a35)。
269.在此,中止条件是需要中止从地上供电装置2向车辆3的受电的条件。以下,列举中止条件的具体的例子。可以使用以下列举的全部中止条件,也可以不使用一部分的中止条件。在本实施方式中,在以下的中止条件中的任一个成立的情况下,将车辆3的状态设定为第一休眠状态(a31)。
270.第一个中止条件是蓄电池32的充电率soc为充电率基准值以上且低于充电率界限值。充电率基准值是低于上述的充电率界限值的预先确定的值,例如为80%以上。当蓄电池32的充电率soc为充电率基准值以上时,基本上无需进行向蓄电池32的充电,因此从地上供电装置2向车辆3的受电被中止。
271.第二个中止条件是蓄电池32的温度为蓄电池基准温度以上且低于蓄电池界限温度。蓄电池基准温度是低于上述的蓄电池界限温度的预先确定的温度。当蓄电池32的温度为蓄电池基准温度以上时,需要抑制向蓄电池32的充电以避免蓄电池32的温度到达蓄电池界限温度,因此从地上供电装置2向车辆3的受电被中止。
272.第三个中止条件是车辆3的受电装置5的温度,尤其是受电侧谐振电路51或受电侧整流电路54的温度为预定的受电装置基准温度以上且低于受电装置界限温度。受电装置基准温度是低于上述的受电装置界限的预先确定的温度。当受电装置5的温度为受电装置基准温度以上时,需要抑制受电装置5的使用以避免受电装置5的温度到达受电装置基准温度,因此从地上供电装置2向车辆3的受电被中止。
273.第四个中止条件是蓄电池32的容许充电电力为预定的充电电力基准值以上。在蓄电池32的容许充电电力较小的情况下,即使受电装置5从送电装置4受电,也有可能无法将该电力适当地向蓄电池供给,因此从地上供电装置2向车辆3的受电被中止。蓄电池32的容许充电电力基于车辆侧传感器37(蓄电池温度传感器、蓄电池电流传感器等)的输出而算出。
274.第五个中止条件是车辆3的速度为预先确定的中止基准速度以上。档车辆3的速度为中止基准速度以上时,供电效率下降,因此从地上供电装置2向车辆3的受电被中止。中止基准速度也可以与上述的第五个中断条件中的中断基准速度相同。车辆3的速度由车辆侧传感器37(速度传感器)检测。
275.第六个中止条件是基于从地上供电装置2受电的车辆3的受电电力而算出的对于车辆3的使用者的收费金额成为了预定的上限收费金额以上。对于使用者的收费金额基于从地上供电装置2的受电中的受电电力的推移和此时的每单位电力的费用而由ecu34算出。另外,上限收费金额可以是预先确定的一定值,也可以是由车辆3的使用者设定的值。
276.第七个中止条件是存在来自使用者的中止要求的情况。来自使用者的中止要求例如从设置于车辆3的用于输入行驶中供电的需要与否的开关输出。
277.车辆3的状态及动作的控制由ecu34进行。因此,例如,在车辆3的状态处于第二休眠状态(a35)时,ecu34基于车辆侧传感器37的输出等来判定切断条件是否成立。并且,ecu34在判定为切断条件不成立的情况下,以使受电装置5与蓄电池32连接的方式控制继电器38。
278.接着,参照图15来对受电结束处理进行说明。图15是示出与受电结束处理的执行相关的作业的流程的流程图。图示的处理每隔一定的时间间隔地进行。
279.如图15所示,首先,ecu34取得当前位置信息及地图信息(步骤s101)。ecu34从gnss接收机35取得车辆3的当前位置信息。除此以外,ecu34从存储装置36取得地图信息。尤其是,在本实施方式中,ecu34取得包含车辆3的当前位置的周围的地上供电装置2的设置位置信息的地图信息。
280.接着,ecu34基于在步骤s101中取得的当前位置信息及地上供电装置2的设置位置信息来判定车辆3是否通过了任意的地上供电装置2的上方(步骤s102)。
281.在步骤s102中判定为车辆3通过了任意的地上供电装置2的上方的情况下,ecu34进行受电结束处理(步骤s103)。在受电结束处理中,从车辆侧第一通信装置71向服务器91发送受电结束信息。受电结束信息包含与从地上供电装置2的受电相关的信息。受电结束信
息中包含的各种参数的值基于车辆侧传感器37的输出等而算出。另一方面,在步骤s102中判定为车辆3未通过任意的地上供电装置2的上方的情况下,跳过步骤s103。
282.第二实施方式
283.接着,参照图16来对第二实施方式的非接触供电系统1进行说明。第二实施方式的非接触供电系统1的结构及控制基本上与第一实施方式的非接触供电系统1的结构及控制相同。以下,以与第一实施方式的非接触供电系统1不同的部分为中心进行说明。
284.在上述第一实施方式的非接触供电系统1中,在由车辆3的横向偏移检测装置检测到横向偏移的情况或由车辆3的异物检测装置检测到异物的情况下,停止从车辆侧第二通信装置72的信号的发送。与此相对,在本第二实施方式的非接触供电系统1中,在检测到横向偏移或异物的情况下,不停止信号发送,从车辆侧第二通信装置72发送除了车辆识别信息以外还包含从地上供电装置2的送电的停止请求的信号。并且,地上供电装置2当接收到包括送电的停止请求的信号时,停止送电。因此,在本实施方式中也是,在检测到横向偏移或异物的情况下,控制车辆侧第二通信装置72以不从地上供电装置2进行送电。
285.图16是概略性地示出车辆3的状态处于图14的受电激活、信号发送状态时的车辆3的状态的转变的图。在本实施方式中,车辆3的状态及动作基本上如图14所示那样转变。然而,在本实施方式中,在发送停止条件不成立而车辆3的状态处于受电激活、信号发送状态a34时,车辆3的状态在受电激活、第一信号发送状态(a341)与受电激活、第二信号发送状态a342之间转变。
286.在车辆3的状态处于受电激活、第一信号发送状态(a341)或受电激活、第二信号发送状态(a342)时,向车辆侧第二通信装置72及磁场检测器66供给电力。因此,车辆侧第二通信装置72发送信号,磁场检测器66检测横向偏移检测用的交流磁场。另外,物体传感器39及生物传感器40检测道路上的物体及生物。尤其是,在车辆3的状态处于受电激活、第一信号发送状态(a341)时,车辆侧第二通信装置72发送包含车辆识别信息但不包含送电停止请求的信号。另一方面,在车辆3的状态处于受电激活、第二信号发送状态(a342)时,车辆侧第二通信装置72发送包含车辆识别信息及送电停止请求的信号。送电停止请求例如是请求从地上供电装置2的送电的停止的标志,在地上供电装置2中,在接收到该送电停止请求的期间,至少停止向送电侧谐振电路43的电力的供给,由此,停止从地上供电装置2的送电。
287.在车辆3的状态处于受电激活、第一信号发送状态(a341)时标志发送条件成立了的情况(c51)下,车辆3的状态切换为受电激活、第二信号发送状态(a342)。另一方面,在车辆3的状态处于受电激活、第二信号发送状态(a342)时标志发送条件全部不再成立的情况(c52)下,车辆3的状态切换为受电激活、第一信号发送状态(a341)。
288.在此,标志发送条件是需要暂停停止从地上供电装置2的送电且需要向地上供电装置2发送送电停止请求的条件。以下,列举标志发送条件的具体的例子。可以使用以下列举的全部标志发送条件,也可以不使用一部分的标志发送条件。在本实施方式中,在以下的标志发送条件中的任一个成立的情况下将车辆3的状态设定为受电激活、第二信号发送状态(a342),在都不成立的情况下将车辆3的状态设定为受电激活、第一信号发送状态(a341)。
289.第一个标志发送条件是由横向偏移检测装置在送电侧谐振电路43与受电侧谐振电路51之间检测到横向偏移。如上所述,在产生了横向偏移的情况下,供电效率下降,因此,
在检测到横向偏移时,为了暂时停止从地上供电装置2的送电而发送包含送电停止请求的信号。
290.第二个标志发送条件是由异物检测装置在车辆3的前方或下方的道路上检测到异物。如上所述,在设置有送电装置4的道路上存在异物的情况下,供电效率下降,因此,在检测到异物时,为了暂时停止从地上供电装置2的送电而发送包含送电停止请求的信号。
291.另外,在本实施方式中,即使在由横向偏移检测装置检测到横向偏移的情况下,另外,即使在由异物检测装置检测到异物的情况下,从车辆侧第二通信装置72的信号发送都不被停止而继续(即,在本实施方式中,不使用上述的第五个发送停止条件及第六个发送停止条件)。因此,即使在这样的情况下,车辆3的状态也不从受电激活、信号发送状态(a34)向受电激活状态(a33)切换。
292.另外,在本实施方式中,对需要暂时中断从地上供电装置2向车辆3的送电的中断条件追加第六个中断条件。第六个中断条件是地上侧第二通信装置82从车辆侧第二通信装置72接收到包含送电停止请求的信号。因此,当地上侧第二通信装置82接收到包含送电停止请求的信号时,将地上供电装置2的状态设定为待机状态。
293.另外,在本实施方式中,将地上侧第二通信装置82从车辆侧第二通信装置72接收到包含送电停止请求的信号设为中断条件,但也可以设为结束条件。不管怎样,当在车辆3中检测到横向偏移或异物而地上侧第二通信装置82接收到包含送电停止请求的信号时,停止从地上供电装置2的送电。
294.根据本实施方式,在车辆3在地上供电装置2上行驶的期间基于横向偏移检测装置的横向偏移的检测状态发生了变化或者基于异物检测装置的异物的检测状态发生了变化的情况下,能够根据该变化而迅速切换是否从地上供电装置2进行送电。
295.另外,在车辆3在地上供电装置2上行驶的期间横向偏移或异物的检测状态变化在车辆3的速度较慢时更容易发生。因此,例如,也可以在车辆3的速度为预先确定的基准速度以上的情况下,如上述第一实施方式那样在检测到横向偏移或异物时停止从车辆侧第二通信装置72的信号发送,在车辆3的速度小于基准速度的情况下,如上述第二实施方式那样在检测到横向偏移或异物时从车辆侧第二通信装置72发送包含送电停止请求的信号。
296.不管怎样,在第一实施方式及第二实施方式的非接触供电系统1中,在检测到相对位置的偏移或道路上的异物时,控制车辆侧第二通信装置72以不从地上供电装置2进行送电。通过这样控制使用了短程通信的车辆侧第二通信装置72,在这些实施方式的非接触供电系统1中,能够将相对位置的偏移或道路上的异物的检测结果迅速传递到地上供电装置2。
297.以上,说明了本公开的优选的实施方式,但本公开不限定于这些实施方式,能够在权利要求书的记载内实施各种各样的修正及变更。
298.附图标记说明
[0299]1ꢀꢀ
非接触供电系统
[0300]2ꢀꢀ
地上供电装置
[0301]3ꢀꢀ
车辆
[0302]4ꢀꢀ
送电装置
[0303]5ꢀꢀ
受电装置
[0304]
22
ꢀꢀ
控制器
[0305]
34
ꢀꢀ
ecu
[0306]
71
ꢀꢀ
车辆侧第一通信装置
[0307]
72
ꢀꢀ
车辆侧第二通信装置
[0308]
81
ꢀꢀ
地上侧第一通信装置
[0309]
82
ꢀꢀ
地上侧第二通信装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1