一种空间车位识别方法、系统及汽车与流程
本发明涉及空间车位识别,特别是涉及一种空间车位识别方法、系统及汽车。
背景技术:
1、随着近年来自动驾驶技术的进步和全球高速城市化进程的不断加速,车辆智能化系统已成为提高日常生活便捷性和效率的重要软件配套设施。其中,自动泊车辅助系统更是车辆智能系统中汽车主动避碰领域在低速复杂城市环境中的重要应用,是近年来的研究热点。车位检测是自动泊车辅助系统的一个重要环节,通过对传感器(如摄像头、超声波雷达、激光雷达等等)测量的车位信息进行分析推演,可以实现可用车位的实时检测功能。相比之下,停车场的建设已经相对速度慢,停车困难的问题也日益突出。研究对车位的检测方法不仅可以有效的提高车位的利用率,缓解了车位资源有限的问题的同时,还可以同时有效满足停车场在效率、安全、管理各个方面的要求。
2、目前,车位的检测方法有很多,根据工作原理可以大致分为场地与车辆多传感器协作以及单个车辆传感器的方法。但是,对于多传感器协作,需要的昂贵的环境感知基础设施的建设费用以及其支持配套的完整融合算法极大地限制了该方法的应用场景;此外,多传感器的紧耦合融合仍然是一个挑战性的问题,尚未得到很好的解决。而对于单个传感器,多是采用超声波以及激光雷达,不受近距离照明条件的影响。数据处理是直接的,因此是快速的,通常是实时的速度。因此,在大多数场景下,它在测量距离和精度方面都能满足停车测量的要求,但也存在一些缺点,如超声波雷达会存在波束角度大、方向差、分辨率低、工作距离短等缺点;而激光雷达工作受天气和大气影响大,在雨天以及雾天时候衰减急剧加大,传播距离大受影响。
技术实现思路
1、本发明的目的在于,提出一种空间车位识别方法、系统及汽车,实现在地下停车场的车位紧张场景的情况下,实现对于悬空障碍物的准确判断,进而达到对于三维可用空间车位的大范围检索以及可用车位的高精度信息输出功能。
2、一方面,提供一种空间车位识别方法,包括:
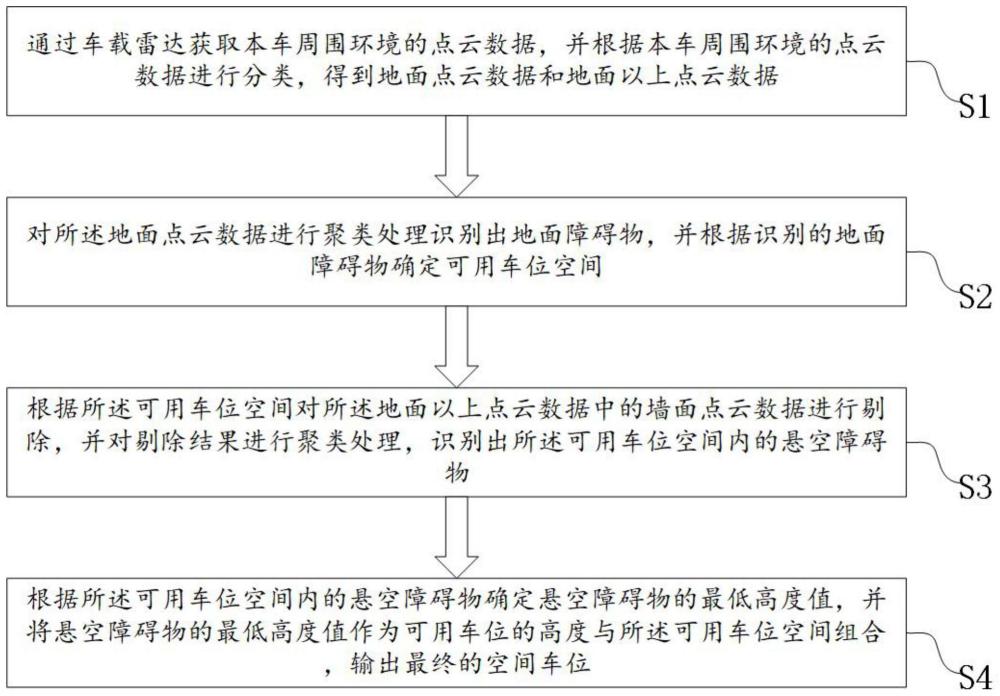
3、通过车载雷达获取本车周围环境的点云数据,并根据本车周围环境的点云数据进行分类,得到地面点云数据和地面以上点云数据;
4、对所述地面点云数据进行聚类处理识别出地面障碍物,并根据识别的地面障碍物确定可用车位空间;
5、根据所述可用车位空间对所述地面以上点云数据中的墙面点云数据进行剔除,并对剔除结果进行聚类处理,识别出所述可用车位空间内的悬空障碍物;
6、根据所述可用车位空间内的悬空障碍物确定悬空障碍物的最低高度值,并将悬空障碍物的最低高度值作为可用车位的高度与所述可用车位空间组合,输出最终的空间车位。
7、优选地,所述对点云数据进行分类,具体包括:
8、通过预设的点识别规则识别所述点云数据中的地面点,将所述地面点所在的平面作为地平面;
9、通过预设的变换矩阵对所述地平面进行校准,得出地面点云数据;
10、将所述地面点云数据除外的点云数据输出为地面以上点云数据。
11、优选地,所述对所述地面点云数据进行聚类处理识别出地面障碍物,具体包括:
12、识别所述地面点云数据中的目标障碍物的点云信息,并根据预设的标准将所述目标障碍物的点云信息进行分段,得到分段结果;
13、根据预设的聚类点簇的所需最小数目和所需最大数目对所述分段结果中每个分段进行聚类,将对应的聚类处理结果输出为地面障碍物。
14、优选地,所述根据识别的地面障碍物确定可用车位空间,具体包括:
15、根据地面障碍物的范围判断目标车位的停车空间是否满足预设的泊车标准;
16、若目标车位的停车空间满足预设的泊车标准,则判定该车位为可用车位空间;
17、若目标车位的停车空间不满足预设的泊车标准,则判定该车位为不可用车位空间。
18、优选地,所述判断目标车位的停车空间是否满足预设的泊车标准,具体包括:
19、当目标车位相对于本车的行使方向为垂直或斜列车位时,将相邻两车距行车侧最近的两点在本车行使方向的投影距离与本车车宽加预设的缓冲距离之和比较,若相邻两车距行车侧最近的两点在本车行使方向的投影距离大于本车车宽加预设的缓冲距离之和,则判定满足预设的泊车标准;
20、当目标车位相对于本车的行使方向为水平车位,将相邻两车距行车侧最近的两点在本车的行使方向上的投影距离与本车车长加预设的缓冲距离之和比较,若相邻两车距行车侧最近的两点在本车的行使方向上的投影距离大于本车车长加预设的缓冲距离之和,则判定满足预设的泊车标准。
21、优选地,所述根据所述可用车位空间对所述地面以上点云数据中的墙面点云数据进行剔除,具体包括:
22、从所述地面以上点云数据中识别贴合墙面的点云数据,并从其中随机采样多个点云;
23、通过预设的平面模型对采样的点云进行拟合,得到拟合结果;
24、计算其他点云到拟合结果的距离,若某一点云到拟合结果的距离小于预设的距离阈值,则判定该点云为内点,并统计所有内点的数量;
25、根据预设的迭代次数重复多次,选择内点数最多的拟合结果;
26、计算每个拟合结果中内点数量占拟合结果点云数量的比值,并将所述比值与预设的滤除阈值比较,滤除大于所述预设的滤除阈值的所述比值。
27、优选地,所述识别出所述可用车位空间内的悬空障碍物,具体包括:
28、检测可用车位空间的垂直方向上是否存在点云信息,若存在点云信息,则判定存在的点云信息为贴合在墙面上的悬空障碍物,并对其进行聚类处理,输出悬空障碍物。
29、优选地,还包括:
30、若不存在点云信息,则直接输出雷达辐射可达的最高高度信息,并将所述雷达辐射可达的最高高度信息作为可用车位的高度与所述可用车位空间组合,输出最终的空间车位。
31、另一方面,还提供一种空间车位识别系统,用以实现所述的空间车位识别方法,包括:
32、点云数据获取模块,用以通过车载雷达获取本车周围环境的点云数据,并根据本车周围环境的点云数据进行分类,得到地面点云数据和地面以上点云数据;
33、障碍物识别模块,用以对所述地面点云数据进行聚类处理识别出地面障碍物,并根据识别的地面障碍物确定可用车位空间;根据所述可用车位空间对所述地面以上点云数据中的墙面点云数据进行剔除,并对剔除结果进行聚类处理,识别出所述可用车位空间内的悬空障碍物
34、空间车位计算模块,用以根据所述可用车位空间内的悬空障碍物确定悬空障碍物的最低高度值,并将悬空障碍物的最低高度值作为可用车位的高度与所述可用车位空间组合,输出最终的空间车位。
35、另一方面,还提供一种汽车,通过所述的空间车位识别系统对车辆的空间车位进行识别。
36、综上,实施本发明的实施例,具有如下的有益效果:
37、本发明提供的空间车位识别方法、系统及汽车,在地下停车场的车位紧张场景的情况下,实现对于悬空障碍物(尤其是悬空障碍物贴墙面的情况)的准确判断,对于空间有效的三维车位信息的输出,输出的车位高度信息能够给予驾驶系统或者驾驶者在泊车场景下车位是否真实可用重要的高度信息参考,能够极大地提高车位利用率的同时,改善二维车位输出下的车位误判情况。进而达到对于三维可用空间车位的大范围检索以及可用车位的高精度信息输出功能。
- 还没有人留言评论。精彩留言会获得点赞!