一种车身高度控制的方法、装置、存储介质及车辆与流程
本发明涉及车身控制,特别是涉及一种车身高度控制的方法、装置、存储介质及车辆。
背景技术:
1、随着汽车行业的快速发展,汽车上越来越多的新的技术被应用,随即而来的是人们对汽车各方面的要求也越来越高。而汽车悬架作为底盘的一个重要组成部分,关系着车辆的操作稳定性和平顺性,越来越受到人们的关注。
2、传统悬架的刚度和阻尼是按经验或优化设计的方法确定的,根据这些参数设计的悬架结构。那么,配置有传统悬架的车辆在行驶过程中,传统悬架的刚度和阻尼特性能是不变的,也是无法进行调节的。
3、然而,发明人发现,当配置有传统悬架的车辆在越野遇到复杂的行驶路况的情况下,会造成车辆的车轮离地,而配置传统悬架的车辆无法通过车辆本身去识别车辆的车轮是否离地,更无法及时对车辆的车身高度进行调节。因此,车辆的车轮离地会使车辆的车轮的驱动力丢失,进而造成车辆的越野性能降低的问题。
技术实现思路
1、有鉴于此,本发明旨在提出一种车辆涉水识别的方法、装置、存储介质及车辆,以避免车辆的车轮离地使车辆的车轮的驱动力丢失,解决了车辆的越野性能降低的问题。
2、依据本发明的第一方面,提供了一种车身高度控制的方法,该方法包括:
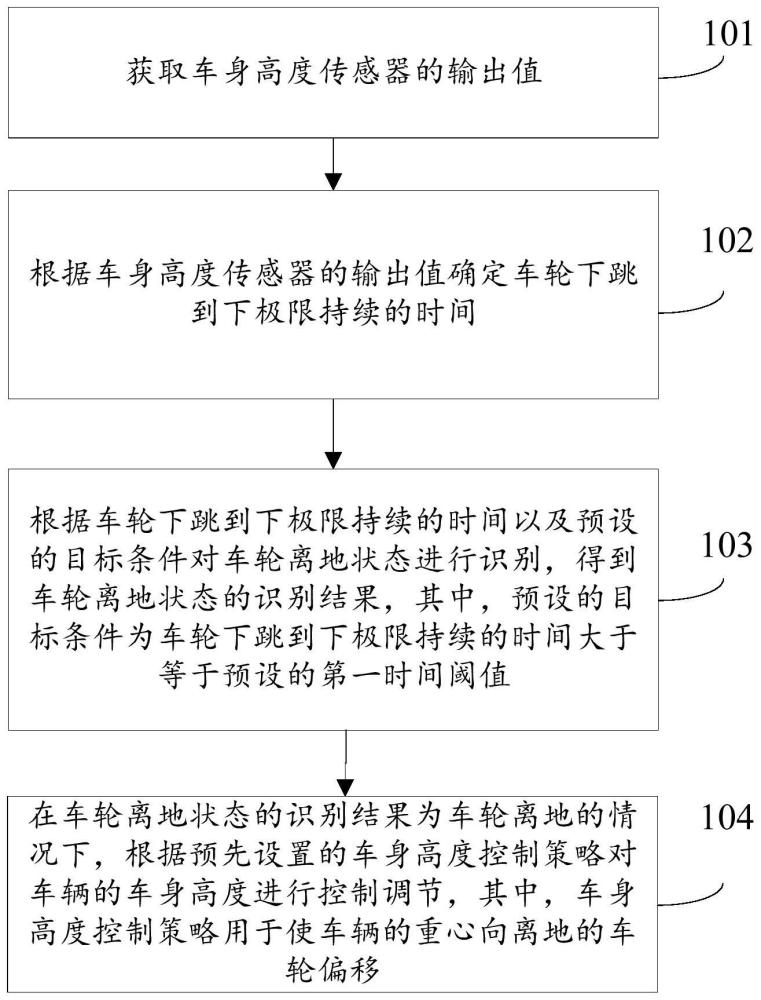
3、获取车身高度传感器的输出值;
4、根据所述车身高度传感器的输出值确定车轮下跳到下极限持续的时间;
5、根据所述车轮下跳到下极限持续的时间以及预设的目标条件对车轮离地状态进行识别,得到所述车轮离地状态的识别结果,其中,所述预设的目标条件为所述车轮下跳到下极限持续的时间大于等于预设的第一时间阈值;
6、在所述车轮离地状态的识别结果为车轮离地的情况下,根据预先设置的车身高度控制策略对车辆的车身高度进行控制调节,其中,所述车身高度控制策略用于使所述车辆的重心向离地的车轮偏移。
7、可选地,所述根据所述车身高度传感器的输出值确定车轮下跳到下极限持续的时间,包括:
8、获取参考范围,其中,所述参考范围为车轮下跳到下极限时对应的车身高度传感器的输出值范围;
9、将所述车身高度传感器的输出值处于所述参考范围的持续时间确定为车轮下跳到下极限持续的时间。
10、可选地,在所述根据预先设置的车身高度控制策略对车辆的车身高度进行控制调节的步骤之前,所述在所述车轮离地状态的识别结果为车轮离地的情况下的步骤之后,包括:
11、将车身高度控制的提示信息发送至所述车辆的中控系统。
12、可选地,所述根据所述车轮下跳到下极限持续的时间以及预设的目标条件对车轮离地状态进行识别,得到所述车轮离地状态的识别结果,包括:
13、在所述车辆的车轮下跳到下极限持续的时间符合预设的目标条件的情况下,确定车轮离地状态的识别结果为车轮离地;
14、在所述车辆的车轮下跳到下极限持续的时间不符合预设的目标条件的情况下,确定车轮离地状态的识别结果为车轮不离地。
15、可选地,所述根据预先设置的车身高度控制策略对车辆的车身高度进行控制调节,包括:
16、将离地车轮两侧的两个车轮的悬架高度降低第一高度;和,
17、将离地车轮对角位置的车轮的悬架高度降低第二高度;所述第一高度大于所述第二高度。
18、可选地,所述根据预先设置的车身高度控制策略对车辆的车身高度进行控制调节,还包括:
19、将离地车轮两侧的两个车轮的悬架高度升高第三高度;和,
20、将离地车轮对角位置的车轮的悬架高度升高第四高度;所述第三高度小于所述第四高度。
21、根据本发明的第二方面,提供了一种车身高度控制的装置,该装置包括:
22、第一数据获取模块,用于获取车身高度传感器的输出值;
23、数据确定模块,用于根据所述车身高度传感器的输出值确定车轮下跳到下极限持续的时间;
24、车轮离地状态识别模块,用于根据所述车轮下跳到下极限持续的时间以及预设的目标条件对车轮离地状态进行识别,得到所述车轮离地状态的识别结果,其中,所述预设的目标条件为所述车轮下跳到下极限持续的时间大于等于预设的第一时间阈值;
25、控制调节车身高度模块,用于在所述车轮离地状态的识别结果为车轮离地的情况下,根据预先设置的车身高度控制策略对车辆的车身高度进行控制调节,其中,所述车身高度控制策略用于使所述车辆的重心向离地的车轮偏移。
26、可选地,所述数据确定模块,包括:
27、数据获取子模块,用于获取参考范围,其中,所述参考范围为车轮下跳到下极限时对应的车身高度传感器的输出值范围;
28、时间数据确定子模块,用于将所述车身高度传感器的输出值处于所述参考范围的持续时间确定为车轮下跳到下极限持续的时间。
29、可选地,所述装置还包括:
30、提示模块,用于将车身高度控制的提示信息发送至所述车辆的中控系统。
31、可选地,所述车轮离地状态识别模块,包括;
32、确定车轮离地子模块,用于在所述车辆的车轮下跳到下极限持续的时间符合预设的目标条件的情况下,确定车轮离地状态的识别结果为车轮离地;
33、确定车轮不离地子模块,用于在所述车辆的车轮下跳到下极限持续的时间不符合预设的目标条件的情况下,确定车轮离地状态的识别结果为车轮不离地。
34、可选地,所述控制调节车身高度模块,包括:
35、降低高度子模块,用于将离地车轮两侧的两个车轮的悬架高度降低第一高度;和,
36、将离地车轮对角位置的车轮的悬架高度降低第二高度;所述第一高度大于所述第二高度。
37、可选地,所述控制调节车身高度模块,还包括:
38、升高高度子模块,用于将离地车轮两侧的两个车轮的悬架高度升高第三高度;和,
39、将离地车轮对角位置的车轮的悬架高度升高第四高度;所述第三高度小于所述第四高度。
40、根据本发明的第三方面,提供一种存储介质,所述存储介质上存储计算机程序。
41、根据本发明的第四方面,提供一种车辆,包括本发明的第二方面所述的一种车身高度控制的装置。
42、本发明实施例提供的一种车身高度控制的方法、装置、存储介质及车辆,通过获取车身高度传感器的输出值;根据车身高度传感器的输出值确定车轮下跳到下极限持续的时间;根据车轮下跳到下极限持续的时间以及预设的目标条件对车轮离地状态进行识别,得到车轮离地状态的识别结果,其中,预设的目标条件为车轮下跳到下极限持续的时间大于等于预设的第一时间阈值;在车轮离地状态的识别结果为车轮离地的情况下,根据预先设置的车身高度控制策略对车辆的车身高度进行控制调节,其中,车身高度控制策略用于使车辆的重心向离地的车轮偏移。本发明通过利用车身高度传感器即可识别出车辆的车轮离地状态,由于车身高度传感器的结构简单以及利用车身高度传感器识别车辆的车轮离地状态的原理简单,进而能够达到节约成本以及快速精准识别的技术效果;本发明通过根据预先设置的车身高度控制策略对车辆的车身高度进行调节,实现了当车辆在越野遇到复杂的行驶路况,发生车轮离地时,能够及时对车辆的车身高度进行调节,增加离地车轮的接地性,避免了车辆的车轮离地使车辆的车轮的驱动力丢失的情况的发生,解决了车辆的越野性能降低的问题。
43、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!