车辆尾灯的控制方法、装置、车辆及存储介质与流程
本发明涉及车辆,尤其是涉及一种车辆尾灯的控制方法、装置、车辆及存储介质。
背景技术:
1、车灯是车辆的重要部件,主要起照明和提示等作用。随着技术的进步,车灯的造型也越来越多样化和个性化,在照明和提示的同时,良好的车灯造型也能够提升整车的美感和产品的竞争力。尾灯是车灯的重要部分,主要在行驶过程中起到警示作用,如向后方车辆提示本车的位置和刹车状态等,以确保驾驶安全性。
2、然而,目前虽然各大车厂车辆尾灯的造型众多,但基本都是固定的造型结构,即车辆尾灯结构不能变形,无法实现动态尾灯的展示效果,导致车辆整体的科技感和智能感不足,用户的用车体验不高。并且在进行警示时,仅是通过点亮尾灯的方式来提示后车,使得提示功能单一,提示效果一般,影响行车安全性。另外,在与后车发生碰撞时,由于尾灯结构固定,不能变形和收缩,因此,无法避免或降低撞击对尾灯的损害,导致尾灯安全性不高。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的目的在于提出一种车辆尾灯的控制方法、装置、车辆及存储介质。
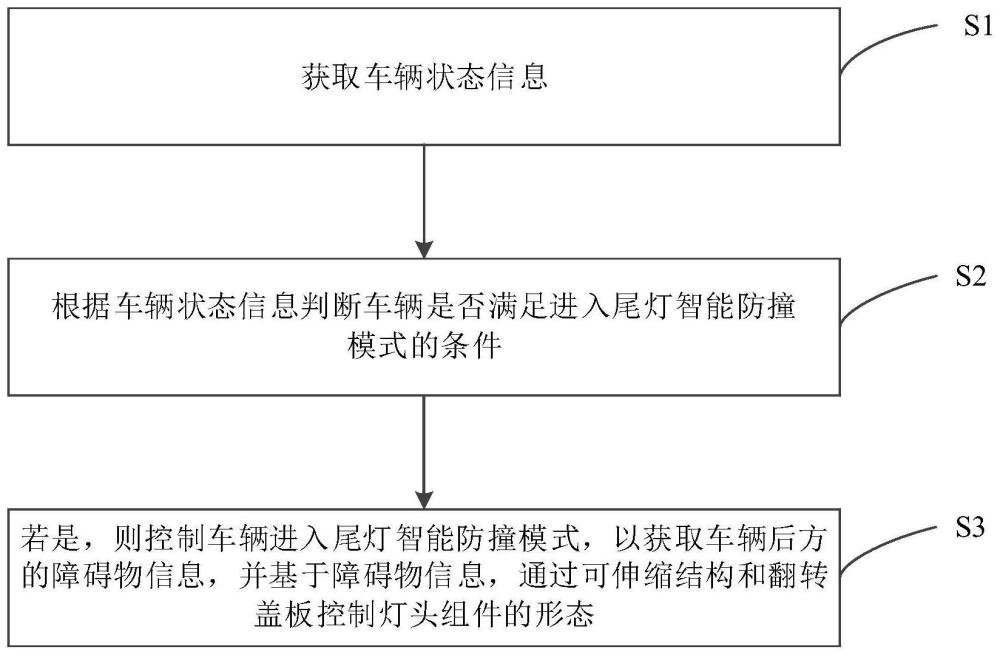
2、本发明提出的一种车辆尾灯的控制方法,所述尾灯包括灯头组件、可伸缩机构和翻转盖板,其中,所述可伸缩机构用于驱动所述灯头组件进行伸缩,所述翻转盖板盖设于所述灯头组件之上,以在所述翻转盖板打开或关闭时,调整对所述灯头组件的遮挡面积,所述控制方法包括以下步骤:获取车辆状态信息;根据所述车辆状态信息判断所述车辆是否满足进入尾灯智能防撞模式的条件;若是,则控制所述车辆进入尾灯智能防撞模式,以获取所述车辆后方的障碍物信息,并基于所述障碍物信息,通过所述可伸缩机构和所述翻转盖板控制所述灯头组件的形态。
3、根据本发明实施例的车辆尾灯的控制方法,通过获取车辆状态信息,根据车辆状态信息判断车辆是否满足进入尾灯智能防撞模式的条件,当车辆满足进入尾灯智能防撞模式的条件时,控制车辆进入尾灯智能防撞模式,以在尾灯智能防撞防撞下,获取车辆后方障碍物信息,并基于障碍物信息,通过可伸缩机构和翻转盖板控制灯头组件的形态,如通过可伸缩机构控制尾灯伸缩,通过翻转盖板调整对灯头组件的遮挡面积,使灯头组件的隐藏面积产生动态变化,从而使尾灯实现炫酷变形,实现了动态尾灯的展示效果,从而提高了车辆的智能感和科技感,提升了用户的用车体验感,同时尾灯的动态变形可以加强对后方车辆的警示作用,从而提高行车安全性;并且,由于尾灯结构可动态变形,灯头组件可以在可伸缩机构的和翻转盖板的驱动下伸缩和改变隐藏面积,因此,在与后车发生碰撞时,可以通过缩回和隐藏灯头组件来有效避免或降低撞击对尾灯的损害,从而提高尾灯的安全性。
4、另外,根据本发明实施例的车辆尾灯的控制方法,还可以具有如下附加的技术特征:
5、进一步地,基于所述障碍物信息,通过所述可伸缩机构和所述翻转盖板控制所述灯头组件的形态,包括:判断所述车辆后方的预设范围内是否存在障碍物;若是,则获取所述障碍物与所述尾灯之间的距离;基于所述障碍物与所述尾灯之间的距离,通过所述可伸缩机构和所述翻转盖板控制所述灯头组件的形态。
6、进一步地,基于所述障碍物与所述尾灯之间的距离,通过所述可伸缩机构和所述翻转盖板控制所述灯头组件的形态,包括:若所述障碍物与所述尾灯之间的距离大于或等于第一预设距离且小于或等于第二预设距离,则控制所述可伸缩机构驱动所述灯头组件运行至第一预设位置或驱动所述灯头组件保持在所述第一预设位置,并控制所述翻转盖板处于关闭状态。
7、进一步地,基于所述障碍物与所述尾灯之间的距离,通过所述可伸缩机构和所述翻转盖板控制所述灯头组件的形态,包括:若所述障碍物与所述尾灯之间的距离大于所述第二预设距离,则控制所述可伸缩机构驱动所述灯头组件运行至第二预设位置或驱动所述灯头组件保持在所述第二预设位置,并控制所述翻转盖板打开至第一预设角度,其中,所述第二预设位置和所述第一预设位置位于预设回收位置的同一侧,且所述第二预设位置与所述预设回收位置之间的距离大于所述第一预设位置与所述预设回收位置之间的距离。
8、进一步地,基于所述障碍物与所述尾灯之间的距离,通过所述可伸缩机构和所述翻转盖板控制所述灯头组件的形态,包括:若所述障碍物与所述尾灯之间的距离小于所述第一预设距离,则控制所述可伸缩机构驱动所述灯头组件缩回至所述预设回收位置或驱动所述灯头组件保持在所述预设回收位置,并控制所述翻转盖板处于关闭状态。
9、进一步地,还包括:根据所述灯头组件所处位置,控制所述灯头组件的亮度,其中,所述灯头组件所处位置越靠近所述预设回收位置,控制所述灯头组件的亮度越大。
10、进一步地,在控制所述可伸缩机构驱动所述灯头组件运行至第二预设位置或驱动所述灯头组件保持在所述第二预设位置,并控制所述翻转盖板打开至第一预设角度之后,还包括:获取环境光线亮度;当所述环境光线亮度小于或等于预设亮度阈值时,控制所述灯头组件输出第一灯光亮度;当所述环境光线亮度大于所述预设亮度阈值时,控制所述灯头组件输出第二灯光亮度,其中,所述第二灯光亮度大于所述第一灯光亮度。
11、进一步地,在控制所述可伸缩机构驱动所述灯头组件运行至第一预设位置或驱动所述灯头组件保持在所述第一预设位置,并控制所述翻转盖板处于关闭状态之后,还包括:获取环境光线亮度;当所述环境光线亮度小于或等于预设亮度阈值时,控制所述灯头组件输出第二灯光亮度;当所述环境光线亮度大于所述预设亮度阈值时,控制所述灯头组件输出第三灯光亮度,其中,所述第三灯光亮度大于所述第二灯光亮度。
12、进一步地,在控制所述可伸缩机构驱动所述灯头组件缩回至所述预设回收位置或驱动所述灯头组件保持在所述预设回收位置,并控制所述翻转盖板处于关闭状态之后,还包括:控制所述灯头组件输出第三灯光亮度。
13、进一步地,基于所述障碍物信息,通过所述可伸缩机构和所述翻转盖板控制所述灯头组件的形态,还包括:若所述车辆后方的预设范围内不存在障碍物,则控制所述可伸缩机构驱动所述灯头组件运行至第三预设位置或驱动所述灯头组件保持在所述第三预设位置,并控制所述翻转盖板打开至第二预设角度,其中,所述第二预设角度大于所述第一预设角度,所述第三预设位置和所述第二预设位置位于所述预设回收位置的同一侧,且所述第三预设位置与所述预设回收位置之间的距离大于所述第二预设位置与所述预设回收位置之间的距离。
14、进一步地,所述根据所述车辆状态信息判断所述车辆是否满足进入尾灯智能防撞模式的条件,包括:当所述车辆上电且点火开关被打开时,确定所述车辆满足进入尾灯智能防撞模式的条件。
15、进一步地,所述控制方法还包括:接收用户通过尾灯控制开关输入的尾灯关闭控制指令;响应所述尾灯关闭控制指令,以控制所述翻转盖板处于关闭状态,并控制所述可伸缩机构驱动所述灯头组件缩回至所述预设回收位置或驱动所述灯头组件保持在所述预设回收位置。
16、针对上述存在的问题,本发明还提出一种车辆尾灯的控制装置,所述尾灯包括灯头组件、可伸缩机构和翻转盖板,其中,所述可伸缩机构用于驱动所述灯头组件进行伸缩,所述翻转盖板盖设于所述灯头组件之上,以在所述翻转盖板打开或关闭时,调整对所述灯头组件的遮挡面积,所述控制装置包括:获取模块,用于获取车辆状态信息;判断模块,用于根据所述车辆状态信息判断所述车辆是否满足进入尾灯智能防撞模式的条件;控制模块,用于当所述车辆满足进入尾灯智能防撞模式的条件时,控制所述车辆进入尾灯智能防撞模式,以获取所述车辆后方的障碍物信息,并基于所述障碍物信息,通过所述可伸缩机构和所述翻转盖板控制所述灯头组件的形态。
17、根据本发明实施例的车辆尾灯的控制装置,通过获取车辆状态信息,根据车辆状态信息判断车辆是否满足进入尾灯智能防撞模式的条件,当车辆满足进入尾灯智能防撞模式的条件时,控制车辆进入尾灯智能防撞模式,以在尾灯智能防撞防撞下,获取车辆后方障碍物信息,并基于障碍物信息,通过可伸缩机构和翻转盖板控制灯头组件的形态,如通过可伸缩机构控制尾灯伸缩,通过翻转盖板调整对灯头组件的遮挡面积,使灯头组件的隐藏面积产生动态变化从而使尾灯实现炫酷变形,实现了动态尾灯的展示效果,从而提高了车辆的智能感和科技感,提升了用户的用车体验感,同时尾灯的动态变形可以加强对后方车辆的警示作用,从而提高行车安全性;并且,由于尾灯结构可动态变形,灯头组件可以在可伸缩机构的和翻转盖板的驱动下伸缩和改变隐藏面积,因此,在与后车发生碰撞时,可以通过缩回和隐藏灯头组件来有效避免或降低撞击对尾灯的损害,从而提高尾灯的安全性。
18、针对上述存在的问题,本发明还提出一种车辆,包括:如本发明上述第二方面实施例所述的车辆尾灯的控制装置,或者,该车辆包括:处理器、存储器,以及存储在所述存储器上并可在所述处理器上运行的车辆尾灯的控制程序,所述车辆尾灯的控制程序被所述处理器执行时实现如本发明上述第一方面实施例所述的车辆尾灯的控制方法。
19、根据本发明实施例的车辆,通过获取车辆状态信息,根据车辆状态信息判断车辆是否满足进入尾灯智能防撞模式的条件,当车辆满足进入尾灯智能防撞模式的条件时,控制车辆进入尾灯智能防撞模式,以在尾灯智能防撞防撞下,获取车辆后方障碍物信息,并基于障碍物信息,通过可伸缩机构和翻转盖板控制灯头组件的形态,如通过可伸缩机构控制尾灯伸缩,通过翻转盖板调整对灯头组件的遮挡面积,使灯头组件的隐藏面积产生动态变化,从而使尾灯实现炫酷变形,实现了动态尾灯的展示效果,从而提高了车辆的智能感和科技感,提升了用户的用车体验感,同时尾灯的动态变形可以加强对后方车辆的警示作用,从而提高行车安全性;并且,由于尾灯结构可动态变形,灯头组件可以在可伸缩机构的和翻转盖板的驱动下伸缩和改变隐藏面积,因此,在与后车发生碰撞时,可以通过缩回和隐藏灯头组件来有效避免或降低撞击对尾灯的损害,从而提高尾灯的安全性。
20、针对上述存在的问题,本发明还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有车辆尾灯的控制程序,所述车辆尾灯的控制程序被处理器执行时实现如本发明上述第一方面实施例所述的车辆尾灯的控制方法。
21、根据本发明实施例的计算机可读存储介质,其上存储的车辆尾灯的控制程序被处理器执行时,通过获取车辆状态信息,根据车辆状态信息判断车辆是否满足进入尾灯智能防撞模式的条件,当车辆满足进入尾灯智能防撞模式的条件时,控制车辆进入尾灯智能防撞模式,以在尾灯智能防撞防撞下,获取车辆后方障碍物信息,并基于障碍物信息,通过可伸缩机构和翻转盖板控制灯头组件的形态,如通过可伸缩机构控制尾灯伸缩,通过翻转盖板调整对灯头组件的遮挡面积,使灯头组件的隐藏面积产生动态变化,从而使尾灯实现炫酷变形,实现了动态尾灯的展示效果,从而提高了车辆的智能感和科技感,提升了用户的用车体验感,同时尾灯的动态变形可以加强对后方车辆的警示作用,从而提高行车安全性;并且,由于尾灯结构可动态变形,灯头组件可以在可伸缩机构的和翻转盖板的驱动下伸缩和改变隐藏面积,因此,在与后车发生碰撞时,可以通过缩回和隐藏灯头组件来有效避免或降低撞击对尾灯的损害,从而提高尾灯的安全性。
22、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!