一种基于两点预瞄驾驶员模型的自动驾驶决策方法
一种基于两点预瞄驾驶员模型的自动驾驶决策方法
背景技术:
1.自动驾驶决策规划模块作为自动驾驶系统的神经中枢,对于自动驾驶车辆的行驶安全性与稳定性具有重要作用。目前的自动驾驶决策技术主要可以分为基于规则的决策方法、基于学习的决策方法以及基于驾驶员模型的决策方法。
2.随着近十年以来人工智能的发展,基于学习的决策方法开始大量涌现,将强化学习、深度神经网络的研究成果应用于自动驾驶的决策,可以在相应的数据集或者仿真场景中取得良好的效果,并且在一定程度上简化了自动驾驶技术的开发流程,成为当前关于自动驾驶决策方法的研究热点之一,但是,基于学习的决策方法在当前情况下并没有能够摆脱对于数据集、仿真场景等因素的依赖,在安全性和可解释性上面存在较大问题,因此无法真正投入自动驾驶实车的决策应用中,特别是在安全方面的不确定性,进一步制约了基于学习的决策方法走向实际的应用场景,国际上以自动驾驶技术落地为目标的车企或研究机构对于基于学习的自动驾驶技术在实车上的应用持谨慎态度。
3.基于规则的决策方法由于其具备较强的可解释性与规则性,因此在自动驾驶实车平台上得到了广泛的应用,该决策方法依赖于车辆行驶过程中的交通规则与行为规则来进行决策结果输出,特点是逻辑明确,可解释性强,并且在实车应用领域经验丰富,能够覆盖较为丰富的交通场景。但基于规则的决策方法存在对于复杂场景的覆盖程度不足的问题,虽然可以通过整体的逻辑框架设计将尽可能多的场景融入决策模型中,但是一旦交通场景不在预设的逻辑范围之内,智能车将无法保证得到安全且合理的决策结果,其拓展性和适应性不足,不能应对条件足够复杂的驾驶场景,无法保证决策结果的安全性。
4.另一方面,基于驾驶员模型的决策方法通过模仿人类驾驶员的驾驶习惯来直接输出车辆的方向盘转角与速度信息,由于结合了道路与交通信息,可以使自动驾驶车辆决策结果的连续性与稳定性得到保障,并且能够使自动驾驶车辆适应高速驾驶场景。在以技术落地为目标的自动驾驶决策方法研究中,而基于驾驶员模型的决策方法能够避免基于学习的方法所带来的不确定性与不可解释性的限制,也能避免基于规则的决策方法所造成的不灵活、不安全的影响,更有利于自动驾驶决策技术在实车平台取得成效。
技术实现要素:
5.本发明所要解决的技术问题是,针对自动驾驶车辆在大曲率路径条件下决策结果偏移误差大的问题,提供一种将驾驶员模型与自动驾驶技术相结合,从而输出更稳定、安全的自动驾驶决策的方法。
6.本发明为解决上述技术问题所采用的技术方案是,一种基于两点预瞄驾驶员模型的自动驾驶决策方法,包括步骤:
7.s1全局路径拟合步骤:
8.获取数字地图中行驶路线的全局轨迹,并对全局轨迹采用三次样条差值法生成稳定且连续的全局参考轨迹;
9.s2基于两点预瞄模型的决策步骤:
10.动态选择预瞄近点与预瞄远点:预瞄近点为车辆前方在预瞄近点距离上的道路中心点,设置初始预瞄远点为车辆前方在预瞄远点距离上的道路中心点;检测在预瞄近点与初始预瞄远点之间是否存在弯道,如否,则为直道场景,预瞄远点为初始预瞄远点,如是,则为弯道场景,预瞄远点为第一个弯道处的切点;
11.确定预瞄近点与预瞄远点之后建立基于远点夹角追踪值θf和近点夹角追踪值θn的预瞄模型:
[0012][0013][0014]
其中,x
car
、y
car
为在自动驾驶系统中车辆在大地坐标系下的横、纵坐标;xn、yn为近点在大地坐标系下的横、纵坐标;xf、yf为远点在大地坐标系下的横、纵坐标;κ
car
为车辆所在位置的曲率,kn为预瞄近点的曲率;
[0015]
s3横向转角值决策步骤:
[0016]
根据预瞄模型综合当前车辆速度决策出最优的前轮转角δ
sω
:
[0017]
δ
sω
=λθn+(1-λ)θf[0018]
其中,λ为比例因子,λ与车辆速度成反比;
[0019]
再将前轮转角值δ
sω
与车辆转向比例相乘得到车辆的方向盘转角,当前时刻的横向转角值决策完成;
[0020]
s4纵向速度决定步骤:
[0021]
直道场景中,车辆的决策速度vd为车辆期望速度v0;弯道场景中,车辆的决策速度vd=min(vs,v0),其中,vs为安全速度;为安全速度;n为在预瞄近点至预瞄远点之间的弯道在全局路径上的追踪点的个数,表示在弯道上第n段的安全速度,所述车辆期望速度v0在规定限速内,所述安全速度vs通过分析预瞄近点与预瞄远点之间弯道的曲率信息k得到。
[0022]
本发明通过结合实时车速与全局参考路径的曲率信息动态确定预瞄点位置,实现两点预瞄理论与纯追踪算法的深度融合。
[0023]
基于两点预瞄模型的决策方法将驾驶员的驾驶特征融入自动驾驶技术中,通过分析并模仿人类驾驶员在开车过程中的行为,能够为自动驾驶提供良好的决策依据,有效减少自动驾驶车辆在大曲率弯道处的横向偏移。动态计算近点预瞄结果与远点预瞄结果在最终决策结果中的比例关系。通过动态比例因子计算,可以得到稳定的横向转角决策结果;通过结合预瞄点之间的道路曲率变化情况与期望车速,输出纵向速度决策结果,降低智能车辆在大曲率弯道处的偏移误差。
[0024]
具体的,预瞄近点距离sn为:
[0025]
sn=knv+dn,
[0026]
其中,v为当前车辆速度,kn为近点预瞄系数,dn为近点基本预瞄距离,dn的取值范围为5~15m;
[0027]
预瞄远点距离sf为:sf=kfv+df,kf为远点预瞄系数,df为远点基本预瞄距离,df取值范围为15~50m。
[0028]
具体的,λ与车辆速度成反比的表现为:
[0029][0030]
其中,α0与α1为调节因子,α
safe
为确保函数连续与稳定的安全因子。
[0031]
进一步的,将前轮转角值δ
sω
与车辆转向比例相乘得到车辆的方向盘转角之后,将该方向盘转角经卡尔曼滤波得到整体最优的方向盘转角输出值。
[0032]
具体的,安全速度vs为:
[0033][0034]
其中,d为全局参考轨迹与车道线的距离,k为当前位置道路曲率,m为车辆的质量,μ为路面摩擦因子,g为重力加速度,θ为预瞄远点与车头方向的夹角。
[0035]
本发明的有益效果是,将驾驶员模型灵活融入自动驾驶决策技术,使决策依据稳定充分,能增强车辆在弯道场景中的行驶稳定性,并能有效提高车辆的行驶效率,实现车辆决策结果的优化,具有良好的实车应用性,能够在实车自动驾驶过程中发挥重要作用。
附图说明
[0036]
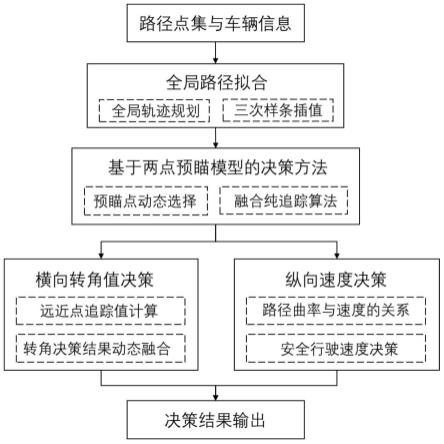
图1为本发明流程图;
[0037]
图2弯道处的预瞄远点分析与选择示意图;
[0038]
图3预瞄点的选取方法示意图;
[0039]
图4弯道处的两点预瞄决策模型示意图;
[0040]
图5为速度决策示意图。
具体实施方式
[0041]
具体步骤如图1所示:
[0042]
1全局路径拟合
[0043]
1.1预瞄点分析与全局路径规划
[0044]
在人类驾驶员在驾驶过程中,当处于直道时,预瞄近点为车辆前方6~8m的道路中心点,而预瞄远点为道路视距尽头点。而在弯道场景中,预瞄近点仍然为车辆前方不远处的道路中心点,而弯道处的预瞄远点有诸多可选择的位置,具体预瞄点的分布情况如图2所示,可选的点包括内车道中点、内车道点、切点、外车道点、车到中点,通过选择不同的预瞄点,能够对智能车辆的横向转角决策产生不同的影响。
[0045]
根据两点预瞄驾驶员理论模型,驾驶员在弯道处进行转向时,当预瞄远点为图2所示切点位置时,驾驶员的转向轨迹更加贴合当前车道中心线,转向效果更好,能够在保证安全的情况下以更高的速度通过弯道,车辆的转向轨迹也更加平滑。
[0046]
由于自动驾驶路径模型是一个预先存储好的数字地图,该二维地图包含完整的道路信息,当车辆需要前往一个目的地时,需要通过全局路径规划的方法从数字地图中选取一条可行驶的全局轨迹,但是该轨迹是以路径点的集合的方式输出至自动驾驶车辆,该点集通常不是均匀分布的,不能满足车辆对于轨迹追踪的需求。因此本发明采用三次样条差值的方法生成稳定且连续的全局参考轨迹。
[0047]
1.2三次样条差值
[0048]
本发明将原始的全局路径的路径点坐标定义为(x0,y0),(x1,y1),
…
,(xn,yn),总共包含n+1个点,将整体的路径分为了n段,每一段路径都可以通过三次样条差值的方法进行插值处理,每一段路径位于起点(xi,yi)与终点(x
i+1
,y
i+1
)之间,i=1,
…
,n,插值方法可以由以下公式确定:
[0049]fi
(x)=ai+bi(x-xi)+ci(x-xi)2+di(x-xi)3[0050]
每个三次样条参数的近似解为:ai=yi,由于所有点必须满足插值条件,即s(xi)=yi(i=0,1,...,n),设mi=s
″i(xi),即),即
[0051]
三次样条插值的输出结果是平滑且连续分布的全局路径参考线,相比原始的路径点,经过插值之后的全局路径更加平滑与连续,更有利于自动驾驶车辆的路径追踪。
[0052]
2基于两点预瞄模型的决策:
[0053]
通过1.1描述,基于视觉信息的两点预瞄驾驶员模型中已经解释了人类驾驶员在开车过程中预瞄近点与预瞄远点的选取依据,如图3所示。本发明将两点预瞄模型与自动驾驶方法进行融合时,结合了全局轨迹、车道线信息与车辆高精定位信息,这可以更加灵活的选取预瞄近点与预瞄远点。
[0054]
动态选择预瞄近点预瞄远点:直道场景中,预瞄近点为车辆前方在预瞄近点距离上的道路中心点,预瞄远点为车辆前方在预瞄远点距离上的道路中心点;弯道场景中,预瞄近点为车辆前方在预瞄近点距离上的道路中心点,预瞄远点为第一个弯道处的切点。
[0055]
预瞄近点距车辆的距离sn应该与车速v建立联系,车速v越高,预瞄近点距离sn越远,速度v与预瞄近点距离sn之间的关系可表示为:
[0056]
sn=knv+dn[0057]
式中,kn为近点预瞄系数,dn为近点基本预瞄距离。
[0058]
对于预瞄远点的选取,在直道情况下,可采用sf=kfv+df建立预瞄远点距离sf与速度的关系v,kf为远点预瞄系数,df为远点基本预瞄距离。
[0059]
在典型弯道场景中,本发明将sf所在的点定义为初始预瞄远点,如果检测出在预瞄近点与初始预瞄远点之间存在弯道,则将第一个弯道处的切点作为本发明的预瞄远点,该点会随车辆的行驶而发生变化,如图3所示。
[0060]
在确定了预瞄远点与预瞄近点之后,本发明可以结合运动学自行车模型计算车辆的转角值,本发明主要分析弯道场景中的转角值计算情况,如图4所示:
[0061]
设转向中心为o,转弯半径为r,道路半径为r,车辆此时刻横向偏差为d,近点横向偏差为y,近点预瞄距离为ln,远点预瞄距离为lf,通过全局路径的轨迹拟合,本发明可以获得全局路径在不同轨迹点的曲率,车辆所在位置的曲率为κ
car
,预瞄近点曲率为kn。通过已知条件,建立基于远点夹角θf和近点夹角θn的预瞄模型,横向决策系统可以根据预瞄远点与预瞄近点的转角计算结果综合决策出最优前轮转角。
[0062]
由图4可得远点夹角θf、近点夹角θn车辆和道路之间的几何关系,如式所示:
[0063]
sinθn=y/ln[0064]
sinθf=lf/r
[0065]
对于θn的计算可以通过:
[0066]
r=1/kn化简得:sinθn=l
nkn
/2;
[0067]
在自动驾驶系统中,可以根据远近点和车辆坐标点在大地坐标系中的坐标来计算出近点预瞄距离ln和远点预瞄距离lf:
[0068][0069][0070]
式中,(x
car
,y
car
)为车辆的坐标点,(xn,yn)为近点坐标点,(xf,yf)为远点坐标点。最终得到车辆前轮转角δ
sω
:
[0071][0072]
式中,α1=λ,α2=1-λ,λ为比例因子。
[0073]
通过上述推导,得出了近点夹角追踪值θn,远点夹角追踪值θf和前轮转角δ
sω
的关系,其中,λ的取值将会对前轮转角产生重要影响。
[0074]
3横向转角值决策:
[0075]
基于两点预瞄的决策方法可以输出两个转角追踪值θn与θf,近点追踪结果与远点追踪结果如何综合应用于最终的车辆决策结果的方式如下:
[0076]
3.1在人类驾驶员开车驾驶过程中,对于预瞄点的信任程度可以总结为:车速较高时较为依赖远点预瞄结果,车速较低时更为依赖近点预瞄结果。通过此概念的分析,可以得出,远点预瞄决策结果与近点预瞄决策结果在最终输出的决策结果中的比例关系λ应该随着车速的变化而变化。因此,本发明通过建立λ与车速v的关系来得到最终的前轮转角δ
sω
。
[0077]
根据上述内容,λ的取值应与车速成反比,本发明可以通过使用指数函数来建立相应的关系表达式:
[0078][0079]
式中,α0与α1为调节因子,α
safe
为确保函数连续与稳定的安全因子,v是车辆速度。对λ(v)求导可得λ
′
(v):
[0080][0081]
通过选择指数函数来计算比例因子λ,不仅可以很好的体现λ与v的反比关系,也可以体现良好的可导性与连续性,通过上述比例因子λ的设计,可以得到前轮转角的最终表达式:
[0082][0083]
3.2通过上述方法可以融合θn与θf的值输出最终的前轮转角值,在典型弯道场景下的轨迹追踪过程中,通过将前轮转角值与车辆转向比例相乘可以计算出车辆的方向盘转角,该方向盘转角值可直接应用于车辆横向决策。
[0084]
由于两点预瞄模型对于横向决策具有的前瞻性,理论上可以实现车辆转角值的连续性。但是每一次的方向盘决策值仍然是通过每一帧道路及自车信息独立决策输出。要考虑方向盘转角的时空连续性,消除安全漏洞则通过卡尔曼滤波实现。
[0085]
3.3基于无迹卡尔曼滤波的转角连续性保障
[0086]
卡尔曼滤波在线性系统的跟踪与预测方面可以发挥良好的作用,由于其预测效率高、稳定性强且易于编程,是被广泛应用于工业界的滤波方法。车辆在自动驾驶过程中,方向盘转角随道路曲率的变化而变化,其转角度数具有非线性,因此,本发明使用无迹卡尔曼滤波的方法来对车辆的方向盘转角进行处理。
[0087]
无迹卡尔曼滤波由于不必通过扩展卡尔曼滤波的方法将非线性系统转化为线性高斯模型,避免了线性误差的影响,因此对于非线性系统的预测结果更加准确。
[0088]
将方向盘转角作为输入值,可以得到整体的基于无迹卡尔曼滤波算法的整体最优方向盘转角输出值。
[0089]
4纵向速度决策:
[0090]
在自动驾驶车辆行驶过程中,车辆速度与道路曲率之间存在关系,道路曲率越大,车辆安全通过弯道的速度越小。通过将车辆速度与道路的弯曲程度建立关系,可以实现基于道曲率信息的车速控制。
[0091]
本发明基于车辆全局行驶轨迹已知的情况,因此车辆在行驶过程中,本发明可以提前获取车辆前方道路的曲率信息,车辆在不同的道路曲率下存在不同的安全速度vs,当车辆在经过该点时,若速度v大于安全速度vs,车辆就可能发生危险情况。根据前文所述的距离可变的两点预瞄模型,本发明可以通过分析预瞄近点与预瞄远点之间路段的曲率信息k来计算在该路段中安全速度。
[0092]
如图5所示,在二维平面坐标系中,不考虑路面坡度的情况下,车辆的安全速度vs与曲率半径r的关系可表示为:
[0093][0094]
式中,m为车辆的质量,μ为路面摩擦因子,g为重力加速度。
[0095]
车辆预瞄点的安全速度vs可以表示为:
[0096][0097]
式中,d为参考轨迹与车道线的距离,k为当前位置道路曲率。
[0098]
对于整段弯道而言,车辆的决策速度vd为:
[0099][0100]
vd=min(vs,v0)
[0101]
式中,v0为车辆期望速度,vm为速度调节裕度,n为在预瞄近点至预瞄远点之间的弯道在全局路径上的追踪点的个数,表示在弯道上第n段的安全速度。
[0102]
通过该方法,可以确定接下来行驶路段中的速度决策值,通过应用于实车决策系统,可以实现自动驾驶车辆的稳定行驶。
[0103]
至此,本发明已经完成对于车辆横向与纵向的决策任务,通过将转角信息与速度信息发送至后续控制节点,可实现智能车辆的自动驾驶功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1