车辆辅助驾驶方法、装置、介质及车辆与流程
本公开涉及车辆,尤其涉及一种车辆辅助驾驶方法、装置、介质及车辆。
背景技术:
1、随着交通业的飞速发展,车辆逐渐成为人们生活的主要代步工具。随着对车辆的数量需求的增长,车辆交通安全问题逐渐成为备受用户关注的问题。
2、在现有发生的交通事故中,由于行车路段的路况因素而导致的交通事故的比重较高,例如车辆在经过进出车库、进出山路、过桥或其他陡坡路段时,由于行车路段限制,出现驾驶员盲区问题,进而引发交通事故,导致安全问题。
技术实现思路
1、为了解决上述技术问题,本公开提供了一种车辆辅助驾驶方法、装置、介质及车辆,以便驾驶员及时查看车辆的四周是否存在风险,提升行车安全性。
2、第一方面,本公开提供了一种车辆辅助驾驶方法,包括:
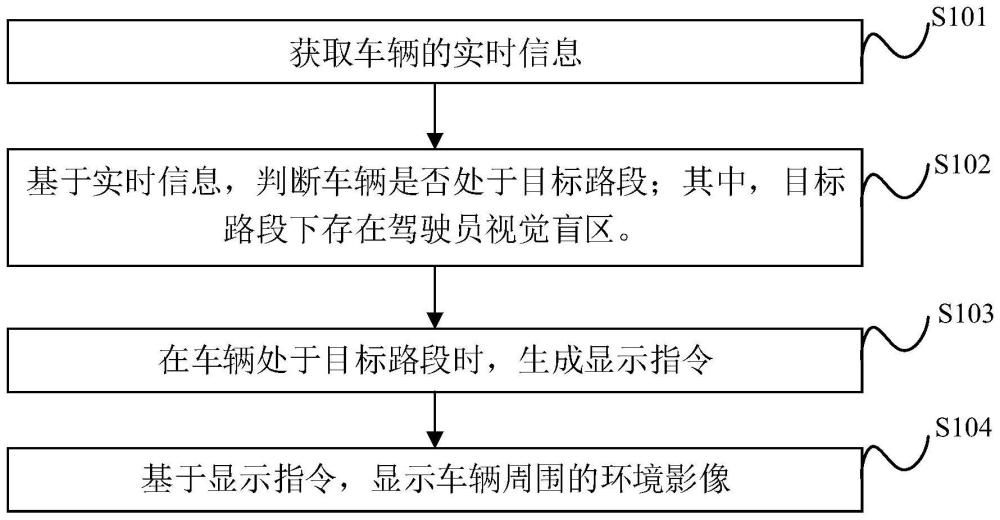
3、获取车辆的实时信息;
4、基于所述实时信息,判断车辆是否处于目标路段;其中,所述目标路段下存在驾驶员视觉盲区;
5、在车辆处于目标路段时,生成显示指令;
6、基于所述显示指令,显示车辆周围的全景影像。
7、可选地,所述实时信息包括环境信息、俯仰角度、转向灯状态、方向盘转向角度和驾驶员头部状态中的至少之一,所述基于所述实时信息,判断车辆是否处于目标路段,包括:
8、基于所述环境信息,判断车辆是否处于转向路段、进车库路段、出车库路段、进山路段、出山路段、进隧道路段、出隧道路段、过桥路段以及过坡路段中的至少一路段;
9、和/或,基于所述俯仰角度,判断车辆是否处于过坡路段;
10、和/或,基于所述转向灯状态、所述方向盘转向角度和所述驾驶员头部状态中的至少之一,判断车辆是否处于转向路段。
11、可选地,所述目标路段包括过坡路段,所述基于所述实时信息,判断车辆是否处于目标路段,包括:
12、基于所述实时信息,确定车辆所在道路的当前坡度;
13、基于所述当前坡度,判断车辆是否处于过坡路段。
14、可选地,所述判断车辆是否处于过坡路段,包括:
15、判断所述当前坡度是否大于预设坡度阈值;
16、在所述当前坡度大于预设坡度阈值时,判断所述当前坡度大于预设坡度阈值的持续时间是否大于预设时间阈值;
17、所述车辆辅助驾驶方法还包括:
18、在所述当前坡度大于预设坡度阈值,且所述持续时间大于预设时间阈值时,确定车辆处于过坡路段。
19、可选地,所述基于所述实时信息,确定车辆所在道路的当前坡度,包括:
20、基于所述实时信息,进行图像特征识别,确定标识特征;所述标识特征包括车道线图像、路边景观距离以及路标指示信息中的至少之一;
21、基于所述标识特征,通过神经网络或者模式识别,确定车辆所在道路的当前坡度;
22、和/或,基于所述实时信息,提取车辆的当前位姿;
23、基于所述当前位姿,确定车辆的俯仰角度,以确定车辆所在道路的当前坡度;其中,所述当前坡度的角度值等于所述俯仰角度的角度值。
24、可选地,所述基于所述转向灯状态、所述方向盘转向角度和所述驾驶员头部状态中的至少之一,判断车辆是否处于转向路段,包括:
25、基于转向灯状态、方向盘转向角度和驾驶员头部状态中的至少一种,判断是否满足转向灯为开启状态、方向盘转向角度大于第一角度阈值以及驾驶员头部发生偏移且偏移超出预设范围中的至少之一;
26、所述方法还包括:
27、在满足转向灯为开启状态、方向盘转向角度大于第一角度阈值以及驾驶员头部发生偏移且偏移超出预设范围中的至少一个条件时,确定车辆处于转向路段。
28、可选地,所述车辆辅助驾驶方法还包括:
29、在车辆处于目标路段时,生成预警指令;所述预警指令至少关联所述目标路段的路段特征;
30、基于所述预警指令,进行安全预警提示。
31、可选地,所述实时信息包括环境信息,所述车辆辅助驾驶方法还包括:
32、获取环境信息;
33、基于所述环境信息,确定车辆周围的障碍物信息;所述障碍物信息包括障碍物位置和/或障碍物与车辆之间的距离;
34、基于所述障碍物信息,生成障碍物提示指令;
35、基于所述障碍物提示指令,进行障碍物位置和/或距离提示。
36、可选地,所述实时信息还包括当前档位信息,所述车辆辅助驾驶方法还包括:
37、获取档位信息
38、基于所述档位信息,生成辅助显示指令;
39、基于所述辅助显示指令,在所述全景影像中叠加显示所述档位信息关联的前摄像头或后像头对应的影像。
40、可选地,所述在所述全景影像中叠加显示所述档位信息关联的前摄像头或后像头对应的影像,包括:
41、当档位信息为前进档位时,控制在所述全景影像中叠加显示前摄像头对应的图像;
42、当档位信息为后退档位时,控制在所述全景影像中叠加显示后摄像头对应的图像。
43、第二方面,本公开实施例还提供了一种车辆辅助驾驶装置,包括:
44、信息获取模块,用于获取车辆的实时信息;
45、路段判断模块,用于基于所述实时信息,判断车辆是否处于目标路段;其中,所述目标路段下存在驾驶员视觉盲区;
46、指令生成模块,用于在车辆处于目标路段时,生成显示指令;
47、影像显示模块,用于基于所述显示指令,显示车辆周围的全景影像。
48、可选地,所述实时信息包括环境信息、俯仰角度、转向灯状态、方向盘转向角度和驾驶员头部状态中的至少之一,所述路段判断模块用于基于所述环境信息,判断车辆是否处于转向路段、进车库路段、出车库路段、进山路段、出山路段、进隧道路段、出隧道路段、过桥路段以及过坡路段中的至少一路段;
49、和/或,基于所述俯仰角度,判断车辆是否处于过坡路段;
50、和/或,基于所述转向灯状态、所述方向盘转向角度和所述驾驶员头部状态中的至少之一,判断车辆是否处于转向路段。
51、可选地,所述目标路段包括过坡路段,所述路段判断模块用于基于所述实时信息,确定车辆所在道路的当前坡度;
52、基于所述当前坡度,判断车辆是否处于过坡路段。
53、可选地,所述路段判断模块用于判断所述当前坡度是否大于预设坡度阈值;
54、在所述当前坡度大于预设坡度阈值时,判断所述当前坡度大于预设坡度阈值的持续时间是否大于预设时间阈值;
55、在所述当前坡度大于预设坡度阈值,且所述持续时间大于预设时间阈值时,确定车辆处于过坡路段。
56、可选地,所述路段判断模块用于基于所述实时信息,进行图像特征识别,确定标识特征;所述标识特征包括车道线图像、路边景观距离以及路标指示信息中的至少之一;
57、基于所述标识特征,通过神经网络或者模式识别,确定车辆所在道路的当前坡度;
58、和/或,基于所述实时信息,提取车辆的当前位姿;
59、基于所述当前位姿,确定车辆的俯仰角度,以确定车辆所在道路的当前坡度;其中,所述当前坡度的角度值等于所述俯仰角度的角度值。
60、可选地,所述路段判断模块用于基于转向灯状态、方向盘转向角度和驾驶员头部状态中的至少一种,判断是否满足转向灯为开启状态、方向盘转向角度大于第一角度阈值以及驾驶员头部发生偏移且偏移超出预设范围中的至少之一;
61、在满足转向灯为开启状态、方向盘转向角度大于第一角度阈值以及驾驶员头部发生偏移且偏移超出预设范围中的至少一个条件时,确定车辆处于转向路段。
62、可选地,所述车辆辅助驾驶装置还包括提示模块;
63、所述指令生成模块用于在车辆处于目标路段时,生成预警指令;所述预警指令至少关联所述目标路段的路段特征;
64、所述提示模块用于基于所述预警指令,进行安全预警提示。
65、可选地,所述实时信息包括环境信息,所述信息获取模块用于获取环境信息,基于环境信息,确定车辆周围的障碍物信息;所述障碍物信息包括障碍物位置和/或障碍物与车辆之间的距离;
66、所述指令生成模块用于基于所述障碍物信息,生成障碍物提示指令;
67、所述提示模块用于基于所述障碍物提示指令,进行障碍物位置和/或距离提示。
68、可选地,所述实时信息还包括当前档位信息,所述信息获取模块用于获取所述档位信息;所述指令生成模块用于基于档位信息,生成辅助显示指令;
69、所述影像显示模块基于所述辅助显示指令,在所述全景影像中叠加显示所述档位信息关联的前摄像头或后像头对应的影像。
70、可选地,所述影像显示模块用于当档位信息为前进档位时,控制在所述全景影像中叠加显示前摄像头对应的图像;
71、当档位信息为后退档位时,控制在所述全景影像中叠加显示后摄像头对应的图像。
72、第三方面,本公开实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行如第一方面提供的任一种车辆辅助驾驶方法的步骤。
73、第四方面,本公开实施例还提供了一种车辆,包括:处理器和存储器;
74、所述处理器通过调用所述存储器存储的程序或指令,用于执行如第一方面提供的任一种车辆辅助驾驶方法的步骤。
75、本公开提供的技术方案与现有技术相比具有如下优点:
76、本公开提供的车辆辅助驾驶方法,通过获取车辆的实时信息;基于实时信息,判断车辆是否处于目标路段;其中,目标路段下存在驾驶员视觉盲区;在车辆处于目标路段时,生成显示指令;基于显示指令,显示车辆周围的全景影像。由此,可通过车辆的实时信息来判断车辆是否处于目标路段,当判定车辆处于目标路段时,表明存在驾驶员视觉盲区,此时生成显示指令,进而基于该显示指令,控制车载显示设备显示车辆周围的全景影像,从而驾驶员可以通过查看全景影像来获取车辆周围的环境信息,以便驾驶员辨别车辆的周围是否存在风险或是否存在潜在风险,由此,通过显示车辆周围的全景影像弥补了驾驶员受限于路段限制而产生的视觉盲区,改善了驾驶员的视觉盲区问题,有利于提升驾驶员判断车辆周围是否存在风险的准确度,进而有利于避免交通事故的发生,提升行车安全,确保驾驶员和车辆乘员的生命安全。
- 还没有人留言评论。精彩留言会获得点赞!