一种车载设备控制方法、装置、设备及存储介质与流程
本发明涉及车辆,具体涉及一种车载设备控制方法、装置、设备及存储介质。
背景技术:
1、使用车载激光雷达可以提高高级别智能辅助驾驶系统对周围环境的感知能力。激光雷达有体积大、成本高、镜面易损的特点,因此有些厂商会使用隐藏机构,这样在关闭状态下,激光雷达会隐藏在汽车车体内部,在开启状态下,激光雷达会通过机械组展开,到达指定工作位置。
2、图1是现有技术中一种激光雷达隐藏机构在车辆上的位置示意图,图2是现有技术中一种激光雷达隐藏机构的结构示意图,请参照图1和图2,激光雷达隐藏机构,包括盖板10、固定支架20、升降结构30、清洗结构40、弹出结构50、激光雷达60、控制器70,所述盖板10位于车身翼子板80上,并与所述翼子板80上的开口大小吻合,所述固定支架20、升降结构30、清洗结构40、弹出结构50、激光雷达60、控制器70均位于所述翼子板80的内部,所述升降结构30设于所述固定支架20上且与所述盖板10连接,并能够在所述控制器70的控制下驱动所述盖板10上下运动,所述激光雷达60设于所述弹出结构50上,所述弹出结构50设于所述固定支架20上,且能够在所述控制器70的控制下相对所述固定支架20向外运动,将所述激光雷达60推出所述翼子板80的内部,所述清洗结构40与所述激光雷达60一起设于所述弹出结构50上,所述控制器70位于所述激光雷达60的上方且通过第一线束与自动驾驶或高级辅助驾驶域控制器连接。
3、在寒冷地区,由于水汽在盖板附近形成冷凝,上述盖板10与车身翼子板衔接处或激光雷达60与支撑装置20衔接处可能会落霜/结冰,严重时会导致盖板运动机构卡住,在高级别辅助驾驶功能运行需要展开激光雷达时,导致激光雷达无法正常展开,进而使高级别辅助驾驶系统失效,严重时会导致电机30/50过载运转后损坏。
4、图3是现有技术中另一种激光雷达隐藏机构在车辆上的位置示意图,图4是现有技术中另一种激光雷达隐藏机构的结构示意图,请参照图3和图4,激光雷达隐藏机构位于车辆顶盖前后两处10,激光雷达40、升降装置20、控制器50均位于外壳体10和下盖板60之间,激光雷达40位于升降装置20上方,升降装置20能够在所述控制器50的控制下伸长或缩短,带动激光雷达40伸出至汽车外部或缩回至汽车内部,控制器50通过第一线束与自动驾驶域控制器或高级辅助驾驶域控制器连接。
5、在寒冷地区,由于水汽在盖板附近形成冷凝,上述盖板11与车身顶盖衔接处可能会落霜/结冰,严重时会导致盖板运动机构卡住,在高级别辅助驾驶功能运行需要展开激光雷达时,导致激光雷达无法正常展开,进而使高级别辅助驾驶系统失效,严重时会导致电机21过载运转后损坏。
6、因此,有必要针对低温环境导致隐藏机构结冰的现象提供一种解决方案以保证隐藏式激光雷达机构在低温时也能满足高级别辅助驾驶需求。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明第一方面提出一种车载设备控制方法,包括:
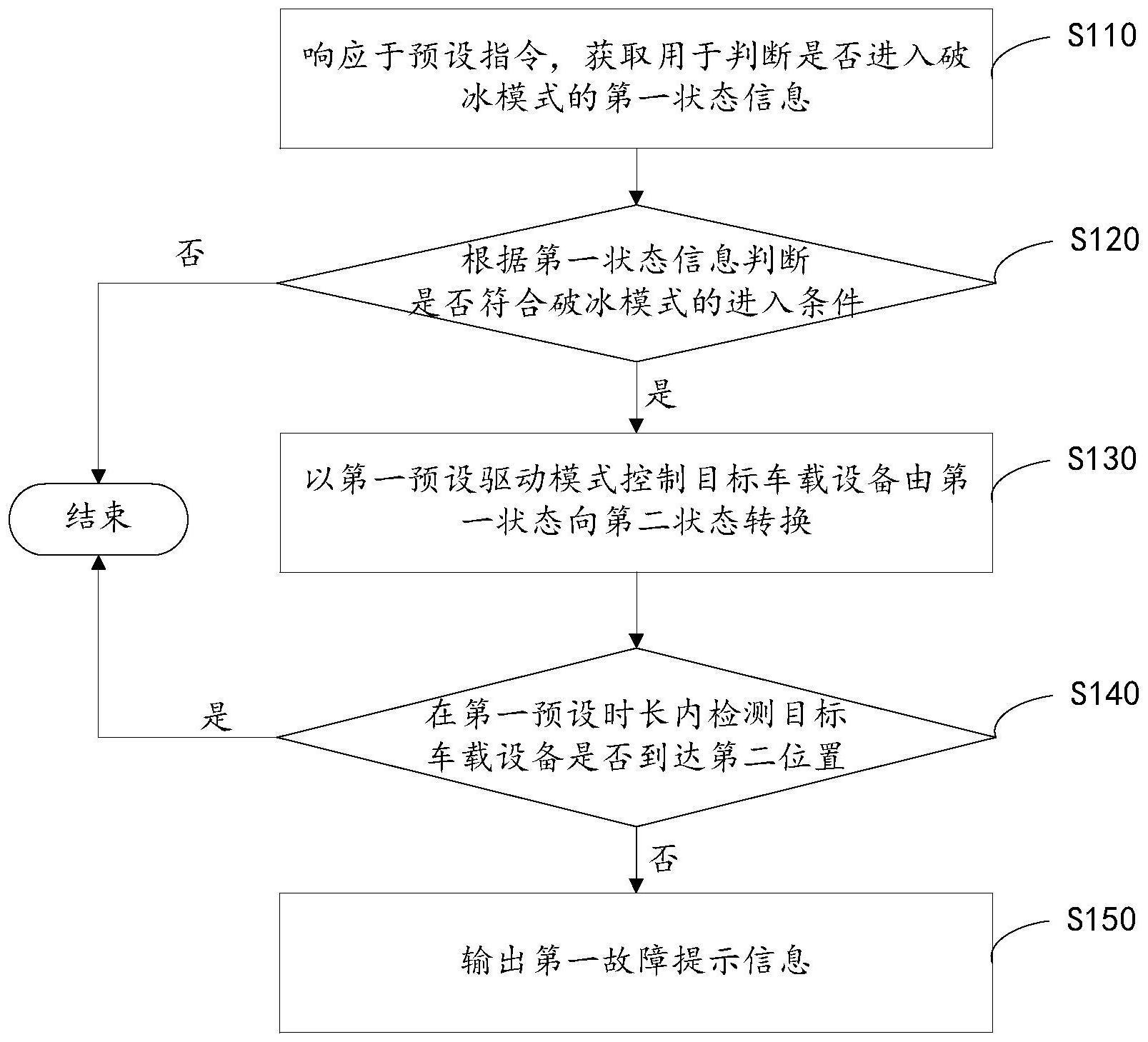
2、响应于预设指令,获取用于判断是否进入破冰模式的第一状态信息;其中,所述第一状态信息包括目标车载设备的自检结果,所述目标车载设备具有隐藏于车身内第一位置的第一状态和暴露于车身外第二位置的第二状态;
3、根据所述第一状态信息判断是否符合破冰模式的进入条件;
4、在符合所述破冰模式的进入条件时,以第一预设驱动模式控制所述目标车载设备由所述第一状态向所述第二状态转换;
5、在第一预设时长内检测所述目标车载设备是否到达所述第二位置;
6、若未到达所述第二位置,输出第一故障提示信息。
7、进一步地,所述在第一预设时长内检测所述目标车载设备是否到达所述第二位置之后,还包括:
8、若未到达所述第二位置,以第二预设驱动模式控制所述目标车载设备由所述第一状态向所述第二状态转换;其中,所述第二预设驱动模式与所述第一预设驱动模式相比具有更大的驱动力和/或驱动频次;
9、在第二预设时长内检测所述目标车载设备是否到达所述第二位置。
10、进一步地,所述以第一预设驱动模式控制所述目标车载设备由所述第一状态向所述第二状态转换,包括:
11、以第一占空比参数控制所述目标车载设备的电机动作;其中,所述电机用于驱动所述目标车载设备由所述第一状态向所述第二状态转换,所述第一占空比参数包括第一占空比和/或第一占空比变化率。
12、进一步地,所述以第二预设驱动模式控制所述目标车载设备由所述第一状态向所述第二状态转换,包括:
13、以第二占空比参数控制所述目标车载设备的电机动作;其中,所述电机用于驱动所述目标车载设备由所述第一状态向所述第二状态转换,所述第二占空比参数包括第二占空比和/或第二占空比变化率,所述第二占空比大于所述第一占空比,所述第二占空比变化率大于所述第一占空比变化率。
14、进一步地,所述根据所述第一状态信息判断是否符合破冰模式的进入条件,包括:
15、判断所述目标车载设备的自检结果是否为自检无故障;
16、在所述自检结果为自检无障碍时,转向所述以第一预设驱动模式控制所述目标车载设备由所述第一状态向所述第二状态转换的步骤;
17、在所述自检结果为自检障碍时,输出第二故障提示信息。
18、进一步地,所述第一状态信息还包括自车当前位置对应的第一环境温度和第一环境湿度、自车感知设备采集的第二环境温度与第二环境湿度;所述判断所述目标车载设备的自检结果是否为自检无故障之后,包括:
19、在所述自检结果为自检无障碍时,计算所述第一环境温度与所述第二环境温度之间的温度差值,计算所述第一环境湿度和所述第二环境湿度之间的湿度差值;
20、判断所述温度差值和所述湿度差值是否满足第一预设条件;其中,所述第一预设条件包括所述温度差值在第一预设范围内且所述湿度差值在第二预设范围内;
21、在满足所述第一预设条件时,判断所述第二环境温度和所述第二环境湿度是否满足第二预设条件;其中,所述第二预设条件包括所述第二环境温度低于预设温度阈值且所述第二环境湿度高于预设湿度阈值;
22、在满足所述第二预设条件时,转向所述以第一预设驱动模式控制所述目标车载设备由所述第一状态向所述第二状态转换的步骤。
23、进一步地,所述根据所述第一状态信息判断是否符合破冰模式的进入条件之前,包括:
24、获取接收到所述预设指令的时刻与所述目标车载设备上一次到达所述第二位置的时刻之间的间隔时长;
25、判断所述间隔时长是否大于第二预设时长;
26、若是,转向所述根据所述第一状态信息判断是否符合破冰模式的进入条件的步骤或者转向所述获取用于判断是否进入破冰模式的第一状态信息;
27、若否,结束流程。
28、本发明第二方面提出一种车载设备控制装置,包括:
29、状态获取模块,用于响应于预设指令,获取用于判断是否进入破冰模式的第一状态信息;其中,所述第一状态信息包括目标车载设备的自检结果,所述目标车载设备具有隐藏于车身内第一位置的第一状态和暴露于车身外第二位置的第二状态;
30、第一判断模块,用于根据所述第一状态信息判断是否符合破冰模式的进入条件;若符合,转向第一破冰模块;
31、所述第一破冰模块,用于以第一预设驱动模式控制所述目标车载设备由所述第一状态向所述第二状态转换;
32、第一位置判断模块,用于在第一预设时长内检测所述目标车载设备是否到达所述第二位置;若未到达所述第二位置,转向信息输出模块;
33、所述信息输出模块,用于输出故障提示信息。
34、本发明第三方面提出一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令或至少一段程序,所述至少一条指令或所述至少一段程序由所述处理器加载并执行以实现如本发明第一方面提出的车载设备控制方法。
35、本发明第四方面提出一种计算机可读存储介质,所述存储介质中存储有至少一条指令或至少一段程序,所述至少一条指令或所述至少一段程序由处理器加载并执行以实现如本发明第一方面提出的车载设备控制方法。
36、实施本发明实施例,具有如下有益效果:
37、本发明实施例提供的一种车载设备控制方法、装置、设备及存储介质,用于控制具有隐藏机构的车载设备,具体是在驱动机构卡滞时识别出当前状态是否具备展开该隐藏式车载设备的条件,在具备展开条件时实时有效进行破冰,保证隐藏式车载设备可以正常展开,确保高级别辅助驾驶功能正常激活、开启,还避免了驱动机构的潜在损坏风险,即使无法破冰成功,也能起到提前警示驾驶员的作用,避免驾驶员在车辆行驶过程中发现功能失效,提高了基于该隐藏式车载设备的整套辅助驾驶系统在使用过程中的稳定性和鲁棒性。
38、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!