一种域集中式汽车电子电气系统的制作方法
1.本发明涉及车辆控制领域,尤其涉及一种域集中式汽车电子电气系统。
背景技术:
2.在当下软件定义汽车和汽车智能化、网联化的发展趋势下,传统的基于电子控制单元(electronic control unit,ecu)的分布式电子电气架构(electrical electronic architecture,eea)逐渐暴露出更多的问题和面临诸多挑战。
技术实现要素:
3.为了解决上述问题,本发明提出了一种域集中式汽车电子电气系统。
4.具体方案如下:
5.一种域集中式汽车电子电气系统,包括:整车控制域控制器、自动驾驶域控制器和智能座舱域控制器,每个域控制器不仅是运算单元,还具备网关的协议转换功能,三个域控制器之间以以太网的方式通过中央网关进行互联通信;
6.自动驾驶域控制器与车辆上的各传感器进行通信连接,通过对接收到的各传感器的信息进行融合后,生成对整车控制域控制器的控制指令,并发送至整车控制域控制器;
7.整车控制域控制器集成了动力域、底盘域和车身电子域的所有功能,在接收到自动驾驶域控制器发送的控制指令后,对智能系统的指令进行安全等级预测,对指令数据进行安全限值,然后结合智能线控底盘的驱动、制动、转向模块进行协调控制;
8.智能座舱域控制器与多个子功能模块通过以太网进行通信连接,用于集成多个子功能模块的功能。
9.进一步的,各个域控制器内部网络根据信息量需求采用以太网、canfd、can和lin中的一种或多种组合方式进行信息传递。
10.进一步的,自动驾驶域控制器中包括辅助驾驶模块和自动驾驶模块。
11.进一步的,系统还包括云端服务器和车载t-box,系统通过中央网关—车载t-box—云端服务器进行车辆信息存储及远程车辆控制,其中,中央网关与车载t-box之间通过以太网的方式进行通信,车载t-box与云端服务器之间采用5g通信技术进行通信。
12.进一步的,整车控制域控制器具有6路can通讯,其中,can1用于与动力域中各模块进行通讯、can2~can5用于与底盘域中各模块进行通讯、can6用于与车身电子域中各模块进行通讯。
13.进一步的,动力域中的模块包括:电池管理模块、充电模块、整车热管理模块、高压配电模块和dc/ac电附件模块。
14.进一步的,底盘域中的模块包括:分布式驱动系统电子差速控制、全轮独立转向系统线控转向控制、全轮独立制动系统线控制动、制动稳定性及防抱死制动控制、横纵向的动力学协调控制及冗余安全控制。
15.进一步的,车身电子域中的模块包括上车身模块和下车身模块;下车身模块负责
底盘系统的电器控制,上车身模块负责上层车体的电器控制;上车身模块与下车身模块的内部通讯网络相互独立。
16.本发明采用如上技术方案,将多个分散的小传感器集成为功能更强的单个传感器,将多个分散的ecu按照功能域划分,集成到一个运算能力更强大的域控制器(domain control unit,dcu)中,从而实现能够兼容中央驱动和分布式驱动构型汽车的域集中式汽车电子电气系统。
附图说明
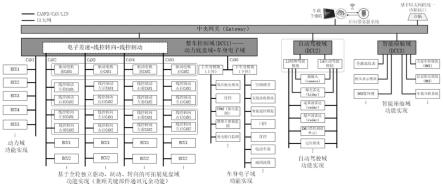
17.图1所示为本发明实施例中系统的结构示意图。
具体实施方式
18.为进一步说明各实施例,本发明提供有附图。这些附图为本发明揭露内容的一部分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理。配合参考这些内容,本领域普通技术人员应能理解其他可能的实施方式以及本发明的优点。
19.现结合附图和具体实施方式对本发明进一步说明。
20.实施例一:
21.本发明实施例提供了一种域集中式汽车电子电气系统,如图1所示,所述系统包括:整车控制域控制器、自动驾驶域控制器和智能座舱域控制器,每个域控制器不仅是运算单元,还具备网关的协议转换功能,三个域控制器之间以以太网的方式通过中央网关进行互联通信。
22.各个域控制器内部网络则根据信息量需求采用以太网、canfd、can、lin等一种或多种组合方式进行信息传递。
23.(1)自动驾驶域
24.自动驾驶域属于车辆的上层系统,主要负责多传感器(如雷达、摄像头等)的信息融合处理、车辆定位、路径规划以及决策控制。通过感知、规划、决策算法,从而输出针对整车控制域的控制指令,并通过整车控制域实现对车辆的横、纵向控制。
25.本实施例中设定自动驾驶域控制器中包括l3级高级辅助驾驶模块和l4级及以上自动驾驶模块。为了提升传感器设备的利用效率,辅助驾驶模块和自动驾驶模块共用一套感知系统,且对处理后的传感器信号进行资源共享。
26.(2)整车控制域
27.整车控制域作为本实施例的重要部分,其与动力域、底盘域和车身电子域中各模块进行通信连接,融合了动力域、底盘域和车身电子域的所有功能,能够实现针对全线控智能滑板底盘的独立控制,从而实现真正意义上的移动底盘。整车控制域控制器在接收到自动驾驶域控制器发送的控制指令后,对控制指令对应的动力域、底盘域或车身电子域中的对应模块进行控制。
28.如图1所以,整车控制域控制器具有6路can通讯,其中,其中,can1用于与动力域中各模块进行通讯、can2~can5用于与底盘域中各模块进行通讯、can6用于与车身电子域中各模块进行通讯。
29.本实施例中设定动力域中的模块包括:电池管理模块、充电模块、整车热管理模块
(电池、电机、电附件的集成化一体式热管理方案)、高压配电模块和dc/ac电附件模块。本领域技术人员可以根据实际需求对动力域中包含的模块进行增减,在此不做限定。
30.底盘域中的各模块用于对整个线控底盘的动力学控制,本实施例中设定底盘域中的模块包括:分布式驱动系统电子差速控制、全轮独立转向系统线控转向控制、全轮独立制动系统线控制动、制动稳定性及防抱死制动控制、横纵向的动力学协调控制及冗余安全控制。通过横纵向的协调控制实现车辆安全性、稳定性、操控性、经济性的提升,并且通过协调控制实现电机制动力及差速控制对转向控制、制动控制的冗余。此外还通过通讯冗余(如图1中can2、can3、can4、can5)、电源冗余、控制冗余等实现冗余安全的控制。本领域技术人员可以根据实际需求对动力域中包含的模块进行增减,在此不做限定。
31.车身电子域中的各模块用于车身控制,本实施例中设定车身电子域中的模块包括上车身模块和下车身模块;下车身模块负责底盘系统的电器控制,上车身模块负责上层车体的电器控制。通过上下分离的模块化车身控制,可以实现上下车身的快速拆分功能。如图1中,上车身模块包括:低压配电模块、灯控模块、胎压监测模块、摩擦片磨损监测模块、充电舱门监测模块等;下车身模块包括:空调调节模块、无线接收模块、智能遥控钥匙模块、门控模块、灯控模块、电动车窗模块、雨刮洗涤模块等。上车身模块和下车身模块通过同一路通讯网络(can6)与整车控制域控制器进行信息交互,而上车身模块与下车身模块内部通讯网络则相互独立。
32.(3)智能座舱域
33.智能座舱域控制器与多个车辆子功能模块通过以太网进行通信连接,用于集成多个子功能模块的功能,同时保证数据传输的低延迟与大流量。本实施例中车辆子功能模块包括:全液晶仪表显示系统、抬头显示模块、360度环视、大屏中控模块、信息娱乐模块、车载互联系统等,负责影音娱乐、信息显示、车载互联等。本领域技术人员可以根据实际需求对与智能座舱域控制器连接的子功能模块进行增减,在此不做限定。
34.进一步的,系统还包括云端服务器和车载t-box,系统通过中央网关—车载t-box—云端服务器进行车辆信息存储及远程车辆控制。中央网关与车载t-box之间采用以太网的方式进行信息传递,而t-box与云端服务器则采用5g通信技术,减小信息传递的时延,增强实时性。云端服务不仅包括车辆状态信息的实时监控,还包括远程控制和远程升级功能,通过云端服务器可以将控制指令下发到任一车辆行动执行机构,并且可以对任一子系统进行程序远程升级,在以太网通讯方式和5g通信技术的加持下,能极大地提升车辆信息传递的实时性。此外,在故障诊断方面采用基于以太网的统一诊断接口进行报文解析、故障诊断和任意子系统的程序更新。
35.本实施例系统不仅适用于中央驱动的新能源车型,同样适用于分布式驱动新能源汽车,尤其针对全线控分布式驱动电动汽车具有很强的适用性。
36.本发明实施例为基于当下汽车的发展方向,提出的一种全新的域集中式汽车电子电气系统,在通讯方式和通信技术上充分利用了软件定义汽车的特点,低延时的通信质量、一键远程升级程序的便利、统一化标准化的故障诊断接口等,切合了当下智能汽车的发展趋势。
37.尽管结合优选实施方案具体展示和介绍了本发明,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本发明的精神和范围内,在形式上和细节上可以对
本发明做出各种变化,均为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1