机电式制动助力装置及其控制方法与流程
1.本发明涉及一种在汽车中用于放大踩下制动踏板时的踏力的机电式制动助力装置及其控制方法。
背景技术:
2.以往,公知有一种为了辅助汽车的制动操作而放大踩下制动踏板时的踏力的制动助力装置,一般使用例如像日本特开昭54-90459号公报(专利文献1)中记载的发明那样利用了发动机(engine)的负压的真空式制动助力装置。
3.可是近年来,世界各国的碳中和的动态变得活跃,为了实现摆脱化石燃料的目标,向电动汽车、燃料电池汽车等不具备发动机作为动力源的汽车的转变成为今后的汽车行业的重要课题。
4.这样一来,作为以往的搭载有发动机的车辆与电动汽车那样的未搭载发动机的车辆之间的区别点之一,由于不具有发动机,所以不会产生以往的系统中使用的发动机的负压(进气管负压),因此,会产生使用负压的各部件变得无法使用的问题。
5.因此,需要一种代替真空式制动助力装置且能够得到在自动制动中也能使用的高制动力的制动助力装置,例如,公知有像日本特开2018-199448号公报(专利文献2)、日本再表2018/097278号公报(专利文献3)中记载的发明那样的具有马达(motor)部作为动力源的机电式的制动助力装置。
6.根据这些以往的机电式制动助力装置,即使是不具有发动机的车,通过使用以电力驱动的马达部,也能够放大踩下制动踏板时的踏力。
7.一般地,该机电式制动助力装置为如下的装置,即,通过安装在与螺杆构件一体地进行动作的支架上的位置传感器来检测被检测体的位移,该被检测体安装在与输入杆联动的控制杆上,该输入杆与制动踏板连结,由此,在踩下制动踏板时,检测上述位移并驱动马达部,利用将马达部的旋转运动变换为螺杆构件的直线运动的旋转直动变换部,将踩下制动踏板时的踏力和马达部的驱动所产生的输出结合,通过放大的力使主缸的活塞前进而产生液压,且即使在马达部未通电的状态(电源断开时)下,仅通过在踩下制动踏板时的踏力也能够使主缸的活塞行进。
8.因此,与所述制动踏板联动的控制杆以及通过所述马达部驱动的螺杆构件基本上相互独立地动作,因此,若在马达部未通电的启动时等情况下踩下制动踏板,则所述控制杆在轴向上进行直线运动,但所述螺杆构件因马达部未被驱动而不移动,因此安装在所述控制杆上的被检测体与安装在所述支架上的位置传感器之间的位置关系会大幅分离。
9.其中,使所述螺杆构件工作的马达部将安装在所述控制杆的被检测体与安装在所述支架上的位置传感器之间的位置关系控制为规定的位置关系,在被检测体的位置到达位置传感器的检测范围外时,会产生无法进行马达部的控制的情形。
10.因此,需要对安装于所述控制杆的被检测体和安装于所述支架的位置传感器的位置的偏离进行限制,例如,像日本特开2010-184699号公报(专利文献4)中记载的那样的利
用能够卡合脱离的离合器机构进行输入构件与输出构件的卡合的结构,此外,例如还公知有如图10的概略图所示那样的通过连杆构件限制移动的结构。
11.如图10中的(a)所示,该结构是一种机电式制动助力装置,具有被检测体46和位置传感器54,被检测体46安装在控制杆40上,位置传感器54安装在与螺杆构件81一体地直线运动的支架90上并检测所述被检测体46,机电式制动助力装置还具有与所述支架90一体地进行动作的连杆构件95。
12.若踩下制动踏板而使所述控制杆40在图10中的(a)所示的黑色箭头的方向上直线运动,则如图10中的(b)所示,所述控制杆40与所述连杆构件95的抵接片96接触,由此,所述被检测体46与所述位置传感器54之间的位置关系被限制在规定的范围内,即所述被检测体46与所述位置传感器54之间的位置关系被限制为所述控制杆40与所述抵接片96之间的间隙成为上限的移动范围,能够避免所述被检测体46脱离检测范围外的情形。
13.但是,对于所述以往的机电式制动助力装置中的限制所述被检测体46与所述位置传感器54之间的位置的偏离的手段,存在以下问题:在结构上的自由度受到限制,且需要增设连杆构件,尤其,在不驱动马达部时的所述控制杆的制动范围受到限制,或增加了不必要的负载等。
14.现有技术文献
15.专利文献
16.专利文献1:日本特开昭54-90459号公报
17.专利文献2:日本特开2018-199448号公报
18.专利文献3:日本再表2018/097278号公报
19.专利文献4:日本特开2010-184699号公报
技术实现要素:
20.发明要解决的问题
21.本发明的课题在于,提供一种机电式制动助力装置,与制动踏板联动的控制杆以及利用马达部工作的螺杆构件能够相互独立地进行直线运动,其中,即使在所述被检测体的位置到达位置传感器的检测范围外时,也能够进行控制而无需追加部件。
22.用于解决问题的手段
23.为了解决上述课题而完成的本发明的机电式制动助力装置具有:
24.输入杆,与制动踏板连结,
25.被检测体,
26.控制杆,安装有所述被检测体,与所述输入杆联动并随着制动踏板的操作而在轴向上进行直线运动,
27.位置传感器,通过检测所述被检测体的位置来检测所述控制杆的位移,
28.马达部,根据所述控制杆的位移而工作,
29.控制部,利用从所述传感器部得到的信息驱动所述马达部,
30.旋转直动变换部,配置在所述控制杆的外周,包括旋转构件和筒状的螺杆构件,所述螺杆构件在外周面形成有螺纹条,所述旋转构件在内周面形成有与所述螺纹条螺合的螺纹槽,所述旋转直动变换部将与所述马达部联动的所述旋转构件的旋转运动变换为所述螺
杆构件的直线运动,
31.支架,安装有所述位置传感器,限制所述螺杆构件的轴旋转且在轴向上联动地移动,
32.复位弹簧,用于对所述支架施力从而使所述支架在移动后返回到原来的位置,以及
33.主缸,与所述控制杆以及所述螺杆构件的前端侧连接,通过所述控制杆或者所述螺杆构件的直线运动使活塞进行进退动作,由此产生液压;
34.所述控制杆以及所述螺杆构件能够相互独立地进行直线运动,当所述控制杆在所述活塞的前进方向上移动了规定以上的距离时,所述被检测体的位置超出所述位置传感器的检测范围,所述机电式制动助力装置的特征在于,
35.仅在所述马达部以及位置传感器从未通电的状态转移到通电状态的情况下,当安装在所述控制杆上的所述被检测体未被所述位置传感器检测到时,通过来自所述控制部的驱动指令强制性地驱动所述马达部,由此使安装在所述支架上的所述位置传感器在所述活塞的前进方向上移动,直到检测出所述被检测体为止,
36.在所述被检测体超出所述位置传感器的检测范围并在所述活塞的前进方向上进行了移动的情况下,执行使所述被检测体的位置恢复至所述位置传感器的检测范围内的恢复处理。
37.根据本发明,即使是控制杆与螺杆构件相互独立地进行直线运动的结构,也不需要追加部件,例如,在车辆等启动时(电源断开(off))等非通电状态下,通过踩下制动踏板,安装在所述控制杆上的所述被检测体位于所述位置传感器的检测范围外,在该状态下,通过电源接通(on)操作转移至通电状态,此时,执行恢复处理,因此,能够非常有效且可靠地使所述被检测体的位置恢复至所述位置传感器的检测范围内从而转移到普通控制。
38.另外,所述恢复处理能够是仅在以下情况下执行的处理:在所述马达部以及位置传感器未通电的状态下踩下制动踏板,所述控制杆向所述活塞的前进方向移动,所述被检测体的位置因超出所述位置传感器的检测范围而未被检测到。
39.而且,在所述输入杆、所述控制杆、所述马达部、所述旋转直动变换部、所述支架以及所述主缸全部同轴地配置的情况下,由于作为整体能够紧凑地构成,所以特别优选。
40.本发明的机电式制动助力装置的控制方法中,所述机电式制动助力装置具有:
41.输入杆,与制动踏板连结,
42.被检测体,
43.控制杆,安装有所述被检测体,与所述输入杆联动并随着制动踏板的操作而在轴向上进行直线运动,
44.位置传感器,通过检测所述被检测体的位置来检测所述控制杆的位移,
45.马达部,根据所述控制杆的位移而工作,
46.控制部,利用从所述传感器部得到的信息驱动所述马达部,
47.旋转直动变换部,配置在所述控制杆的外周,包括旋转构件和筒状的螺杆构件,所述螺杆构件在外周面形成有螺纹条,所述旋转构件在内周面形成有与所述螺纹条螺合的螺纹槽,所述旋转直动变换部将与所述马达部联动的所述旋转构件的旋转运动变换为所述螺杆构件的直线运动,
48.支架,安装有所述位置传感器,限制所述螺杆构件的轴旋转且在轴向上联动地移动,
49.复位弹簧,用于对所述支架施力从而使所述支架在移动后返回到原来的位置,以及
50.主缸,与所述控制杆以及所述螺杆构件的前端侧连接,通过所述控制杆或者所述螺杆构件的直线运动使活塞进行进退动作,由此产生液压;
51.所述控制杆以及所述螺杆构件能够相互独立地进行直线运动,当所述控制杆在所述活塞的前进方向上移动了规定以上的距离时,所述被检测体的位置超出所述位置传感器的检测范围,其特征在于,
52.仅在所述马达部以及位置传感器从未通电的状态转移到通电状态的情况下,通过踩下制动踏板使所述控制杆前进,当安装在所述控制杆上的所述被检测体未被所述位置传感器检测到时,通过来自所述控制部的驱动指令强制性地驱动所述马达部,由此使安装在所述支架上的所述位置传感器在所述活塞的前进方向上移动,直到检测出所述被检测体为止,
53.在所述被检测体超出所述位置传感器的检测范围并在所述活塞的前进方向上进行了移动的情况下,执行使所述被检测体的位置恢复至所述位置传感器的检测范围内的恢复处理。
54.此外,若在所述恢复处理中,在从所述马达部的驱动开始起的规定时间内所述被检测体未被所述位置传感器检测到的情况下,执行故障判断处理,则即使产生被检测体破损、脱落等故障,也能够迅速地进行辨别。
55.发明的效果
56.根据本发明,即使是控制杆与螺杆构件相互独立地进行直线运动的结构,也能够不需要追加部件便能够使所述被检测体的位置恢复至检测范围内并转移到普通控制,能够节省空间,使装置小型化,且在经济性上有利,除此之外,还能够提高设计自由度。
附图说明
57.图1是示出本发明的机电式制动助力装置的优选实施方式的立体图。
58.图2是图1所示的实施方式的俯视图。
59.图3是将图1所示的实施方式中的外壳卸下的状态的俯视图。
60.图4是图2所示的a-a线剖视图。
61.图5是图2所示的b-b线剖视图。
62.图6是图1所示的实施方式的主要部分剖视图。
63.图7是示出图1所示的实施方式中的输入杆、施力构件以及控制杆的分解立体图。
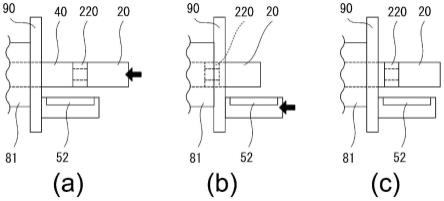
64.图8是示出图1所示的实施方式的主要部分的概略图,图8中的(a)是示出工作前的状态的图,图8中的(b)是示出被检测体移动并位于检测范围外的状态的图,图8中的(c)是示出工作后的状态的图。
65.图9是示出图1所示的实施方式中的恢复处理的工序的流程图。
66.图10是示出现有例的主要部分的概略图,图10中的(a)是示出工作前的状态的图,图10中的(b)是示出工作后的状态的图。
67.附图标记说明
68.1:机电式制动助力装置、10:壳体、11:外壳、12:底板、13:窗口、14:固定螺钉、15:固定构件、16:安装孔、17:安装孔、18:安装孔、20:输入杆、21:连接孔、22:弹簧保持孔、23:制动连接件、30:施力构件、31:螺旋弹簧、32:保持器、33:承受面、40:控制杆、41:板、42:台阶部、43:螺旋弹簧、44:前端部、50:传感器部、51:传感器基座、52:位置传感器、60:马达部、61:定子、62:转子、63:旋转轴、64:轴承、65:轴承、66:检测齿轮、67:检测齿轮、68:马达外壳、70:控制部、71:控制基板、72:马达旋转位置传感器、73:线缆、74:线缆、80:旋转直动变换部、81:螺杆构件、82:旋转构件、83:连结构件、90:支架、91:通孔、92:通孔、93:凸缘衬套、100:支柱、101:小径部、102:大径部、103:前端部、104:螺母、110:复位弹簧、120:主缸、121:缸孔、122:第一输出口、123:第二输出口、124:安装孔、125:螺栓、126:螺母、127:主室、128:副室、130:第一活塞、131:隔壁、132:凹部、133:弹性体、134:螺旋弹簧、135:伸缩构件、136:保持引导件、137:止动部、138:保持杆、139:凸肩部、140:第二活塞、141:隔壁、142:凹部、143、144:螺旋弹簧、145:伸缩构件、146:保持引导件、147:止动部、148:保持杆、149:凸肩部、151:密封构件、152:密封构件、161:密封构件、162:密封构件、210球头螺栓、211轴部、212头部、213凸缘部、220被检测体、221通孔、222一端、223另一端、230接通-断开传感器、bp:制动踏板。
具体实施方式
69.以下,基于附图说明本发明的实施方式。
70.图1至图7是示出本发明的机电式制动助力装置的优选实施方式的图,该机电式制动助力装置1具有壳体10、输入杆20、施力构件30、控制杆40、传感器部50、马达部60、控制部70、旋转直动变换部80、支架90、支柱100、复位弹簧110以及主缸120。
71.壳体10包括圆筒状的外壳11和环状的底板12。此外,附图标记13是在所述外壳11上形成的用于安装外部连接器的窗口,附图标记14是用于固定所述外壳11和所述底板12的固定螺钉,附图标记15是用于将所述壳体10固定于汽车的车体的固定构件。
72.输入杆20整体呈棒状,能够在轴向上移动且能够在规定角度范围内摇动,在一端侧(控制杆40侧),在其端面上连续地形成有连接孔21和弹簧保持孔22,连接孔21在所述输入杆20的轴向上延伸,弹簧保持孔22在所述轴向上延伸且直径比所述连接孔21小,输入杆20在另一端侧安装有制动踏板连接件23,制动踏板连接件23用于在周向上自由旋转地与制动踏板bp连接。
73.施力构件30包括发挥反作用力的螺旋弹簧31和保持器32,保持器32整体呈圆锥形,在内侧具有研钵状的承受面33。
74.控制杆40整体呈棒状,能够在轴向上移动,在一端侧(输入杆20侧)以利用凸缘部213将用于位置检测的磁铁即圆筒状的被检测体220外装为无法脱落的状态固定有球头螺栓210,在另一端侧形成有用于与板41卡合的台阶部42以及用于外装螺旋弹簧43的小径的前端部44。
75.所述保持器32以使所述承受面33朝向外侧的状态配置在所述输入杆20的所述连接孔21中,在所述弹簧保持孔22与所述保持器32之间配置有所述螺旋弹簧31,在将安装在所述控制杆40上的球头螺栓210的球状的头部212插入所述输入杆20的连接孔21且所述保
持器32的承受面33与所述球头螺栓210接触的状态下,所述输入杆20和所述控制杆40以使所述连接孔21的外侧端缘缩小直径的方式变形而被铆接连接,形成球接头机构。
76.此时,经由所述保持器32传递的所述螺旋弹簧31的作用力作用在将所述球头螺栓210与所述输入杆20相互远离的方向上,由此,能够发挥与现有的用于保持杆位置的弹簧相同的效果,能够防止所述输入杆20因自重而倾倒、在所述输入杆20与所述控制杆40之间产生间隙从而产生异响或动作的紊乱。
77.传感器部50包括传感器基座51和位置传感器52,由所述位置传感器52检测出的所述被检测体220的位移量作为信号经由所述传感器基座51而被输出。
78.马达部60包括定子61、转子62、与所述转子62同步旋转的旋转轴63以及将所述旋转轴63支撑为能够在周向上旋转的两个轴承64、65。此外,附图标记66、67是用于检测转数的检测齿轮,附图标记68是以从所述底板12立设的方式安装并覆盖所述马达部60的马达外壳。
79.控制部70是控制基板71,具有用于对经由电源线缆(未图示)从外部供给的电力进行控制并驱动马达部60的马达驱动器的功能,所述控制基板71经由线缆73、74与所述位置传感器52以及马达旋转位置传感器72连接,利用来自各传感器的信号驱动所述马达部60。
80.尤其,在本实施方式中,不进行使从各传感器得到的信息经由电子控制单元(ecu:electronic control unit)的马达的反馈控制,从各传感器得到的信息被直接发送至所述控制基板71,所述控制基板71能够直接控制马达部60,因此具有使功能独立而不需要复杂的控制的优点。
81.此外,在本实施方式中,设置有两组所述马达旋转位置传感器72以及对应的检测齿轮66、67,通过使用性能不同的马达旋转位置传感器,能够同时实现马达控制的高精度化和高速化,但也可以仅设置一组旋转位置传感器以及对应的检测齿轮。
82.另外,旋转位置传感器是用于检测所述马达部60(所述旋转轴63)的旋转位置的传感器,但也可以是例如用于检测所述马达部60(所述旋转轴63)的旋转速度(rotational speed)或转数(rotational frequency)的旋转速度传感器或转数传感器。
83.旋转直动变换部80是用于将所述马达部60的旋转运动变换为直线运动的机构,由进给丝杠机构构成,该进给丝杠机构包括圆筒状的螺杆构件81、螺母状的旋转构件82以及圆筒状的连结构件83,螺杆构件81在外周面形成有螺纹条,旋转构件82在内周面形成有螺纹槽且与所述螺杆构件81螺纹嵌合,连结构件83将所述旋转构件82与所述旋转轴63连结。在本实施方式中,所述旋转构件82与所述连结构件83分体形成并结合为一体,但也可以一体成型。
84.支架90在俯视观察时呈大致正三角形且在中心位置以及各顶点附近形成有通孔91、92。在中心位置的所述通孔91中插入所述螺杆构件81并固定,且支架90经由分别安装于所述各顶点附近的通孔92的凸缘衬套93安装在三根支柱100上,由此构成为不能进行轴旋转且能够在轴向上移动,限制所述螺杆构件81的轴旋转且在轴向上联动地移动。
85.3根支柱100架设在所述外壳11与所述底板12之间,将在支柱100的一端附近形成的小径部101插入在所述底板12形成的安装孔16中,且与所述小径部101相邻而形成的大径部102与所述底板12接触,由此进行定位,且通过在从形成于所述外壳11的安装孔17突出的支柱的前端部103安装螺母104来进行固定。
86.复位弹簧110用于对所述支架90施力从而使所述支架在移动后返回到原来的位置,分别外装在设置于所述外壳11与所述底板12之间的3根用于加固的支柱100上,一端与所述底板12接触,另一端与所述凸缘衬套93接触。
87.主缸120包括缸孔(cylinder bore)121、第一活塞130以及第二活塞140,缸孔121为有底筒状且在侧面形成有第一输出口122和第二输出口123,第一活塞130配置于所述缸孔121内,第二活塞140配置于所述缸孔121内比所述第一活塞130靠底面侧的位置,主缸120配置为使所述缸孔121的开口部面相所述壳体10下方的开口部并封闭,通过在使所述缸孔121的安装孔124以及所述底板12的安装孔18连通的状态下插通的螺栓125以及螺母126将主缸120固定。
88.第一活塞130的两端部分别形成为杯状,形成为被隔壁131划分的h字状剖面。作为反作用盘(reaction disc)的弹性体133嵌入在所述隔壁131的基端侧(所述控制杆40侧)形成的凹部132中,所述控制杆40的前端部45与所述弹性体133接触。
89.第二活塞140的两端部分别形成为杯状,形成为被隔壁141划分的h字状剖面。在所述隔壁141的基端侧(所述第一活塞130侧)形成有凹部142,后述的保持杆148与所述凹部142接触。
90.在主缸120的缸孔121内,在第一活塞130与第二活塞140之间形成有主室127,在缸孔121的底部与第二活塞140之间形成有副室128。另外,包括所述主室127以及副室128的缸孔121内充满作为工作流体的制动液,所述制动液从未图示的储液器供给。
91.此时,通过密封构件151、152以及密封构件161、162,制动液不会漏出至规定的区域外,密封构件151、152安装在所述第一活塞130的外周与所述缸孔121的内周之间,密封构件161、12安装在所述第二活塞140的外周与所述缸孔121的内周之间。
92.主缸120的主室127以及副室128分别与在缸孔121的侧面形成的第一输出口122以及第二输出口123连接,从各输出端口将由其他系统输出的制动液的液压供给至各车轮的制动器(未图示)从而产生制动力。
93.在第一活塞130与第二活塞140之间插装有螺旋弹簧134,通过螺旋弹簧134,在将第一活塞130和第二活塞140相互远离的方向上施力。在螺旋弹簧134的内部配置有伸缩构件135,伸缩构件135包括用于将第一活塞130与第二活塞140之间保持为规定的间隔的保持引导件136以及保持杆138。
94.保持引导件136呈圆筒状,在前端形成有向内侧突出设置的止动部137。保持杆138呈棒状,在基端形成有向径向外侧突出设置的凸肩部139。而且,通过向保持引导件136内插入保持杆138,两者能够沿着轴向相对移动,在保持引导件136的止动部137与保持杆138的凸肩部139干涉的时间点,伸缩构件135伸长为规定的长度。
95.在所述第二活塞140与所述缸孔121的底部之间插装有螺旋弹簧144,通过螺旋弹簧144,在将第二活塞140和所述缸孔121的底部相互远离的方向上施力。在螺旋弹簧144的内部配置有伸缩构件145,伸缩构件145包括用于将第二活塞140与所述缸孔121的底部之间保持为规定的间隔的保持引导件146以及保持杆148。
96.保持引导件146呈圆筒状,在前端形成有向内侧突出设置的止动部147。保持杆148呈中空棒状,在基端形成有向径向外侧突出设置的凸肩部149。而且,通过向保持引导件146内插入保持杆148,两者能够沿着轴向相对移动,在保持引导件146的止动部147与保持杆
148的凸肩部149干涉的时间点,伸缩构件145伸长为规定的长度。
97.在本实施方式中,充分利用所述输入杆20的外周部的空间,与所述被检测体220对应地在所述支架90的上表面配置所述传感器部50的传感器基座51以及位置传感器52,能够节省空间地进行所述被检测体220的位置检测。
98.而且,所述球头螺栓210的轴部211插通通孔221,通孔221以与作为磁铁的所述圆筒状的被检测体220的轴线一致的方式形成,通过在所述轴部211与所述头部212之间突出形成的凸缘部213保持所述被检测体220的一端222,且通过所述控制杆40的端部保持所述被检测体220的另一端223,由此,将所述被检测体220以无法脱落的方式外装在所述控制杆40上。
99.另外,如所述图6所示,在制动踏板bp上安装有接通-断开传感器230,在踩下制动踏板时,接通-断开传感器230发出接通信号,在未踩下制动踏板时,接通-断开传感器230发出断开信号,所述接通-断开传感器230与所述控制部70连接。
100.该接通-断开传感器230毫无疑问能够用于判断制动踏板bp的踩踏,还可以用于将车辆等在启动后从所述接通-断开传感器230发出断开信号时的所述被检测体220的位置修正为初始位置。
101.在本实施方式中,与作为制动助力装置的动作直接相关的所述输入杆20、所述控制杆40、所述马达部60、所述旋转直动变换部80、所述支架90以及所述主缸120全部同轴地配置(参照图4、图5),因此,整体能够构成为节省空间的结构。
102.以下,说明本实施方式的机电式制动助力装置1的动作。
103.在将机电式制动助力装置1安装在汽车中的状态下,当驾驶员踩下制动踏板bp时,与制动踏板bp连接的输入杆20在轴向上移动,控制杆40与所述输入杆20同步地进行直线运动。
104.此时,所述控制杆40和所述螺杆构件81不同步,能够分别地在轴向上移动,因此,所述螺杆构件81的位置不变化,仅所述控制杆40移动。
105.而且,所述控制杆40对抗所述螺旋弹簧43、134、144的作用力而使所述第一活塞130以及第二活塞140前进。
106.另外,若所述控制杆40移动,则利用从检测出其位移的位置传感器52向控制部70发送的信号,所述控制部70进行向马达部60供给电力以及工作信号的控制,马达部60工作并旋转。
107.此外,另外具有通过检测出安装在旋转轴63上的检测齿轮66、67的转数来检测马达转数的马达旋转位置传感器72,在所述控制部70进行向马达部60供给电力以及工作信号的控制时,能够利用从所述马达旋转位置传感器72经由线缆74向控制部70发送的信号。
108.在所述马达部60旋转时,所述旋转构件82经由所述连结构件83与所述旋转轴63同步旋转,但所述螺杆构件81由于被所述支架90限制了轴旋转,所以将螺纹嵌合中的所述旋转构件82的旋转动作变换为直线动作,从而在使轴线上的所述第一活塞130以及第二活塞140前进的方向上移动。
109.此时,所述支架90也与所述螺杆构件81同步地将所述复位弹簧110压缩并在使轴线上的所述第一活塞130以及第二活塞140前进的方向上移动,但由于一边经由所述凸缘衬套93被所述支柱100引导一边滑动,因此能够流畅地动作。
110.然后,所述螺杆构件81经由板42对抗所述螺旋弹簧134、144的作用力而使所述第一活塞130以及第二活塞140前进。
111.这样,驾驶员踩下制动踏板bp时的踏力经由所述输入杆20、所述控制杆40直接施加于主缸120的第一活塞130、第二活塞140,此外,将所述马达部60的旋转动作变换为螺杆构件81的直线动作的推压力经由所述螺杆构件81施加于主缸120的第一活塞130、第二活塞140,由此,通过使用由电力驱动的马达,能够放大在踩下制动踏板bp时的踏力。
112.而且,随着驾驶员对制动踏板bp的踩踏被解除而制动踏板bp返回原来的位置,与制动踏板bp连结的输入杆20以及控制杆40也恢复到原来的位置,所述控制杆40移动,由此,根据来自检测到控制杆40的位移的位置传感器52的信号,控制部70进行向马达部60供给电力以及工作信号的控制,所述马达部60工作并反转(contra-rotating)。
113.在所述马达部60反转时,所述旋转构件82经由所述连结构件83与所述旋转轴63同步地反转,但所述螺杆构件81由于被所述支架90限制了轴旋转,所以螺纹嵌合中的所述旋转构件82的旋转动作变换为直线动作,从而在使轴线上的所述第一活塞130以及第二活塞140后退的方向上移动。
114.此外,即使因为所述马达部60或控制部70的不良而使所述马达部60无法正常地反转,也能够通过所述螺旋弹簧134、144以及复位弹簧110的作用力使所述螺杆构件81以及主缸120的第一活塞130、第二活塞140后退并返回至工作前的原始位置。
115.以下,对所述图1所示的实施方式的概略图即图8以及图10所示的现有例的概略图进行比较,并参照图9所示的示出本实施方式中的使被检测体的位置恢复至检测范围内的恢复处理的工序的图表来说明本发明的要点。此外,对于表示各要素的附图标记,赋予与所述图1至图7所示的要素相同的附图标记。
116.如图8中的(a)所示,本实施方式的结构为,控制杆40与螺杆构件81完全独立,不具有所述图10所示的现有例那样的连杆构件95等,因此,在马达部60未驱动的情况下,螺杆构件81能够不跟随控制杆40地相互在轴向上进行直线运动,当所述控制杆40在主缸120的第一活塞130以及第二活塞140的前进方向上移动了规定以上的距离时,所述被检测体220的位置超出所述位置传感器52的检测范围。
117.首先,从图9所示的在马达构件60以及位置传感器52未通电的车辆等启动时等的电源断开状态开始(工序s1),若踩下制动踏板bp(工序s2),则所述控制杆40在图8中的(a)的黑色箭头的方向上进行直线运动而向前端方向移动(工序s3),因此,能够仅通过踏力使主缸120的第一活塞130以及第二活塞140前进,由此产生制动液的液压,使制动器(未图示)工作。
118.此时,仅控制杆40在图8中的(a)的黑色箭头的方向上进行直线运动并向前端方向移动,因此,如图8中的(b)所示,安装在控制杆40上的被检测体220处在位于位置传感器52的检测范围外的状态。
119.之后,进行车辆等的电源接通操作,成为马达构件60以及位置传感器52通电的状态(工序s4),在通过位置传感器52不能检测到被检测体220的情况下(工序s5),从控制部70向马达部60发出强制性驱动指令,使马达部60驱动,由此,经由旋转构件82使螺杆部81以及支架90在使主缸120的第一活塞130以及第二活塞140前进的方向即图8中的(b)的黑色箭头的方向上进行直线运动。
120.通过使支架90在图8中的(b)的黑色箭头的方向上进行直线运动,安装在支架90上的位置传感器52也随之在相同的方向上移动,因此,能够尝试使所述被检测体220的位置恢复至所述位置传感器52的检测范围内。
121.此时,如图8中的(c)所示,被检测体220的位置恢复至所述位置传感器52的检测范围内,在成功检测到被检测体220的情况下(行程s8a),能够转移到普通控制(行程s9a),完成恢复处理。
122.但是,在从马达部60的驱动开始起的规定时间内无法检测到被检测体220的情况下(行程s8b),执行故障判断处理(行程s9b)。此外,也可以通过例如灯或蜂鸣器等输出单元(未图示)以驾驶员等能够识别的方式通知已经进行了故障判断。
123.被检测体220到达位置传感器52的检测范围外的条件可以考虑以下两种,即,通过踩下制动踏板bp,安装有被检测体220的控制杆40先行,仅通过踏力使制动器工作,或者被检测体220产生破损、脱落等故障;但若被检测体220没有问题,则使被检测体220的位置恢复并转移到普通控制,若被检测体220存在问题,则能够进行故障判断。
124.如上所述,根据本发明,即使是控制杆与螺杆构件相互独立地进行直线运动的结构,也不需要追加部件便能够使所述被检测体的位置恢复至检测范围内并转移到普通控制,能够节省空间,使装置小型化,且在经济性上也有利,除此之外,还能够提高设计自由度。另外,即使产生被检测体破损、脱落等故障,也能够迅速地进行辨别。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1