一种融合路面环境和车辆安全模型的辅助巡航主动刹车方法
1.本发明涉及车辆主动刹车技术领域,尤其涉及一种融合路面环境和车辆安全模型的辅助巡航主动刹车方法。
背景技术:
2.随着高级驾驶辅助行业和自动驾驶行业的兴起和成熟,越来越多的自主刹车被应用于车辆上;但由于车辆的刹车受多方面因素的影响,包括车辆本身的刹车系统状态、老化程度、轮胎的磨损等,外部环境包括天气、路面、上下坡等;所以,自主刹车系统亟需一种基于车辆内外部自学习的智能系统,来为司机提供更加全面、准确的刹车信息;主动刹车在车辆无人驾驶技术中,主动刹车模块是重要组成部分,要求在面临不同车况的时产生不同的响应,进行刹车减速、急停的操作,从而确保无人驾驶过程的安全性。主动刹车的优势在于可以主动响应进行辅助刹车,提高驾驶的安全性。
3.目前的主动刹车方法,都是在理想状态下提供的刹车距离数据,没有结合实时的路面情况以及天气对路况的影响,导致不能结合路面情况以及环境对车辆制动时产生的影响进行综合分析,使得主动刹车的方法不够完善,另一方面,没有考虑到车辆在开启巡航时行驶状态,不够智能。
技术实现要素:
4.本发明的目是针对背景技术中存在的问题,提出一种可结合实时的路面情况以及天气对路况的影响,同时结合路面情况以及环境对车辆制动时产生的影响进行综合分析,更加完善的融合路面环境和车辆安全模型的辅助巡航主动刹车方法。
5.本发明的技术方案:一种融合路面环境和车辆安全模型的辅助巡航主动刹车方法,包括以下步骤;
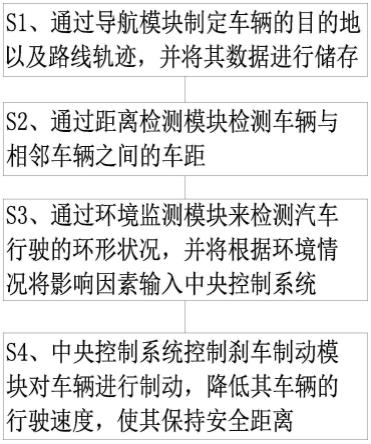
6.s1、通过导航模块制定车辆的目的地以及路线轨迹,并将其数据进行储存;
7.s2、通过距离检测模块检测车辆与相邻车辆之间的车距;
8.s3、通过环境监测模块来检测汽车行驶的环境状况,并将根据环境情况将影响因素输入中央控制系统;
9.s4、中央控制系统控制刹车制动模块对车辆进行制动,降低其车辆的行驶速度,使其保持安全距离。
10.优选的,距离检测模块包括前后车距检测模块和侧方位车距检测模块;
11.前后车距检测模块,用于检测目标车辆与前后车辆之间的距离;
12.侧方位车距检测模块,用于检测目标车辆与左右两侧车辆之间的距离。
13.优选的,在s2中,当车辆无需改变轨迹直行时,通过距离检测模块中的前后车距检测模块来检测前后行驶车辆的车距;当车辆需要改变轨迹进入路口或驶出路口,非直线行驶时,在启动前后车距检测模块测距的同时,启动侧方位车距检测模块,检测是否有足够距离,以此来提高安全性,距离检测模块中通过雷达测距来测量距离和车速。
14.优选的,环境监测模块包括路况采集模和天气检测模块;
15.路况采集模,用于检测目标车辆行驶的当前路况,来计算摩擦以及对制动距离的影响;
16.天气检测模块,用于检测目标车辆行驶过程中处于什么样的天气,来计算摩擦以及对制动距离的影响。
17.优选的,导航模块包括路标采集模块和路标分辨模块;
18.路标采集模块,用于对路边的路标指示牌新型进行拍照收集并与导航轨迹中的数据进行对比,双重认证路标信息;
19.路标分辨模块,用于对采集后的图片信息进行分析辨识,辅助目标车辆制动。
20.优选的,刹车制动模块包括主动制动模块和被动制动模块;
21.主动制动模块,用于在需要驶入或者驶出路口,主动刹车降速,在降速的后通过计算后车行驶速度来调节速度从而驶入路口;
22.被动制动模块,用于前车降速时或者路况变差时,进行制动降低速度。
23.优选的,计算后车速度时,根据测距雷达测出后车单位时间内行驶的距离来换算成与目标车辆的速度差v1,在使出时,使得目标车辆速度大于v1与v0的速度和,其中,v0为目标车辆速度。
24.与现有技术相比,本发明具有如下有益的技术效果:
25.1、通过环境监测模块中的路况采集模块以及天气检测模块与距离检测模块配合,可结合实时的路面情况以及天气对路况的影响,同时结合路面情况以及环境对车辆制动时产生的影响进行综合分析,使得主动刹车的方法更加完善;
26.2、通过主动制动模块和被动制动模块来根据情况对车辆进行制动,多方面考虑到车辆在开启巡航时行驶状态,更加智能。
附图说明
27.图1为本发明一种融合路面环境和车辆安全模型的辅助巡航主动刹车方法的流程图;
28.图2为融合路面环境和车辆安全模型的辅助巡航主动刹车方法的系统框图;
29.图3为导航模块的系统框图;
30.图4为刹车制动模块的系统框图。
具体实施方式
31.实施例一
32.如图1-3所示,本发明提出的一种融合路面环境和车辆安全模型的辅助巡航主动刹车方法,包括以下步骤;
33.s1、通过导航模块制定车辆的目的地以及路线轨迹,并将其数据进行储存;导航模块包括路标采集模块和路标分辨模块;
34.路标采集模块,用于对路边的路标指示牌新型进行拍照收集并与导航轨迹中的数据进行对比,双重认证路标信息;
35.路标分辨模块,用于对采集后的图片信息进行分析辨识,辅助目标车辆制动;
36.s2、通过距离检测模块检测车辆与相邻车辆之间的车距;距离检测模块包括前后车距检测模块和侧方位车距检测模块;
37.前后车距检测模块,用于检测目标车辆与前后车辆之间的距离;
38.侧方位车距检测模块,用于检测目标车辆与左右两侧车辆之间的距离;在s2中,当车辆无需改变轨迹直行时,通过距离检测模块中的前后车距检测模块来检测前后行驶车辆的车距;当车辆需要改变轨迹进入路口或驶出路口,非直线行驶时,在启动前后车距检测模块测距的同时,启动侧方位车距检测模块,检测是否有足够距离,以此来提高安全性,距离检测模块中通过雷达测距来测量距离和车速;
39.s3、通过环境监测模块来检测汽车行驶的环境状况,并将根据环境情况将影响因素输入中央控制系统;环境监测模块包括路况采集模和天气检测模块;
40.路况采集模,用于检测目标车辆行驶的当前路况,来计算摩擦以及对制动距离的影响;
41.天气检测模块,用于检测目标车辆行驶过程中处于什么样的天气,来计算摩擦以及对制动距离的影响;
42.s4、中央控制系统控制刹车制动模块对车辆进行制动,降低其车辆的行驶速度,使其保持安全距离。
43.本实施例中,先通过导航模块制定车辆的目的地以及路线轨迹,对路边的路标指示牌新型进行拍照收集并与导航轨迹中的数据进行对比,双重认证路标信息;并将其数据进行储存;之后通过距离检测模块检测车辆与相邻车辆之间的车距;当车辆无需改变轨迹直行时,通过距离检测模块中的前后车距检测模块来检测前后行驶车辆的车距;当车辆需要改变轨迹进入路口或驶出路口,非直线行驶时,在启动前后车距检测模块测距的同时,启动侧方位车距检测模块,检测是否有足够距离,以此来提高安全性,距离检测模块中通过雷达测距来测量距离和车速;在制动过程中,配合环境监测模块来检测汽车行驶的环境状况,并将根据环境情况将影响因素输入中央控制系统;本发明可结合实时的路面情况以及天气对路况的影响,同时结合路面情况以及环境对车辆制动时产生的影响进行综合分析,使得主动刹车的方法更加完善。
44.实施例二
45.如图1-3所示,本发明提出的一种融合路面环境和车辆安全模型的辅助巡航主动刹车方法,包括以下步骤;
46.s1、通过导航模块制定车辆的目的地以及路线轨迹,并将其数据进行储存;导航模块包括路标采集模块和路标分辨模块;
47.路标采集模块,用于对路边的路标指示牌新型进行拍照收集并与导航轨迹中的数据进行对比,双重认证路标信息;
48.路标分辨模块,用于对采集后的图片信息进行分析辨识,辅助目标车辆制动;
49.s2、通过距离检测模块检测车辆与相邻车辆之间的车距;距离检测模块包括前后车距检测模块和侧方位车距检测模块;
50.前后车距检测模块,用于检测目标车辆与前后车辆之间的距离;
51.侧方位车距检测模块,用于检测目标车辆与左右两侧车辆之间的距离;在s2中,当车辆无需改变轨迹直行时,通过距离检测模块中的前后车距检测模块来检测前后行驶车辆
的车距;当车辆需要改变轨迹进入路口或驶出路口,非直线行驶时,在启动前后车距检测模块测距的同时,启动侧方位车距检测模块,检测是否有足够距离,以此来提高安全性,距离检测模块中通过雷达测距来测量距离和车速;
52.s3、通过环境监测模块来检测汽车行驶的环境状况,并将根据环境情况将影响因素输入中央控制系统;环境监测模块包括路况采集模和天气检测模块;
53.路况采集模,用于检测目标车辆行驶的当前路况,来计算摩擦以及对制动距离的影响;
54.天气检测模块,用于检测目标车辆行驶过程中处于什么样的天气,来计算摩擦以及对制动距离的影响;
55.s4、中央控制系统控制刹车制动模块对车辆进行制动,降低其车辆的行驶速度,使其保持安全距离;
56.相较于实施例一,如图4所示,本实施例区别在于,刹车制动模块包括主动制动模块和被动制动模块;主动制动模块,用于在需要驶入或者驶出路口,主动刹车降速,在降速的后通过计算后车行驶速度来调节速度从而驶入路口;被动制动模块,用于前车降速时或者路况变差时,进行制动降低速度;计算后车速度时,根据测距雷达测出后车单位时间内行驶的距离来换算成与目标车辆的速度差v1,在使出时,使得目标车辆速度大于v1与v0的速度和,其中,v0为目标车辆速度。
57.本实施例中,通过主动制动模块和被动制动模块来根据情况对车辆进行制动,多方面考虑到车辆在开启巡航时行驶状态,更加智能。
58.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1