用于控制车辆的方法和控制装置与流程
1.本发明涉及用于控制车辆的方法和控制装置。本发明还涉及具有这种控制装置的车辆。
背景技术:
2.已知的是,利用安装在车辆上的传感机构检测车辆环境,以便基于利用传感机构检测到的数据控制车辆。因此关于自动控制车辆例如已知的是,基于此类数据获知对于车辆来说能驶过的区域或车辆环境中潜在的碰撞对象。
技术实现要素:
3.本发明在一个方面中涉及用于控制车辆的方法。车辆可以是自走式作业机械,例如建筑机械或农用机械。该方法可以被执行用以自动化地控制车辆。车辆可以是能无人驾驶运行的车辆。
4.作为一个步骤地,方法具有:读入沿车辆行驶方向位于前方的场地表面的测量数据。场地是对于车辆来说能驶过的场地。场地例如可以是交通道路、农业用地或建筑工地。
5.场地具有近地面障碍物。近地面障碍物可能位于形成场地的地面上,其中,近地面障碍物可能在地面上运动。近地面障碍物例如可能在地面上流动、滑动或滚动。地面可能是坚实的地面。因而,近地面障碍物可能是运动的或者说动态的近地面障碍物,其中,近地面障碍物可能朝向场地的邻接的静态区域运动。沿车辆行驶方向位于前方的场地表面可能具有近地面障碍物的表面。沿车辆行驶方向位于前方的场地表面也可能具有形成场地的地面的表面。因而,地面的表面和近地面障碍物的表面可能共同形成沿车辆行驶方向位于前方的场地表面。
6.近地面障碍物可能是对于车辆来说能驶过的障碍物。近地面障碍物可能是面式覆盖地面的障碍物,该障碍物可能具有与该障碍物的竖直地从地面向上延伸的尺寸相比更大的沿地面延伸的尺寸。近地面障碍物可能是异物。异物可能是可能位于地面上的遗失的运输货物或者说遗失的装载物。因此,近地面障碍物例如可能是来自运输车辆并且现在构成近地面障碍物的建筑材料或散装材料。近地面障碍物例如可能是建筑用木材、树干、砾石或挖出的土壤。异物也可能是可能位于地面上的松散的地面物质或降水物质。近地面障碍物也可能是来自泥石流或雪崩的物质。异物可能暂时位于地面上。
7.近地面障碍物也可能是布置在另一车辆或机械处的近地面障碍物。该近地面障碍物可能由另一车辆或机械运输或运动。例如,近地面障碍物可能由起重机或绞盘在地面上拉动或保持在地面上。
8.然而驶过近地面障碍物可能会影响车辆的行驶动态或者甚至导致在驶过近地面障碍物时车辆失去抓地力。驶过近地面障碍物可能会导致车辆不再能将导向力和制动力传递到形成场地的地面上。因而驶过近地面障碍物可能在一定程度上损害行驶安全性。本发明基于这样的认识,即,对于运动的近地面障碍物来说,在一定程度上可能会发生对行驶安
全性的所述威胁。
9.沿车辆行驶方向位于前方的表面的测量数据利用安装在车辆上的环境检测传感机构来检测。因而,作为另一步骤地,方法具有:利用安装在车辆上的环境检测传感机构来检测测量数据。在方法的另一步骤中,所检测的测量数据可以被过滤。根据一个实施方式,过滤出近地面带内的所检测到的测量数据,其中,仅检测接近地面区域内的测量数据。近地面带可以平行于当前车辆纵轴线延伸。因而如果车辆当前位于倾斜场地上,也可以对测量数据进行过滤。因此,无论车辆相对于水平线的当前倾斜度如何,所检测到的测量数据都可以涉及位于前方的场地,其中,位于前方的临近区域内的场地可以同样是倾斜的。此外,可以栅格式过滤所检测的测量数据。这些测量数据可以基于三维占位栅格(3d-occupance-grid)进行过滤。
10.根据一个实施方式,环境检测传感机构或至少其中一个所述环境检测传感器可以以如下方式布置在车辆上以及环境检测传感机构或环境检测传感器的检测区可以以如下方式取向,即,使得检测区倾斜向下或垂直地对准场地。环境检测传感机构或至少其中一个所述环境检测传感器可以沿车辆纵轴线或与车辆纵轴线间隔开地布置在车辆上。环境检测传感机构或环境检测传感器可以为此抬高或裸露地布置在车辆上。检测区可以以如下方式倾斜向下或垂直取向,即,使得环境检测传感机构或环境检测传感器的至少一个测量束垂直地照射场地。因此,也可以在沿车辆行驶方向位于前方的临近区域内检测场地并且利用该方法也可以识别在该临近区域内的近地面障碍物。
11.环境检测传感机构可以具有至少一个基于图像的环境检测传感器用于检测位于前方的场地表面。基于图像的环境检测传感器可以是相机。因而,测量数据可以具有场地表面的至少一个图像。相机可以是单目相机。环境检测传感机构也可以具有立体相机,从其中可以借助立体摄影测量方法生成场地表面的点云。
12.替选或除了基于图像的环境检测传感器之外,环境检测传感机构还可以具有至少一个测距的环境检测传感器用于无接触扫描位于前方的场地表面。测距的环境检测传感器可以是面状或格栅式扫描场地表面的环境检测传感器。该环境检测传感器例如是激光扫描仪、测距相机、雷达设备或超声波传感器。
13.如果环境检测传感机构具有测距的环境检测传感器,则测量数据可以具有至少一个场地表面点云。测量数据可以具有时间上间隔开的测量数据,其中,测量数据可以是在不同时间检测到的。测量数据也可以具有关于各自的检测地点在地点上间隔开的测量数据,其中,测量数据可能是在沿车辆的运动轨迹的不同地点处被检测到的。
14.作为另一步骤地,方法具有:在所读入的测量数据中识别近地面障碍物。如果环境检测传感机构具有基于图像的环境检测传感器,则可以借助图像处理措施在由基于图像的环境检测传感器检测到的图像中识别近地面障碍物。图像处理措施例如可以具有语义分割、分类措施或人工智能(ai)措施。如果替选或除了基于图像的环境检测传感器之外环境检测传感机构还具有测距的环境检测传感器,则替选或除了图像处理措施之外还借助模式识别措施在由测距环境检测传感器检测到的点云中识别近地面障碍物。模式识别措施例如可以具有自动化的匹配方法或三维重建措施。因而,识别步骤可以执行为在所读入的测量数据中自动化识别近地面障碍物。
15.作为另一步骤地,方法具有:基于所读入的测量数据在车辆绑定坐标系中确定所
识别的近地面障碍物的运动矢量。车辆绑定坐标系可以是布置在车辆上且与车辆关联的坐标系。车辆绑定坐标系可以是环境检测传感机构的传感器坐标系。所检测的测量数据可以具有在传感器坐标系中本地检测到的坐标。车辆绑定坐标系可以是车辆坐标系或者说随同行进的坐标系。方法的步骤可以重复执行。因此,例如可以重复确定运动矢量。
16.所识别的近地面障碍物在车辆绑定坐标系中所确定的运动矢量可以因近地面障碍物的运动所获得。替选或除了近地面障碍物的运动之外,运动矢量还可以因车辆运动所获得。如果近地面障碍物和车辆都运动,则在车辆绑定坐标系中的运动矢量可以因这两者的运动所获得。
17.所读入的测量数据已经可以具有关于近地面障碍物的运动信息,根据这些信息可以确定或者推导出近地面障碍物的运动矢量。运动信息可以是利用安装在车辆上的环境检测传感机构检测到的。运动信息可以是利用安装在车辆上的环境检测传感机构直接或间接检测到的。替选或附加地,运动矢量可以根据时间上间隔开的测量数据来确定。因而,运动矢量可以根据在车辆绑定坐标系中对近地面障碍物进行空间上的跟踪或者说追踪来确定。空间上跟踪或者说追踪可以基于图像处理措施和模式识别措施中的至少一种措施。如果测量数据具有场地表面的点云,则例如可以借助icp算法根据点云来跟踪或者说追踪近地面障碍物。
18.作为另一步骤地,方法具有:在车辆绑定坐标系的上级坐标系中确定车辆的运动矢量。上级坐标系可以是相对于形成场地的地面地点固定的坐标系。近地面障碍物可能在上级坐标系中进行运动。车辆也可能在上级坐标系中进行运动。利用在上级坐标系中确定运动矢量可以可靠检查:近地面障碍物是否为动态的近地面障碍物。
19.根据方法的一个实施方式,作为另一步骤地,该方法具有:比较所确定的运动矢量。比较可以具有对所确定的运动矢量的数值的比较。替选或附加地,比较具有对所确定的运动矢量的取向的比较。
20.在方法的另一步骤中,可以获知所识别的近地面障碍物的一定数量的所确定的运动矢量。根据方法的一个实施方式,作为另一步骤地,该方法具有:将所识别的近地面障碍物的一定数量的所确定的运动矢量与针对所识别的近地面障碍物的一定数量的所确定的运动矢量的预先限定的阈值进行比较。该比较可以提供对测量数据中异常值的探测。该比较也可以是对在驶过时不会给车辆带来安全风险的需要忽略的小物体的过滤。
21.作为另一步骤地,方法具有:检查所识别的近地面障碍物是否为上级坐标系中的动态的近地面障碍物。检查步骤可以基于对所确定的运动矢量的比较来执行。如果所确定的运动矢量的大小和取向相一致,则所识别的近地面障碍物可以是静态的近地面障碍物。如果所确定的矢量彼此反向定向,则所确定的运动矢量的取向相一致。如果所确定的运动矢量的大小和取向至少其中之一彼此偏离,则近地面障碍物可以是动态的近地面障碍物。检查步骤可以基于对所确定的运动矢量之间是否存在对极条件的检查来执行。因而,检查步骤也可以基于对极几何的措施来执行。
22.检查的检查结果可以是:所识别的近地面障碍物是上级坐标系中动态的近地面障碍物。检查的另一检查结果可以是:所识别的近地面障碍物是上级坐标系中静态的近地面障碍物。
23.作为另一步骤地,方法具有:依赖于由检查步骤所获得的检查结果输出用于控制
车辆的运行安全系统的控制信号。当作为检查结果存在的是所识别的近地面障碍物是上级坐标系中动态的近地面障碍物时,可以输出控制信号。对此替选地,当所识别的近地面障碍物是上级坐标系中静态的近地面障碍物时,可以输出控制信号。
24.如果重复执行方法步骤,则可能重复存在一个检查结果。只有当所获得的检查结果存在预先限定的重复数量时,才可以执行输出控制信号的步骤。因此,该方法可以更稳健且更可靠地被实施用于控制车辆的运行安全系统。
25.根据另一实施方式,在所识别的近地面障碍物的多个所确定的运动矢量和相邻静态的场地区域中获知所确定的运动矢量的定向方面的散布性或者说变化。此外,确定所识别的近地面障碍物的运动矢量的步骤和检查步骤可以基于所获知的散布性或者说变化来执行。
26.因而利用本发明可以识别沿车辆行驶方向位于前方的且运动的可能构成相应的场地区域的近地面障碍物,并且基于此操控车辆的运行安全系统。运行安全系统可以被设立成用于在构成近地面障碍物的运动的场地区域之前发出警告或者迫使车辆不驶过该运动的场地区域。
27.根据方法的一个实施方式,作为另一步骤地,该方法具有:读入关于车辆在上级坐标系中的动态的信息。信息可以基于利用安装在车辆上的传感机构检测到的测量数据。传感机构可以具有用于检测车辆的动态的初始测量系统或者说导航传感器。根据该实施方式,对车辆的运动矢量的确定步骤可以基于所读入的信息。因而,车辆运动矢量可以限定了车辆在上级坐标系中的当前动态或者说运动。关于车辆动态的信息可以根据安装在车辆上的里程表读出,其中,该信息可以具有关于车辆的纵向动态的、例如车辆速度的信息。关于车辆动态的信息可以从安装在车辆上的惯性测量系统或导航传感器中读出,其中,该信息可以具有关于车辆的纵向动态和横向动态的、例如车辆姿态或车辆转动的信息。
28.车辆在上级坐标系中的动态可以具有车辆在上级坐标系中的纵向动态。替选或附加地,车辆在上级坐标系中的动态可以具有车辆在上级坐标系中的横向动态。车辆的纵向动态可以具有或者说限定了车辆速度,横向动态可以具有或者说限定了车辆转向角。
29.车辆的运行安全系统的控制可以具有对未来的纵向动态的控制。替选或附加地,运行安全系统的控制可以具有对车辆的未来横向动态的控制。因而,利用该方法可以以依赖于所识别的近地面障碍物的方式来干预车辆的动态,并且避免驶过可能会给车辆安全带来风险的近地面障碍物。
30.根据方法的另一实施方式,环境检测传感机构可以具有雷达设备。雷达设备可以是多普勒雷达设备。利用雷达设备可以检测沿车辆行驶方向位于前方的场地表面的测量数据。根据来自雷达设备的测量数据可以基于多普勒效应检测场地表面上的运动矢量。因而,所识别的近地面障碍物在可以相当于雷达设备的传感器坐标系的车辆绑定坐标系中的运动矢量可以基于在检测时间上所检测到的测量数据来确定。雷达设备可以是扇形或面式测量的雷达设备。换而言之,雷达设备可以是二维测量的雷达设备或三维测量的雷达设备。
31.根据方法的另一实施方式,环境检测传感机构可以具有超声波传感器。利用超声波传感器也可以检测沿车辆行驶方向位于前方的场地表面的测量数据。超声波传感器可以是扇形或面式测量的超声波传感器。换而言之,超声波传感器可以是二维测量的超声波传感器或三维测量的超声波传感器。
32.根据该实施方式,在车辆绑定坐标系中确定所识别的近地面障碍物的运动矢量的步骤可以基于所读入的雷达设备的测量数据来执行。可以由车辆在上级坐标系中的运动获得的雷达设备自身运动可以在确定车辆在上级坐标系中的运动矢量的另一步骤中加以考虑。如果环境检测传感机构具有雷达设备,则近地面障碍物的运动矢量也可以在车辆行驶期间被连续确定。
33.根据方法的一个实施方式,在另一步骤中,近地面障碍物在上级坐标系中的运动矢量可以基于两个所确定的运动矢量来确定。近地面障碍物在上级坐标系中的运动矢量可以是与车辆运动无关的运动矢量,该运动矢量可以相对于场地的静态的区域来确认近地面障碍物的动态或者说运动。因而可以基于两个所确定的运动矢量推断近地面障碍物的动态或者说运动。
34.根据方法的另一实施方式,作为另一步骤地,该方法可以具有:将所识别的近地面障碍物的所确定的运动矢量从车辆绑定坐标系转换到车辆绑定坐标系的上级坐标系中。该转换可以基于车辆在上级坐标系中所确定的运动矢量。该转换可以具有:将车辆在上级坐标系中所确定的运动矢量附加到所识别的近地面障碍物的所确定的运动矢量上。该转换可以基于车辆上的环境检测传感机构的已知安装位置或者说已知的外在校准。该转换还可以具有对所确定的运动矢量进行平移和旋转中的至少其中之一。
35.因而,车辆的运动矢量可以充当校正参数用于确定所识别的近地面障碍物在车辆绑定坐标系中的运动矢量。该转换还可以基于车辆绑定坐标系在上级坐标系中的当前位置。
36.根据该实施方式,检查步骤可以基于车辆和近地面障碍物在上级坐标系中的运动矢量的比较来执行。运动矢量的比较可以具有:对上级坐标系中数值的比较。替选或附加地,运动矢量的比较具有:对运动矢量的取向的比较。
37.根据方法的另一实施方式,运动矢量可以是三维的运动矢量。此外,至少其中一个坐标系还可以是三维的坐标系。因而对所识别的近地面障碍物的所确定的运动矢量的转换步骤可以具有:对所识别的近地面障碍物的所确定的运动矢量的三维转换。因此可以三维或者说在空间上识别近地面障碍物的动态。
38.根据方法的另一实施方式,运行安全系统可以是用于在越过近地面障碍物之前向车辆驾驶员发出警告的警告装置。警告装置是声学警告装置用以发送声学警告信号。替选或附加地,警告装置可以是光学警告装置用以发送光学警告信号。根据该实施方式,在输出控制信号的步骤中可以输出用于控制警告装置的控制信号。警告装置可以基于控制信号被启用。因而可以在越过可能给车辆行驶带来安全威胁的近地面障碍物之前有效地向车辆驾驶员发出警告。
39.根据方法的另一实施方式,运行安全系统可以具有通信装置,用以将近地面障碍物传达给另外车辆或交通参与者。因而可以在近地面障碍物之前向位于车辆环境中的另外车辆或交通参与者发出警告。
40.根据方法的另一实施方式,运行安全系统可以具有用于干预车辆运行的运行装置。运行装置可以具有用于制动车辆的制动装置。制动装置可以具有车辆的行车制动器。运行装置可以具有车辆的底盘装置。底盘装置可以具有车辆的悬架。运行装置可以具有传动装置。传动装置可以具有差速锁。根据该实施方式可以在输出控制信号的步骤中输出用于
控制运行装置的控制信号。可以输出控制信号以控制制动装置。可以操控制动装置以自动化地制动车辆。自动化的制动可以具有对车辆的自动化的减速。自动化的制动可以附加地具有对车辆自动化的停止。因此可以避免越过近地面障碍物。此外,制动装置可以被构造为紧急制动装置用于实施车辆的紧急制动。可以输出用于控制底盘装置的控制信号。底盘装置可以输出用于相对于场地提高车身。可以输出用于控制传动装置的控制信号。可以操控传动装置用于更改传动比率。因而,如果无法防止越过近地面障碍物或者甚至基于驾驶员期望,可以以有效方式触发车辆侧的响应。根据方法的另一实施方式,运行安全系统可以具有用于车辆转向的转向装置。根据该实施方式,在输出控制信号的步骤中输出用于控制转向装置的控制信号。转向装置可以基于控制信号以如下方式被操控,即,使得车辆绕过沿车辆行驶方向位于前方的近地面障碍物。
41.本发明在另一方面中涉及用于控制车辆的控制装置。控制装置可以被设立成用于执行根据前述方面的方法。控制装置可以具有相应的接口或单元,用以执行根据前述方面的方法步骤。控制装置可以构成驾驶员辅助系统的组成部分,其中,控制装置可以操控至少一个驾驶员辅助系统。
42.控制装置具有用于读入沿车辆行驶方向位于前方的场地表面的测量数据的接口,其中,在场地上存在近地面障碍物。控制装置可以与安装在车辆上的环境检测传感机构经由用于读入测量数据的接口相连。测量数据利用安装在车辆上的环境检测传感机构来检测。控制装置具有识别单元,其用于在所读入的测量数据中识别位于场地上的近地面障碍物。
43.控制装置具有确定单元,其用于在车辆绑定坐标系中确定所识别的近地面障碍物的运动矢量以及在车辆坐标系的上级坐标系中确定车辆的运动矢量。控制装置具有检查单元,其用于检查:所识别的近地面障碍物是否为上级坐标系中的动态的近地面障碍物,其中,检查基于对所确定的运动矢量的比较来执行。
44.控制装置还具有用于依赖于由检查所获得的检查结果输出用于控制车辆运行安全系统的控制信号的接口。控制装置可以与运行安全系统经由用于输出控制信号的接口相连。运行安全系统可以充当驾驶员辅助系统或者是该驾驶员辅助系统的组成部分。
45.本发明在另一方面中涉及一种车辆,该车辆具有运行安全系统。运行安全系统可以如同前述方面那样构成。车辆还具有根据前述方面的用于控制运行安全系统的控制装置。车辆可以被构造为能至少部分自动化运行的车辆。车辆可以被构造为自主车辆。根据车辆的一个实施方式,车辆是自走式作业机械。自走式作业机械可以被构造为能至少部分自动化运行的自走式作业机械。自走式作业机械可以被构造为自主的自走式作业机械。
46.关于本发明的一个方面所述的实施方式和特征也可以构成另外方面的相应实施方式或特征。
附图说明
47.图1示出根据本发明的一个相应实施方式的具有用于控制车辆的控制装置的车辆;
48.图2示出根据本发明的一个实施方式的用于控制运行安全系统的控制装置;
49.图3示出根据本发明的一个实施方式的具有用于执行控制车辆的方法的方法步骤
的流程图表。
具体实施方式
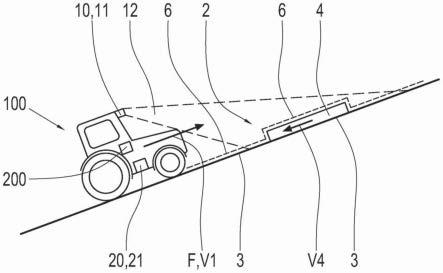
50.图1示出车辆100。根据所示实施方式,车辆100被构造为自走式作业机械,例如拖拉机。车辆100沿车辆100的行驶方向f前进运动。车辆100在场地2上运动。场地2具有对于车辆来说能驶过的表面6。
51.场地2具有近地面障碍物4,其位于场地2的地面3上。近地面障碍物4相对于场地2的地面3运动。场地2的表面6构造为地面3的和近地面障碍物4的共同表面6。由于近地面障碍物4的运动,使得场地2的表面6发生变化。
52.车辆100具有安装在该车辆上的环境检测传感机构10。在一个实施方式中,环境检测传感机构10安装在车辆100的车身或者说车架上。环境检测传感机构10具有检测区12,其倾斜向下指向场地2的表面6。利用检测区12检测的表面6具有由近地面障碍物4形成的表面区域。根据一个实施方式,环境检测传感机构10具有雷达设备11,其在检测区12内基于雷达扫描表面6。如果雷达设备11是多普勒雷达设备,则根据雷达设备11的测量数据确定近地面障碍物4在附图中未示出的车辆绑定坐标系中的运动矢量v4。根据一个实施方式,车辆绑定坐标系是雷达设备11的传感器坐标系。
53.车辆100也具有传感机构20,其用于确定车辆100在图中未示出的车辆绑定坐标系的上级坐标系中的动态。传感机构20具有导航传感器21用于确定车辆100的运动矢量v1。根据一个实施方式,导航传感器21是惯性测量系统的组成部分。
54.车辆100具有控制装置200用于控制车辆100,图2中对其进行详细阐述。控制装置200与图2中所示的车辆100的运行安全系统30相连。此外,控制装置200与车辆100的环境检测传感机构10和传感机构20相连。根据一个实施方式,车辆100的运行安全系统30具有警告装置32用于在沿车辆100的行驶方向f位于前方的近地面障碍物4之前向车辆100的运行者或车辆驾驶员发出警告。根据另一实施方式,车辆100的运行安全系统30具有运行装置34,其被设立成用于干预车辆100运行,以防止车辆100与近地面障碍物4发生碰撞。根据一个示例性的实施方式,运行装置34被设立成用于制动车辆100。
55.图3中以方法步骤的时间顺序根据实施方式示出用于执行控制车辆100的方法的方法步骤。步骤s0至s7由图2中所示的控制装置200执行。控制装置200可以操控用于向车辆100的操作者或车辆驾驶员发出警告的警告装置32或运行装置34。
56.在可选步骤s0中,执行对沿车辆100的行驶方向f位于前方的场地2表面6的测量数据的检测。测量数据在环境检测传感机构10的检测区12内被检测,其中,对沿行驶方向f位于车辆100前方的场地2表面6的接近地面的临近区域进行检测。在图中未示出的实施方式中,在近地面带内依赖于车辆100的空间定向地在上级坐标系中过滤检测区12。在方法的步骤s1中,执行对沿车辆100的行驶方向f位于前方的场地2表面6的测量数据的读入。所读入的测量数据包括表面6的构造在近地面障碍物4上的表面区域的测量数据。
57.在方法的另一步骤s2中,执行:在所读入的测量数据中识别s2近地面障碍物4。根据一个实施方式,执行对在图中未示出的近地面带中的识别。基于利用雷达设备11检测的测量数据来执行在所读入的测量数据中识别近地面障碍物。在识别步骤s2中,识别在车辆绑定坐标系中运动的近地面障碍物4。在车辆绑定坐标系中运动的近地面障碍物4的轮廓基
于近地面障碍物4的运动信息来识别,这些运动信息可以由雷达设备11的测量数据直接推导出。在另一步骤s3中,基于读入的测量数据执行对所识别的近地面障碍物4在车辆绑定坐标系中的运动矢量v4的确定。所识别的近地面障碍物4的运动矢量v4由雷达设备11的测量数据的运动信息确定。
58.在图3中未示出的另一可选步骤中,在上级坐标系中利用导航传感器21检测关于车辆100的动态的信息。在另一步骤s4中,读入这些信息。又在另一步骤s5中,执行基于读入的关于车辆100动态的信息对车辆100在上级坐标系中的运动矢量v1的确定。车辆100的运动矢量v1由导航传感器21的测量数据确定。
59.在另一步骤s6中,比较车辆100和近地面障碍物4的运动矢量v1、v4。如果所确定的运动矢量v1、v4不满足预先限定的对极条件或者运动矢量v1、v4在矢量加法情况下未互相消除,则确定近地面障碍物4相对于场地2的地面3运动。在另一步骤s7中检查:其是否为这种运动的近地面障碍物4。根据一个实施方式,循环或者说重复执行这些步骤s1至s7,直至步骤s7中存在的检查结果以预定数量出现。
60.如果在检查步骤s7中至少一次存在该检查结果,则在另一步骤s8中,输出用于控制运行安全系统30的控制信号。在另一步骤s9中,基于所输出的控制信号控制该运行安全系统30。该控制可以具有对警告装置32和运行装置34中的至少其中之一的控制。
61.附图标记列表
[0062]2ꢀꢀꢀꢀꢀ
场地
[0063]3ꢀꢀꢀꢀꢀ
地面
[0064]4ꢀꢀꢀꢀꢀ
近地面障碍物
[0065]6ꢀꢀꢀꢀꢀ
表面
[0066]
10
ꢀꢀꢀꢀ
环境检测传感机构
[0067]
11
ꢀꢀꢀꢀ
雷达设备
[0068]
12
ꢀꢀꢀꢀ
检测区
[0069]
20
ꢀꢀꢀꢀ
传感机构
[0070]
21
ꢀꢀꢀꢀ
导航传感器
[0071]
30
ꢀꢀꢀꢀ
运行安全系统
[0072]
32
ꢀꢀꢀꢀ
警告装置
[0073]
34
ꢀꢀꢀꢀ
运行装置
[0074]
100
ꢀꢀꢀ
车辆
[0075]
200
ꢀꢀꢀ
控制装置
[0076]fꢀꢀꢀꢀꢀ
行驶方向
[0077]
s0
ꢀꢀꢀꢀ
检测测量数据
[0078]
s1
ꢀꢀꢀꢀ
读入测量数据
[0079]
s2
ꢀꢀꢀꢀ
识别障碍物
[0080]
s3
ꢀꢀꢀꢀ
确定障碍物运动矢量
[0081]
s4
ꢀꢀꢀꢀ
读入信息
[0082]
s5
ꢀꢀꢀꢀ
确定车辆运动矢量
[0083]
s6
ꢀꢀꢀꢀ
比较运动矢量
[0084]
s7
ꢀꢀꢀꢀ
检查动态障碍物
[0085]
s8
ꢀꢀꢀꢀ
输出控制信号
[0086]
s9
ꢀꢀꢀꢀ
控制运行安全系统
[0087]
v1
ꢀꢀꢀꢀ
车辆运动矢量
[0088]
v4
ꢀꢀꢀꢀ
障碍物运动矢量
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1