一种水陆空多域混动球笼自稳无人机系统
1.本发明属于机器人系统技术领域,具体涉及一种水陆空多域混动球笼自稳无人机系统。
背景技术:
2.近年来,在科学技术的引领下,无人机技术的发展进入了新阶段,不仅使用效能更高,滞空时间更长,而且其飞行速度更快,可快速部署。这使得无人机的应用不再局限于航拍、高空作业等传统领域,在军事、勘测等领域,人们也开始利用无人机执行高风险、高强度的任务。但现有无人机大多数采用多旋翼布局,虽然具有一定的稳定性,但多旋翼机械效率低,能耗大,无法进行长时间高强度工作且负载小;同时,多旋翼体积较大,隐蔽性差,起飞降落对地形和姿态要求高,无法满足特殊环境及军事作业要求。大多数多旋翼无人机外壳脆弱,抗干扰性差,在飞行过程中受到撞击极易坠落损毁,环境适应能力较差。
3.共轴双桨是一种被广泛应用于直升机的关键技术,随着技术不断微型化。与多旋翼相比,共轴双桨结构的机械效率更高、机动性更强,不仅能够完成一般作业要求,还能够满足军事、勘测等领域的高强度作业要求。 同时,共轴双桨结构占用的空间更小,隐蔽性好,更适用于室内、管道等复杂作业环境。
4.此外,飞行器的悬空及飞行过程能量消耗巨大,若在不必要飞行或者空中遇到障碍时采用陆行或水航的方式,可以极大延长续航时间。水陆空多模式无人机能够很好的解决这一问题,如:当无人机进行侦查作业时,不需要无人机一直处于飞行状态,无人机可降落至陆地或者海面进行陆行或水航以达到降低能耗的要求;若无人机在陆地或者海面作业时,遇到沟壑、岩石或礁石等复杂场景,可通过飞行越过障碍。另外,无人机在陆地或者海面运动发生导航偏差情况时,也可通过飞行上升至空中,实现及时调整航向的功能。因此,水陆空多模式无人机不仅能做到降低能耗,还具有更广泛的应用空间,更适合应用于野外搜救、险情预警、地质勘察等复杂环境。
5.现有技术有如下的缺点:缺点一:现有共轴双桨无人机大多采用舵片或者倾斜盘结构调整姿态,机械结构复杂,且控制难度较大,同时也会增大整机自身质量。
6.缺点二:现有陆空两栖无人机大多采用轮式、履带式设计,虽然能够较好的拓展作业能力,但独立安装的陆行结构质量大体积大,严重降低了无人机运动的机动性,同时额外的负重也增加了无人机在空中飞行时的能耗;另外,其无法在海面作业也大大局限了应用场景。
7.缺点三:现有无人机保护结构多为固定球壳,虽然能够起到一定的放撞击效果,但受撞击后容易使无人机运动方向发生改变,且在外力力矩的作用下,无人机会发生失控旋转,稳定性不足,增加了控制难度。
8.因此,有必要设计一种水陆空多域混动球笼自稳无人机系统解决上述问题。
技术实现要素:
9.为解决上述问题,本发明公开了一种水陆空多域混动球笼自稳无人机系统,能够在复杂狭窄空间自由运动,具备水陆空全场景作业能力,抗干扰性和机动性更强,在环境勘测、室内作业、军事侦察等领域具有广阔应用前景。
10.为达到上述目的,本发明的技术方案如下:一种水陆空多域混动球笼自稳无人机系统,包括混动飞行器系统、多栖自稳定球笼结构和多模式核心控制器,混动飞行器系统包括共轴双桨结构、倾转旋翼结构以及偏航轴承连接体结构,其中,偏航轴承连接体有偏航轴承和旋转框架组成,偏航轴承套于旋转框架中上端,所述旋转框架包括云台、电池支架和多模式核心控制器支架,摄像机安装与云台上;所述共轴双桨结构设置于多模式核心控制器支架上方,其下端设置有2个防水无刷电机一,防水无刷电机一通过齿轮与共轴双桨桨叶连动,通过电调以调节防水无刷电机一的动作;所述倾转旋翼结构包括旋翼臂和倾转旋翼,其中,旋翼臂沿y轴对称设置于偏航轴承上,其顶端设置有2个防水舵机;所述倾转旋翼分别设置于防水舵机上;所述多栖自稳定球笼结构包括陆行结构、保护球笼以及抗干扰组件;所述陆行结构包括附在球笼上的插槽结构、设置于插槽上的一对内环以及通过轴承套在内环上的外环;所述保护球笼包括空心连杆以及连接件(四通);所述抗干扰组件包括漂浮转环和漂浮转杆,所述漂浮转环转动设置于保护球笼上,漂浮转杆一段转动设置于漂浮转环上,另一端固定设置于偏航轴承上。
11.作为本发明无人机进一步改进,所述多模式核心控制器包括飞控、电调、稳压模块以及飞控数据传输单元,通过螺钉固定于多模式核心控制器支架中;所述飞控包括三轴加速度计、三轴磁力仪、超声波测距仪、气压计、全球定位系统,通过电调与所述共轴双桨和倾转旋翼连接,通过电流计单元与电源管理模块有电连接,用以接受遥控器命令并且实现运动模式的水陆空切换,实时分析无人机的动作和姿态并将数据发往地面站。
12.作为本发明无人机进一步改进,所述倾转旋翼上还分别设置有防水无刷电机二,旋翼转轴可受防水舵机控制于z轴方向和x轴方向之间旋转;在陆行模式和水航模式下,倾转旋翼转轴保持与地面平行,通过调整转速可实现无人机的前进、后退和转向;在飞行模式下,通过旋翼的倾转和差速可实现无人机的俯仰和滚转运动。
13.作为本发明无人机进一步改进,所述的共轴双桨由两个独立的伺服电机驱动,能够进行差速旋转,从而产生偏航扭矩用以在空中作业状态下调整飞行器姿态,实现偏航运动。
14.作为本发明无人机进一步改进,所述倾转旋翼中的两个舵机需同步旋转,以保证两倾转旋翼推力方向始终相同;所述倾转旋翼电机在转轴水平时能够进行差速旋转,从而产生偏航扭矩,用以控制进行陆行和水巡的偏航运动。
15.作为本发明无人机进一步改进,在所述漂浮转环结构中设置有一对滚转轴承和一对俯仰轴承,其中,滚转轴承沿y轴嵌于漂浮转环外侧,与多栖自稳定球笼相连,以实现多栖自稳定球笼结构的滚转运动;俯仰轴承沿x轴嵌于漂浮转环内侧,与漂浮转杆相连,以实现多栖自稳定球笼结构的俯仰运动;漂浮转杆沿x轴固接于中偏航轴承两侧,偏航轴承轴向与z轴平行,以实现多栖自稳定球笼结构的偏航转动。
16.作为本发明无人机进一步改进,所述漂浮转环、漂浮转杆以及空心连杆均采用中空结构,材料为聚乙烯泡沫体,表面涂有耐腐蚀涂层,使无人机可以漂浮在水面上。
17.作为本发明无人机进一步改进,所述电池支架、防水无刷电机、倾转旋翼防水舵机、飞控、电源管理模块表面均贴有高分子防水防渗薄膜;所述多栖自稳定球笼结构表面涂有防水涂料,起到防水作用,保护无人机部件;作为本发明无人机进一步改进,所述保护球笼由空心连杆和四通连接件组成,其中,球笼上半部分的连杆分布密度较大,用以保护共轴双桨并减少对传感器的干扰;摄像机镜头前方不安装连杆;所述陆行结构的内环底部设有配重,用以确保自稳定球笼结构受外界干扰而转动后,可以自主恢复到滚动结构垂直于地面的状态,便于陆空运动的衔接。
18.作为本发明无人机进一步改进,所述地面站系统包括通讯模块,飞行数据显示模块,数据处理模块,在线地图模块,航线规划模块。其中,通讯模块根据串口号和波特率进行串口配置,再由特定通信协议实现飞控与地面站的连接。飞行数据显示模块包括航姿仪表、传感器数据、姿态角曲线、详细信息,用以确定无人机的实时状态。数据处理模块具有保存串口数据、解析pid参数及回放解析显示等功能。在线地图模块可利用机载gps进行飞行器定位及航点轨迹规划。遥控控制可根据多条通道实现飞行器的横滚、俯仰、油门、偏航等操作。
19.本发明的有益效果为:本发明所述的水陆空多域混动球笼自稳无人机系统,通过接受遥控器发出的指令,使多模式核心控制器切换工作状态并控制各伺服电机和伺服防水舵机的状态,从而实现无人机动作姿态的控制。其中,陆行模式下,通过控制防水舵机旋转,使倾转旋翼转轴与地面平行,通过两旋翼的差速转动控制无人机的运动状态,陆行结构可以实现无人机在地面自由运动;飞行模式下,共轴双桨提供主要升力,其差速旋转可是无人机进行偏航运动,倾转旋翼用于提供辅助升力,同时可以通过防水舵机改变转轴的方向,使两旋翼控制无人机的俯仰和滚转运动;水航模式下倾转旋翼转轴与水平面平行,其差速旋转可控制无人机的运动状态;另外,摄像机及图像处理器用以获取周围环境的图像并将数据发送到地面站;两栖自稳定球笼结构可以自由转动,保证无人机在空中受撞击时稳定运行。该无人机系统大大拓宽了无人机的作业环境,提高了无人机对环境的适应能力和抗干扰性,同时提高了无人机的机械效率和灵活性,使得其应用场景更加广泛。该系统不仅可以应用于户外勘测及军事侦察等方面,还可以应用于室内等封闭复杂环境,结构简单,安装方便,易于维护,成本低。
附图说明
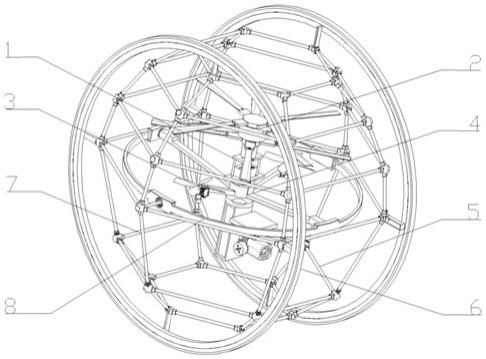
20.图1为本发明提供的水陆空多域混动球笼自稳无人机系统的等轴测图;图2为图1所示的混动飞行器系统在飞行模式下的正视图;图3为图1所示的混动飞行器系统在陆行和水航模式下的正视图;图4为图1所示的多栖自稳定球笼结构的陆行结构和保护球笼的等轴测图;图5为图1所示的多栖自稳定球笼结构的抗干扰组件的俯视图;图6为本发明提供的多模式核心控制器系统的连接图;图7为本发明提供的地面站飞控状态界面;
图8为本发明提供的地面站航点规划界面。
21.附图标识列表:1、混动飞行器系统,2、共轴双桨结构,3、倾转旋翼结构,4、偏航轴承连接体结构,5、多栖自稳定球笼结构,6、陆行结构,7、保护球笼,8、抗干扰组件,9、共轴双桨桨叶,10、齿轮,11、(共轴双桨)防水无刷电机一,12、飞控,13、多模式核心控制器,14、电池支架,15、云台,16、摄像机,17、电调,18、稳压模块,19、飞控数据传输单元,20、安全开关,21、电流计单元,22、旋翼臂,23、倾转旋翼,24、(倾转旋翼)防水无刷电机二,25、倾转旋翼防水舵机,26、电源管理模块,27、插槽结构,28、外环,29、内环,30、空心连杆,31、四通连接件,32、一对俯仰轴承,33、一对滚转轴承,34、漂浮转环,35、漂浮转杆,36、偏航轴承,37、地面站,38、配重,39、飞行数据显示模块,40、通讯模块,41、在线地图模块,42、航线规划模块。
具体实施方式
22.下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。
23.本发明提供了一种能够在水陆空多栖及封闭复杂环境进行作业,抗干扰性和机动性更强的一种球笼形倾转和共轴双桨混动的无人机系统。
24.如图1、图2、图3、图4、图5、图6、图7所示,水陆空多域混动球笼自稳无人机系统包括混动飞行器系统1、多栖自稳定球笼结构5和多模式核心控制器13支架,其中,混动飞行器系统1包括共轴双桨结构2、倾转旋翼结构3以及偏航轴承连接体结构4,其中,偏航轴承连接体4由偏航轴承36和旋转框架组成,偏航轴承36套于旋转框架中上端,旋转框架包括云台15、电池支架14和多模式核心控制器支架13,云台15固接于电池支架14侧面,多模式核心控制器13支架通过螺栓安装于电池支架14顶端,多模式核心控制器通过螺钉固定于多模式核心控制器13支架中;摄像机16安装与云台15上;共轴双桨结构2设置于多模式核心控制器支架13上方,其下端设置有2个防水无刷电机一11;防水无刷电机一11通过齿轮10与共轴双桨桨叶9连动,通过电调17以调节防水无刷电机11动作;倾转旋翼结构3包括旋翼臂22和倾转旋翼23,其中,旋翼臂22沿y轴对称设置于偏航轴承36上,其顶端设置有2个防水舵机25;倾转旋翼23分别设置于防水舵机25上;每个倾转旋翼23上设置有防水无刷电机二24。
25.多栖自稳定球笼结构5包括陆行结构6、保护球笼7以及抗干扰组件8;陆行结构6包括附在球笼上的插槽结构27、设置于插槽上的一对内环29以及通过轴承套在内环29上的外环28;保护球笼7包括空心连杆30以及四通连接件31,空心连杆30两端分别插在四通连接件31的插槽中;抗干扰组件8包括漂浮转环34和漂浮转杆35。
26.上述多模式核心控制器包括飞控12、电调17、稳压模块18以及飞控数据传输单元19,飞控12连接有安全开关20和电调17,通过电流计单元21与电源管理模块26有电连接,用以接受遥控器命令并且实现运动模式的水陆空切换,实时分析无人机的动作和姿态并将数据发往地面站。
27.上述防水无刷电机二24安装于防水舵机25的防水舵机转轴末端,且倾转旋翼23安装于电机轴末端,通过电调17以调节防水无刷电机24和伺服防水舵机25的动作。
28.上述漂浮转环34结构中设置有一对滚转轴承33和一对俯仰轴承32,其中,滚转轴承33沿y轴嵌于漂浮转环34外侧,通过空心连杆30与多栖自稳定球笼5相连;俯仰轴承32沿x
轴嵌于漂浮转环34内侧,与漂浮转杆35相连;漂浮转杆35沿x轴固接于偏航轴承36两侧,偏航轴承36轴向与z轴平行。
29.在陆行结构6的内环29底部设有配重38,用以确保多栖自稳定球笼结构5受外界干扰而转动后,可以自主恢复到陆行结构6垂直于地面的状态。
30.上述安全开关20连接飞控12,用于启动时解锁飞控12和防水无刷电机11、24。
31.上述空心连杆30两端均插于四通连接件31中,组装成保护球笼7。
32.本实施例的工作原理如下:通过接受遥控器发出的指令,多模式核心控制器可切换工作状态并控制各伺服电机和伺服防水舵机的状态,从而实现无人机动作姿态的控制。其中,陆行模式下,通过控制防水舵机25旋转,使倾转旋翼23转轴与地面平行,通过两旋翼的差速转动控制无人机的运动状态,陆行结构6可以实现无人机在地面自由运动;飞行模式下,共轴双桨结构2提供主要升力,其差速旋转可使无人机进行偏航运动,倾转旋翼23用于提供辅助升力,同时可以通过防水舵机25改变转轴的方向,使两旋翼控制无人机的俯仰和滚转运动;水航模式下倾转旋翼23转轴与水平面平行,其差速旋转可控制无人机的运动状态;另外,摄像机16及图像处理器用以获取周围环境的图像并将数据发送到地面站37;多栖自稳定球笼结构5可以自由转动,保证无人机在空中受撞击时稳定运行。
33.需要说明的是,以上内容仅仅说明了本发明的技术思想,不能以此限定本发明的保护范围,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰均落入本发明权利要求书的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1