一种AGV小车支撑调平底座的制作方法
一种agv小车支撑调平底座
技术领域
1.本发明涉及建筑机器人技术领域,尤其是涉及一种agv小车支撑调平底座。
背景技术:
2.随着科技的发展和劳动力成本的日益增长,传统建筑行业登高作业繁琐,效率低,存在安全隐患,因此,采用机器人代替传统人工作业也越来越成为主流趋向。其中,agv底盘机器人一般用于建筑行业的墙面、顶面自动装修,包括墙面、顶面刮腻子、喷涂、打磨等,机器人在进行墙面作业时,需要保证升降机构每一次作业均垂直于地面,使得每一次升降作业面平行,但由于地面并不非完全平整,若机器人不能调平,就不能保证每一次施工作业面是平行的,每一次施工后就存在施工接驳区域交叉的现象,有的地方重叠过多,而有的地方没有接驳到,极大地影响到施工的质量;另外,机器人升的越高,倾覆的风险也越大。若设计一款支撑腿用于支撑和调平,其发生倾覆的风险将大大降低,施工质量也能得到保障。
技术实现要素:
3.本发明的目的在于提供一种agv小车支撑调平底座,以解决现有技术中agv小车底盘不能自动实现调平的技术问题。
4.本发明提供一种agv小车支撑调平底座,包括agv底座,所述agv底座四个拐角处均可张开式固定有支撑腿,所述agv底座顶部设置有角度传感器,所述支撑腿通过固定座与agv底座侧面栓接固定,所述支撑腿包括旋转结构和升降结构,所述旋转结构相对固定座转动连接,所述升降结构的底部与地面可升降式相抵,所述角度传感器检测agv小车相对世界坐标轴的倾斜角度,并通过编码器控制旋转结构和升降结构对agv底座进行调平。
5.进一步,所述旋转结构包括嵌套于固定座表面孔洞内的固定旋转轴并与固定座锁紧固定,所述固定旋转轴顶部固定有固定齿轮,所述固定齿轮的一侧设置有旋转齿轮,且旋转齿轮与固定齿轮啮合,所述旋转齿轮通过旋转步进电机驱动,所述旋转步进电机安装固定于第一电机安装板底部。
6.进一步,所述固定座与固定旋转轴的连接处嵌套有旋转铰接座,所述旋转铰接座的内孔嵌设有圆锥滚子轴承和隔套,所述固定旋转轴的底端通过锁紧螺母嵌套固定,所述旋转铰接座的一侧通过横向连接板与升降结构栓接固定。一对圆锥滚子轴承和一个隔套,对旋转铰接座与固定旋转轴进行固定,防止二者之间打滑,保证支撑腿旋转的精度。
7.进一步,所述旋转步进电机的输出端嵌套有轴套,且轴套嵌设于旋转齿轮内。旋转步进电机通过轴套驱动旋转齿轮,防止二者打滑的同时,还便于拆卸与维修。
8.进一步,所述固定座远离agv底座的一侧对称嵌设有限位减震块。4个限位减震块安装在固定座侧面,支撑腿在0-180
°
的旋转中,限位减震块对固定座进行限位和缓冲。
9.进一步,所述横向连接板远离旋转铰接座的一端栓接固定有导轨安装板,所述导轨安装板位于横向连接板的一侧固定有直线导轨,所述直线导轨的表面滑动连接有滑块,所述滑块侧面固定有丝杠螺母固定座,沿所述丝杠螺母固定座竖直方向,在丝杠螺母固定
座内固定有丝杠螺母,所述丝杠螺母中心处嵌套有滚珠丝杠,且滚珠丝杠与丝杠螺母螺纹连接,所述丝杠螺母固定座的底部固定有脚杯,且脚杯与地面相抵,所述滚珠丝杠的顶端嵌套固定有从动端同步带轮,所述从动端同步带轮通过同步带与主动端同步带轮传动,所述主动端同步带轮通过升降步进电机驱动,且升降步进电机与横向连接板通过第二电机安装板固定。通过升降步进电机、主动端同步带轮、从动端同步带轮和同步带的驱动,滚珠丝杠转动,并经由丝杠螺母将滚珠丝杠的旋转运动转化为直线运动,使得丝杠螺母固定座沿着直线导轨滑动,直至和丝杠螺母固定座固定的脚杯和地面进行升落,调整agv底座4个方向上的高度,从而对agv底座进行调平。
10.进一步,所述丝杠螺母固定座的背面固定有光电开关感应片,所述光电开关感应片的正上方设置有槽型光电开关,且槽型光电开关与横向连接板固定。光电开关感应片随着丝杠螺母固定座的升落而随之升落,槽型光电开关对支撑腿的脚杯的位置进行检测,并协同角度传感器的角度数据,从而便于对agv底座进行水平度的精度调节。
11.进一步,所述滚珠丝杠嵌设于丝杠固定座内,并通过丝杠固定座限位,所述丝杠固定座安装固定于丝杠安装座内,且丝杠安装座与横向连接板安装固定,两根所述横向连接板之间通过张紧座张紧固定。滚珠丝杠可通过丝杠固定座和丝杠安装座进行限位与固定,防止滚珠丝杠错位,同时,两根横向连接板通过张紧座可调,便于和各组件的紧密固定。
12.进一步,所述导轨安装板的底端固定有滑块限位块。通过导轨安装板底部的滑块限位块,可对脚杯的极限位置进行限位,防止升降步进电机过度升起,损坏用于升降的传动组件。
13.进一步,所述支撑腿表面可拆卸地安装固定有防护外壳。防护外壳可对支撑腿进行保护,防止作业中损坏其中的传动组件。
14.与现有技术相比较,本发明的有益效果在于:
15.其一,现有技术中,机器人在进行墙面作业时,需要保证升降机构每一次作业均垂直于地面,使得每一次升降作业面平行,但由于地面并不非完全平整,若机器人不能调平,就不能保证每一次施工作业面是平行的,每一次施工后就存在施工接驳区域交叉的现象,有的地方重叠过多,而有的地方没有接驳到,极大地影响到施工的质量,另外,机器人升的越高,倾覆的风险也越大,针对此类问题,本发明设计了一款agv小车的支撑调平底座,四个支撑腿安装固定于agv底座的四个拐角处,四个支撑腿都可自由张开和关闭,其中,旋转齿轮、轴套、电机安装板、旋转铰接座、旋转步进电机、横向连接板整体都可沿固定旋转轴转动,通过旋转步进电机及旋转齿轮、固定齿轮的驱动,从而实现支撑腿的打开和关闭,支撑腿张开至合适角度后,升降步进电机驱动主动端同步带轮,带动从动端同步带轮和滚珠丝杠转动,丝杠螺母将滚珠丝杠的旋转运动转化为直线运动,使得丝杠螺母固定座沿着直线导轨做升降运动,脚杯随着做升降运动,根据角度传感器感应agv底座与世界坐标轴的夹角,判断agv底盘是否水平,从而调整每个支撑腿的脚杯和地面相贴,从而调整agv底盘的水平,从而在不同的地面的平整度下,以及不同的高度下,均能保证agv小车的平稳作业。
16.其二,本发明中,4个限位减震块安装在固定座侧面,支撑腿在0-180
°
的旋转中,限位减震块对固定座进行限位和缓冲。
17.其三,本发明中,光电开关感应片随着丝杠螺母固定座的升落而随之升落,槽型光电开关对支撑腿的脚杯的位置进行检测,并协同角度传感器的角度数据,从而便于对agv底
座进行水平度的精度调节。
附图说明
18.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
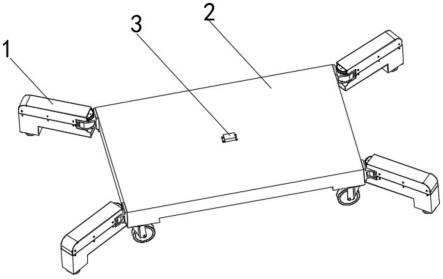
19.图1为本发明的整体结构示意图;
20.图2为本发明中四个支撑腿关闭后的结构示意图;
21.图3为本发明中四个支撑腿135
°
展开后的结构示意图;
22.图4为本发明中支撑腿的结构示意图;
23.图5为本发明中支撑腿的内部结构示意图;
24.图6为本发明中支撑腿的内部结构的俯视图;
25.图7为本发明中支撑腿的内部结构的剖视图;
26.图8为本发明中支撑腿的爆炸图;
27.图9为本发明中支撑腿在初始位置的结构示意图;
28.图10为本发明中支撑腿下降至最低位置的结构示意图。
29.附图标记:
30.1、支撑腿;2、agv底座;3、角度传感器;4、防护外壳;5、固定座;6、旋转结构;601、固定齿轮;602、旋转齿轮;603、轴套;604、电机安装板;605、限位减震块;606、固定旋转轴;607、圆锥滚子轴承;608、隔套;609、锁紧螺母;610、旋转铰接座;611、旋转步进电机;7、横向连接板;8、升降结构;801、主动端同步带轮;802、电机安装板;803、张紧座;804、同步带;805、从动端同步带轮;806、滑块;807、导轨安装板;808、直线导轨;809、升降步进电机;810、槽型光电开关;811、丝杠固定座;812、丝杠安装座;813、光电开关感应片;814、丝杠螺母;815、丝杠螺母固定座;816、滚珠丝杠;817、脚杯;818、滑块限位块。
具体实施方式
31.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
32.通常在此处附图中描述和显示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。
33.基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.下面结合图1至图10所示,本发明实施例提供了一种agv小车支撑调平底座,包括agv底座2,agv底座2四个拐角处均可张开式固定有支撑腿1,支撑腿1表面可拆卸地安装固定有防护外壳4,防护外壳4可对支撑腿1进行保护,防止作业中损坏其中的传动组件,agv底座2顶部设置有角度传感器3,支撑腿1通过固定座5与agv底座2侧面栓接固定,支撑腿1包括旋转结构6和升降结构8,旋转结构6相对固定座5转动连接,升降结构8的底部与地面可升降
式相抵,角度传感器3检测agv小车相对世界坐标轴的倾斜角度,并通过编码器控制旋转结构6和升降结构8对agv底座2进行调平。现有技术中,机器人在进行墙面作业时,需要保证升降机构每一次作业均垂直于地面,使得每一次升降作业面平行,但由于地面并不非完全平整,若机器人不能调平,就不能保证每一次施工作业面是平行的,每一次施工后就存在施工接驳区域交叉的现象,有的地方重叠过多,而有的地方没有接驳到,极大地影响到施工的质量,另外,机器人升的越高,倾覆的风险也越大,针对此类问题,本发明设计了一款agv小车的支撑调平底座,四个支撑腿1安装固定于agv底座2的四个拐角处,四个支撑腿1都可自由张开和关闭,其中,旋转齿轮602、轴套603、电机安装板、旋转铰接座610、旋转步进电机611、横向连接板7整体都可沿固定旋转轴606转动,通过旋转步进电机611及旋转齿轮602、固定齿轮601的驱动,从而实现支撑腿1的打开和关闭,支撑腿1张开至合适角度后,升降步进电机809驱动主动端同步带轮801,带动从动端同步带轮805和滚珠丝杠816转动,丝杠螺母814将滚珠丝杠816的旋转运动转化为直线运动,使得丝杠螺母固定座815沿着直线导轨808做升降运动,脚杯817随着做升降运动,根据角度传感器3感应agv底座2与世界坐标轴的夹角,判断agv底盘是否水平,从而调整每个支撑腿1的脚杯817和地面相贴,从而调整agv底盘的水平,从而在不同的地面的平整度下,以及不同的高度下,均能保证agv小车的平稳作业。
35.在另一个实施例中,旋转结构6包括嵌套于固定座5表面孔洞内的固定旋转轴606并与固定座5锁紧固定,固定旋转轴606顶部固定有固定齿轮601,固定齿轮601的一侧设置有旋转齿轮602,且旋转齿轮602与固定齿轮601啮合,旋转齿轮602通过旋转步进电机611驱动,旋转步进电机611安装固定于第一电机安装板604底部;固定座5与固定旋转轴606的连接处嵌套有旋转铰接座610,旋转铰接座610的内孔嵌设有圆锥滚子轴承607和隔套608,固定旋转轴606的底端通过锁紧螺母609嵌套固定,旋转铰接座610的一侧通过横向连接板7与升降结构8栓接固定,一对圆锥滚子轴承607和一个隔套608,对旋转铰接座610与固定旋转轴606进行固定,防止二者之间打滑,保证支撑腿1旋转的精度;旋转步进电机611的输出端嵌套有轴套603,且轴套603嵌设于旋转齿轮602内,旋转步进电机611通过轴套603驱动旋转齿轮602,防止二者打滑的同时,还便于拆卸与维修。
36.在另一个实施例中,固定座5远离agv底座2的一侧对称嵌设有限位减震块605,4个限位减震块605安装在固定座5侧面,支撑腿1在0-180
°
的旋转中,限位减震块605对固定座5进行限位和缓冲。
37.在另一个实施例中,横向连接板7远离旋转铰接座610的一端栓接固定有导轨安装板807,导轨安装板807位于横向连接板7的一侧固定有直线导轨808,直线导轨808的表面滑动连接有滑块806,滑块806侧面固定有丝杠螺母固定座815,沿丝杠螺母固定座815竖直方向,在丝杠螺母固定座815内固定有丝杠螺母814,丝杠螺母814中心处嵌套有滚珠丝杠816,且滚珠丝杠816与丝杠螺母814螺纹连接,丝杠螺母固定座815的底部固定有脚杯817,且脚杯817与地面相抵,滚珠丝杠816的顶端嵌套固定有从动端同步带轮805,从动端同步带轮805通过同步带804与主动端同步带轮801传动,主动端同步带轮801通过升降步进电机809驱动,且升降步进电机809与横向连接板7通过第二电机安装板802固定,通过升降步进电机809、主动端同步带轮801、从动端同步带轮805和同步带804的驱动,滚珠丝杠816转动,并经由丝杠螺母814将滚珠丝杠816的旋转运动转化为直线运动,使得丝杠螺母固定座815沿着直线导轨808滑动,直至和丝杠螺母固定座815固定的脚杯817和地面进行升落,调整agv底
座24个方向上的高度,从而对agv底座2进行调平;丝杠螺母固定座815的背面固定有光电开关感应片813,光电开关感应片813的正上方设置有槽型光电开关810,且槽型光电开关810与横向连接板7固定,光电开关感应片813随着丝杠螺母固定座815的升落而随之升落,槽型光电开关810对支撑腿1的脚杯817的位置进行检测,并协同角度传感器3的角度数据,从而便于对agv底座2进行水平度的精度调节;滚珠丝杠816嵌设于丝杠固定座811内,并通过丝杠固定座811限位,丝杠固定座811安装固定于丝杠安装座812内,且丝杠安装座812与横向连接板7安装固定,两根横向连接板7之间通过张紧座803张紧固定,滚珠丝杠816可通过丝杠固定座811和丝杠安装座812进行限位与固定,防止滚珠丝杠816错位,同时,两根横向连接板7通过张紧座803可调,便于和各组件的紧密固定;导轨安装板807的底端固定有滑块限位块818,通过导轨安装板807底部的滑块限位块818,可对脚杯817的极限位置进行限位,防止升降步进电机809过度升起,损坏用于升降的传动组件。
38.本实施例的工作原理为:本产品进行用于建筑业的作业时,将agv底座2置于施工场地,其中,旋转齿轮602、轴套603、电机安装板、旋转铰接座610、旋转步进电机611、横向连接板7整体可沿固定旋转轴606转动,当支撑腿1需要展开时,旋转步进电机611旋转带动旋转齿轮602旋转,旋转齿轮602绕固定齿轮601转动,从而完成展开动作;随后支撑腿1进行升降步骤,升降步进电机809的输出轴跟主动端同步带轮801连接,升降步进电机809输出的旋转运动通过主动端同步带轮801、同步带804、从动端同步带轮805带动滚珠丝杠816旋转,丝杠螺母814将滚珠丝杠816的旋转运动转化为直线运动,滑块806、光电开关感应片813、丝杠螺母814、脚杯817全部安装在丝杠螺母固定座815上面,因此,丝杠螺母814的直线运动将带动脚杯817的上下直线运动,槽型光电开关810可用于检测脚杯817的初始位置,通过角度传感器3的反馈和电脑计算,就能准确的给每一个支撑腿1发送下降的具体位置信息,从而达到agv底座2的调平目的。
39.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1