一种矿用自卸车货箱位置测量装置及方法与流程
1.本发明涉及一种矿用自卸车货箱位置测量装置及方法,属于工程机械技术领域。
背景技术:
2.矿用自卸车作为一种运载车辆,广泛应用于大型露天矿山、水利工程中,地形复杂,工况恶劣。随着技术的进步,智能控制技术在矿用自卸车上的应用越来越广泛。在矿用自卸车的智能控制上,精确的货箱位置测量是必不可以少的。矿用自卸车长期的重载工况,也使货箱易发生侧倾。为了更好的实现货箱的智能控制和驾驶安全,需要对货箱的位置进行测量。
3.目前的货箱位置测量方法主要是使用位置感应传感器。位置感应传感器仅能实现货箱下落到位和举升到位的检测,无法检测货箱举升和下落过程中货箱位置角度,无法满足智能化控制技术的需要。
技术实现要素:
4.针对上述现有技术存在的问题,本发明提供一种矿用自卸车货箱位置测量装置及方法,能精确测量货箱位置,并且在货箱位置异常时进行报警,满足智能控制和驾驶安全的需要。
5.为了实现上述目的,本发明采用的一种矿用自卸车货箱位置测量装置,包括:
6.位移传感器,所述位移传感器用于测量货箱左侧和右侧举升油缸伸缩量;
7.钥匙开关,所述钥匙开关用于实现装置的上电,使控制器工作;
8.声光报警器,所述声光报警器用于实现货箱异常侧倾报警;
9.显示器,所述显示器用于实时显示货箱举升角度和侧倾角度;
10.控制器,所述控制器分别与位移传感器ⅰ、位移传感器ⅱ、钥匙开关、声光报警器和显示器连接,控制器读取位移传感器ⅰ和位移传感器ⅱ数据,结合车身结构设计数据,计算货箱的举升角度和侧倾角度,通过can总线将数据发给显示器显示,并输出信号控制声光报警器对异常数据报警。
11.作为改进,所述位移传感器包括位移传感器ⅰ和位移传感器ⅱ,位移传感器ⅰ、位移传感器ⅱ分别安装在货箱左侧和右侧举升油缸内部。
12.作为改进,所述钥匙开关、声光报警器和显示器分别安装在驾驶室内,所述控制器安装在控制柜内。
13.另外,本发明还提供了一种所述矿用自卸车货箱位置测量装置的测量方法,包括以下步骤:
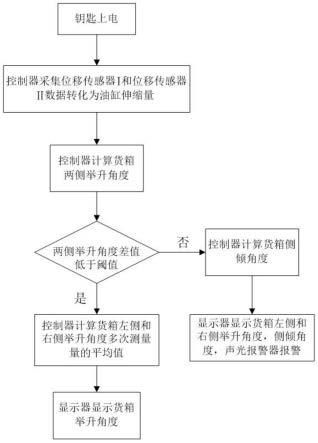
14.s1、钥匙上电;
15.s2、控制器采集位移传感器ⅰ和位移传感器ⅱ输出的电流数据,分别转化为货箱左侧和右侧举升油缸伸缩量;
16.s3、控制器计算得到货箱左侧举升角度和货箱右侧举升角度,并计算货箱左侧举
升角度和货箱右侧举升角度差值;
17.当控制器判断该差值有效,货箱举升角度取值为左侧举升角度和货箱右侧举升角度多次测量计算的平均值,此时显示器显示货箱举升角度;
18.当控制器判断该差值无效,控制器计算货箱的侧倾角度,此时显示器分别显示货箱左侧举升角度、货箱右侧举升角度以及货箱的侧倾角度,同时声光报警器进行报警。
19.作为改进,所述步骤s3中根据举升油缸的伸缩量和车辆结构设计数据,计算货箱举升角度:
[0020][0021]
式中:s1为举升油缸上铰接点和货箱与车架铰接点间距;s2为举升油缸下铰接点和货箱与车架铰接点间距;l(i)为位移传感器的电流值对应的举升油缸伸缩量函数;a为举升油缸上铰接点和货箱与车架铰接点连线与货箱底边夹角;b为举升油缸下铰接点和货箱与车架铰接点连线与车架上边夹角。
[0022]
作为改进,所述步骤s3中将控制器计算得到的货箱左侧举升角度θ
l
与货箱右侧举升角度θr进行比较,如果|θ
l-θk|≤θk,认为车辆举升功能正常,数据有效;如果|θ
l-θk|>θk,认为车辆举升功能异常,数据无效;
[0023]
式中:θk为允许的结构数据偏差。
[0024]
作为改进,当数据有效时,货箱举升角度θ取值为左侧举升角度θ
l
和右侧举升角度θr多次测量的平均值:
[0025][0026]
作为改进,当数据无效时,货箱侧倾角度计算公式如下:
[0027][0028]
式中:i
l
和ir为某一时刻位移传感器ⅰ和位移传感器ⅱ的电流数据;l(i
l
)和l(ir)为位移传感器电流值相对应的举升油缸伸缩量函数;d为货箱与左右举升油缸上铰接点距离的设计数据。
[0029]
与现有技术相比,本发明通过位移传感器采集货箱左侧和右侧举升油缸的伸缩量,结合自卸车结构设计数据,可以准确计算货箱的举升角度,在车辆举升功能异常时,可准确计算货箱的侧倾角度。本发明在满足经济性的前提下,提升了货箱位置的测量精度,有效满足了自卸车智能控制和驾驶安全的需要,实用性强。
附图说明
[0030]
图1为本发明的矿用自卸车货箱位置测量装置的原理图;
[0031]
图2为本发明的矿用自卸车货箱位置测量流程图;
[0032]
图3为举升角度测量模型。
具体实施方式
[0033]
为使本发明的目的、技术方案和优点更加清楚明了,下面对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。
[0034]
除非另有定义,本文所使用的所有的技术术语和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
[0035]
如图1所示,一种矿用自卸车货箱位置测量装置,包括位移传感器ⅰ、位移传感器ⅱ、控制器、钥匙开关、声光报警器、显示器等部件;
[0036]
所述位移传感器ⅰ和位移传感器ⅱ均为电流型磁致伸缩位移传感器,分别安装在货箱左侧和右侧举升油缸内部,可用来测量货箱左侧和右侧举升油缸伸缩量;
[0037]
所述钥匙开关安装在驾驶室内,可由驾驶员控制,实现测量装置的上电,使控制器工作;
[0038]
所述声光报警器安装在驾驶室内,用来实现货箱异常侧倾报警,提醒司机注意驾驶安全;
[0039]
所述显示器安装在驾驶室司机便于观察的位置,用来实时显示货箱举升角度和侧倾角度;
[0040]
所述控制器安装在控制柜内,控制器分别与位移传感器ⅰ、位移传感器ⅱ、钥匙开关、声光报警器和显示器连接,所述控制器用于读取位移传感器ⅰ和位移传感器ⅱ的电流数据,并将数据转化为货箱左侧和右侧举升油缸伸缩量,结合车身结构设计数据,计算货箱的举升角度和侧倾角度,然后通过can总线将数据发给显示器显示,并输出信号控制声光报警器对异常数据报警。
[0041]
另外,如图2、图3所示,本发明还提供了一所述矿用自卸车货箱位置测量装置的测量方法,包括以下步骤:
[0042]
s1、钥匙上电;
[0043]
s2、控制器采集位移传感器ⅰ和位移传感器ⅱ输出的电流数据,分别转化为货箱左侧和右侧举升油缸伸缩量;
[0044]
s3、控制器计算得到货箱左侧举升角度和货箱右侧举升角度,并计算货箱左侧举升角度和货箱右侧举升角度差值;
[0045]
当控制器判断该差值有效,货箱举升角度取值为左侧举升角度和货箱右侧举升角度多次测量计算的平均值,此时显示器显示货箱举升角度;
[0046]
当控制器判断该差值无效,控制器计算货箱的侧倾角度,此时显示器分别显示货箱左侧举升角度、货箱右侧举升角度以及货箱的侧倾角度,同时声光报警器进行报警。
[0047]
作为实施例的改进,所述步骤s3中根据举升油缸的伸缩量和车辆结构设计数据,计算货箱举升角度:
[0048][0049]
式中:s1为举升油缸上铰接点和货箱与车架铰接点间距;s2为举升油缸下铰接点和货箱与车架铰接点间距;l(i)为位移传感器的电流值对应的举升油缸伸缩量函数;a为举升
油缸上铰接点和货箱与车架铰接点连线与货箱底边夹角;b为举升油缸下铰接点和货箱与车架铰接点连线与车架上边夹角。
[0050]
作为实施例的改进,所述步骤s3中将控制器计算得到的货箱左侧举升角度θ
l
与货箱右侧举升角度θr进行比较,如果|θ
l-θk|≤θk,认为车辆举升功能正常,数据有效;如果|θ
l-θk|>θk,认为车辆举升功能异常,数据无效;
[0051]
式中:θk为允许的结构数据偏差。
[0052]
作为实施例的改进,当数据有效时,货箱举升角度θ取值为左侧举升角度θ
l
和右侧举升角度θr多次测量的平均值:
[0053][0054]
作为实施例的改进,当数据无效时,货箱侧倾角度计算公式如下:
[0055][0056]
式中:i
l
和ir为某一时刻位移传感器ⅰ和位移传感器ⅱ的电流数据;l(i
l
)和l(ir)为位移传感器电流值相对应的举升油缸伸缩量函数;d为货箱与左右举升油缸上铰接点距离的设计数据。
[0057]
实施例1
[0058]
如图1、图2所示,本发明的矿用自卸车货箱位置测量装置的测量方法,包括如下步骤:
[0059]
1)钥匙开关上电后,控制器开始工作,控制器实时读取位移传感器ⅰ和位移传感器ⅱ输出的电流数据,分别转化为左侧和右侧举升油缸伸缩量,结合举升油缸上铰接点和货箱与车架铰接点连线与货箱底边夹角,以及举升油缸下铰接点和货箱与车架铰接点连线与车架上边夹角的设计数据,利用如图3所示模型,结合公式(1)分别计算得到的货箱左侧和右侧底边与车架上边的夹角即为货箱左侧举升角度和货箱右侧举升角度;
[0060]
根据举升油缸的伸缩量和车辆结构设计数据,计算货箱举升角度:
[0061][0062]
式中:s1为举升油缸上铰接点和货箱与车架铰接点间距;s2为举升油缸下铰接点和货箱与车架铰接点间距;l(i)为位移传感器的电流值对应的举升油缸伸缩量函数;a为举升油缸上铰接点和货箱与车架铰接点连线与货箱底边夹角;b为举升油缸下铰接点和货箱与车架铰接点连线与车架上边夹角;
[0063]
2)控制器计算货箱左侧举升角度和货箱右侧举升角度差值,判断该数据是否有效;
[0064]
21)控制器计算得到的货箱左侧举升角度θ
l
与货箱右侧举升角度θr进行比较,如果|θ
l-θk|≤θk(θk为允许的结构数据偏差),认为车辆举升功能正常,数据有效,货箱没有发生异常侧倾;
[0065]
数据有效时,货箱举升角度值θ取值为左侧举升角度θ
l
和右侧举升角度θr多次测量
的平均值:
[0066]
此时,显示器只显示货箱举升角度;
[0067]
22)控制器计算得到的货箱左侧举升角度θ
l
与货箱右侧举升角度θr进行比较,如果|θ
l-θk|>θk(θk为允许的结构数据偏差),认为货箱发生异常侧倾,控制器结合货箱与左右举升油缸上铰接点距离的设计数据,计算货箱的侧倾角度,如公式(3);
[0068]
数据无效时,货箱侧倾角度计算公式如下:
[0069][0070]
式中:i
l
和ir为某一时刻位移传感器ⅰ和位移传感器ⅱ的电流数据;l(i
l
)和l(ir)为位移传感器电流值相对应的举升油缸伸缩量函数;d为货箱与左右举升油缸上铰接点距离的设计数据;
[0071]
此时显示器分别显示货箱左侧举升角度、货箱右侧举升角度以及货箱的侧倾角度,同时声光报警器进行报警。
[0072]
如上所述,本发明公开的一种矿用自卸车货箱位置测量装置及方法,能够精确的测量货箱工作过程中的实时位置,在车辆举升功能异常时,可准确计算货箱的侧倾角度,在满足经济性的前提下,有效满足了自卸车智能控制和驾驶安全的需要,实用性强。
[0073]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1