一种有自动回收功能的车载无人机作业装置的制作方法
1.本发明涉及无人机领域,尤其是涉及一种有自动回收功能的车载无人机作业装置。
背景技术:
2.无人机是利用无线电遥控设备、通过程序控制操纵的不载人飞机,它具有体积小、造价低、使用方便的优点,使无人机与车辆相互配合,即无人机由车载计算机自主进行控制,能够广泛应用于如风电、水利、林业等领域的安全巡检以及无人值守的工作。
3.如专利公告号为cn207535770u的专利无车载无人机舱,包括在车辆的上设置的用于回收无人机的舱体,舱体上设置有舱盖,舱体的底部设置能够滑出舱体的滑动托盘,使无人机降落在滑动托盘上,再使滑动托盘滑入舱体内,以进行无人机的回收。
4.针对上述的相关技术,发明人认为存在有以下缺陷,只能对单个无人机进行回收,而在户外的安全巡检工作中,需要使用多台无人机同时作业或是使用备用机进行协同工作,这时需要在车辆上设置多个舱体,现有技术中的舱体不利于无人机的统一管理和收纳。
技术实现要素:
5.为了能够同时对多台无人机进行收纳,本技术提供一种有自动回收功能的车载无人机作业装置。
6.本技术提供的一种有自动回收功能的车载无人机作业装置采用如下的技术方案:一种有自动回收功能的车载无人机作业装置,包括设置在车辆上的箱体,所述箱体内设置有腔室以及与腔室连通的悬停口,所述悬停口与车辆外部连通以供无人机进入箱体,所述箱体内设置有停放装置,所述停放装置包括竖直设置的支撑杆以及多个用于停放无人机的停放台,所述支撑杆固定设置在箱体内,所述停放台在支撑杆上排列设置且与支撑杆转动连接。
7.通过采用上述技术方案,前一台无人机自悬停口进入箱体内停放在停放台上后,该停放台转动移开,后一辆无人机可以停放在下一个停放台上,以达到同时收纳多台无人机的目的,便于在户外的安全巡检工作中,使用多台无人机同时作业或是使用备用机进行协同工作,有利于无人机的统一管理和收纳。
8.优选的,所述停放台上设置有置物台,所述置物台上设置有多个用于固定无人机在停放台的固定板以及用于驱动固定板移动的驱动组件。
9.通过采用上述技术方案,固定板移动对无人机进行固定,以减少在停放台转动时,出现无人机自停放台上移动的现象,进而减少出现无人机自停放台上掉落的现象出现。
10.优选的,所述固定板设置为四个,四个所述固定板两两相对设置,相对的所述固定板之间平行间隔设置,相邻的所述固定板之间垂直设置,所述箱体内设置有充电头以及用于使充电头移动与无人机充电口插接的第一推动件。
11.通过采用上述技术方案,固定板同步向置物台的中心方向移动直至四个固定板均
与无人机的支脚抵接,此过程固定板能够推着无人机的支脚使无人机在置物台上移动,以对无人机在置物台上的位置进行调整后,再对无人机进行固定,以便于充电头移动与无人机充电口插接。
12.优选的,所述置物台上设置有限位槽,所述固定板上设置有限位块,所述限位块滑动配合在限位槽内。
13.通过采用上述技术方案,限位块能够在限位槽内滑动,以达到使固定板与置物台滑动连接的目的。
14.优选的,所述驱动组件包括齿盘以及驱动齿盘转动的第三驱动件,所述齿盘转动设置在置物台上,所述齿盘上设有平面螺纹,所述限位块上设置有与平面螺纹啮合的齿牙。
15.通过采用上述技术方案,齿盘转动能够使限位块移动,齿盘正向转动使固定板同步向置物台中心方向移动,齿盘反向移动使固定板同步远离置物台中心方向移动。
16.优选的,所述支撑杆上固定设置有第一齿轮,所述支撑杆上设置有用于驱动停放台转动的转动组件,所述转动组件包括第二齿轮以及驱动第二齿轮转动的转动件,所述转动件与停放台固定,所述第一齿轮与第二齿轮啮合。
17.通过采用上述技术方案,转动件驱动第二齿轮转动,能够使第二齿轮绕第一齿轮的圆周放置移动,进而驱动停放台绕支撑杆的轴线转动。
18.优选的,所述箱体内还设置有夹持装置和用于驱动夹持装置升降的升降装置,所述夹持装置与升降装置固定连接,所述夹持装置包括安装杆、夹持杆、与安装杆转动连接的驱动杆以及用于使驱动杆转动的第一驱动件,所述夹持杆设置为至少两个,所述驱动杆上设置有螺纹方向相反的第一螺纹部和第二螺纹部,所述夹持杆分别与驱动杆上的第一螺纹部和第二螺纹部螺纹连接。
19.通过采用上述技术方案,第一驱动件使驱动杆转动,驱动杆正向转动,两个夹持杆相对移动以对无人机进行夹持,驱动杆反向转动,两个夹持杆相背移动以松开无人机。
20.优选的,所述安装杆与箱体侧壁滑动连接,所述升降装置包括链条、至少两个链轮以及用于驱动链轮转动的第二驱动件,所述链轮转动设置在箱体的内壁上,所述链条套设在链轮上且与链轮啮合。
21.通过采用上述技术方案,第二驱动件驱动链轮转动,链轮转动带动链条移动,以驱动安装杆在箱体上移动。
附图说明
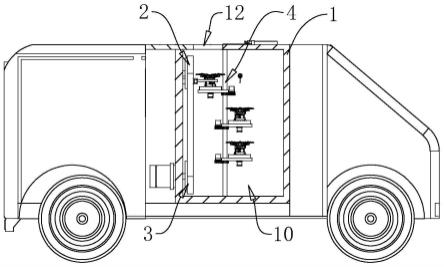
22.图1是本技术实施例一种有自动回收功能的车载无人机作业装置的剖视图。
23.图2是本技术实施例一种有自动回收功能的车载无人机作业装置中升降装置以及夹持装置的结构示意图。
24.图3是本技术实施例一种有自动回收功能的车载无人机作业装置中夹持装置的结构示意图。
25.图4是本技术实施例一种有自动回收功能的车载无人机作业装置中停放装置的结构示意图。
26.图5是本技术实施例一种有自动回收功能的车载无人机作业装置中置物台的结构示意图。
27.图6是本技术实施例一种有自动回收功能的车载无人机作业装置中置物台的剖面结构示意图。
28.图7是本技术实施例一种有自动回收功能的车载无人机作业装置中示出箱体内结构的剖视图。
29.图8是本技术实施例一种有自动回收功能的车载无人机作业装置中充电装置的结构示意图。
30.图9是本技术实施例一种有自动回收功能的车载无人机作业装置中密封盖的结构示意图。
31.附图标记:1、箱体;10、腔室;100、第一腔体;101、第二腔体;11、悬停口;12、滑槽;2、夹持装置;20、安装杆;200、安装槽;201、滑块;21、驱动杆;210、第一螺纹部;211、第二螺纹部;22、夹持杆;23、第一驱动件;3、升降装置;30、链条;31、链轮;32、第二驱动件;4、停放装置;40、支撑杆;400、第一齿轮;41、停放台;42、转动组件;420、转动件;421、第二齿轮;5、置物台;50、固定板;500、限位块;5000、齿牙;51、驱动组件;510、齿盘;5100、平面螺纹;511、第三驱动件;52、限位槽;6、充电装置;60、充电头;61、充电线;62、第一推动件;7、密封盖;70、第二推动件。
具体实施方式
32.以下结合附图1-9对本技术作进一步详细说明。
33.本技术实施例公开一种有自动回收功能的车载无人机作业装置,参照图1,包括设置在作业车辆车厢内的箱体1,箱体1设置有腔室10,在箱体1的顶部形成有用于供无人机通过的悬停口11,悬停口11与腔室10连通,悬停口11与车厢外部连通。腔室10内安装有夹持装置2、升降装置3以及停放装置4,夹持装置2安装在升降装置3上,夹持装置2用于将无人机运送至停放装置4处进行停放。
34.参照图2,夹持装置2包括安装杆20、驱动杆21、夹持杆22以及第一驱动件23,安装杆20上开设有安装槽200,安装槽200的设置为横截面为矩形的长槽,安装杆20设置为横截面为矩形的长杆,安装杆20的一端置于在安装槽200内,驱动杆21转动设置在安装槽200内且贯穿安装杆20设置,驱动杆21设置为双向螺杆,驱动杆21上设置有第一螺纹部210与第二螺纹部211,第一螺纹部210与第二螺纹部211的螺纹方向相反。夹持杆22设置为两根,两根夹持杆22分别螺纹连接在第一螺纹部210和第二螺纹部211上,第一驱动件23设置为电机,第一驱动件23与安装杆20,第一驱动件23的输出轴与驱动杆21同轴固定。第一驱动件23使驱动杆21转动,驱动杆21正向转动,两个夹持杆22相对移动,驱动杆21反向转动,两个夹持杆22相背移动。
35.参照图2和图3,安装杆20上设置有滑块201,箱体1的侧壁上开设有滑槽12,滑块201滑动配合在滑槽12内,安装杆20能够在箱体1侧壁上滑动。升降装置3包括链条30、链轮31以及第二驱动件32,链轮31设置为两个,链轮31转动设置在箱体1的内壁上,链条30套设在链轮31上且与链轮31啮合,第二驱动件32设置为电机,第二驱动件32的输出轴与链轮31同轴固定,安装杆20与链条30焊接。第二驱动件32驱动链轮31转动,链轮31转动带动链条30移动,以驱动安装杆20在箱体1上移动。
36.无人机机身的底部设置有支脚,使无人机悬停在悬停口11出,链条30带动夹持装
置2朝向悬停口11移动,直至夹持杆22置于支脚的两侧,移动夹持杆22使无人机的机身搭在夹持杆22上,且夹持杆22在支脚两侧固定支脚,链条30移动带动无人机在箱体1的竖直方向移动。
37.参照图4,停放装置4包括支撑杆40、停放台41以及驱动停放台41转动的转动组件42,停放台41转动设置在支撑杆40上,停放台41在支撑杆40上沿支撑杆40的高度方向间隔设置有多个,以用于同时停放多台无人机。支撑杆40上固定套设有第一齿轮400,停放台41的下表面与第一齿轮400抵接,转动组件42包括转动件420和第二齿轮421,转动件420设置为电机,转动件420固定在停放台41上,第二齿轮421同轴固定在转动件420的输出轴上,第一齿轮400与第二齿轮421啮合。转动件420驱动第二齿轮421转动,带动第一齿轮400转动,进而带动停放台41转动。
38.参照图5和图6,停放台41上设置有置物台5,置物台5上设置有固定板50以及驱动固定板50移动夹持的驱动组件51,固定板50设置为四个,固定板50两两相对设置,相对的固定板50之间平行间隔设置,相邻的固定板50之间垂直设置,置物台5的上表面设置有限位槽52,固定板50上设置有限位块500,限位块500滑动设置在限位槽52内。驱动组件51包括齿盘510和第三驱动件511,置物台5内设置有置物腔,齿盘510置于置物腔内,齿盘510与置物台5转动连接。齿盘510的上表面设置有平面螺纹5100,限位块500的下表面设置有与平面螺纹5100啮合的齿牙5000,齿盘510转动能够使限位块500移动,第三驱动件511设置为电机,第三驱动件511的输出轴穿过停放台41与置物台5与齿盘510固定,第三驱动件511固定在停放台41上,第三驱动件511驱动齿盘510转动,齿盘510正向转动使四个固定板50同步向置物台5中心方向移动,齿盘510反向移动使四个固定板50同步远离置物台5中心方向移动。
39.升降装置3带动夹持有无人机的夹持装置2自悬停口11移动至停放台41上,夹持杆22向背运动,使无人机置于置物台5上,且无人机的支脚置于四个固定板50之间,固定板50同步向置物台5的中心方向移动直至四个固定板50均与无人机的支脚抵接,此过程固定板50能够推着无人机的支脚使无人机在置物台5上移动,以对无人机在置物台5上的位置进行调整后,再对无人机进行固定。
40.参照图7,腔室10包括第一腔体100和第二腔体101,第一腔体100和第二腔体101分别置于支撑杆40的两侧,夹持装置2与升降装置3置于第一腔体100内,停放台41能够自第一腔体100转动到第二腔体101内,还可以自第二腔体101转动到第一腔体100内。
41.参照图7和图8,第二腔室10内设置有充电装置6,充电装置6包括充电头60、与充电头60连通的充电线61以及推动充电头60移动的第一推动件62,第一推动件62设置为电动推杆,第一推动件62的推动杆与充电头60粘接,无人机的机身上设置有与充电头60匹配的充电口,第一推动件62的推动杆伸长能够带动充电头60移动,使充电头60与充电口插接,以在停放台41上对无人机进行充电。
42.参照图9,悬停口11处设置有密封盖7,密封盖7与箱体1的顶部滑动连接,箱体1上还设置有第二推动件70,第二推动件70用于推动密封盖7移动,密封盖7能够移动至悬停口11出对悬停口11进行密封,以减少雨水进入箱体1的现象出现。
43.本技术实施例一种有自动回收功能的车载无人机作业装置的实施原理为:使无人机置于悬停口11处,升降装置3驱动夹持装置2移动,使夹持杆22置于无人机支脚的两侧,夹持杆22夹持无人机后,升降装置3驱动夹持装置2移动使无人机放置在置物台5上后,夹持装
置2松开无人机,固定板50移动,推动无人机在置物台5上移动,以对无人机的位置进行调整后固定无人机,放置有无人机的停放台41绕支撑杆40的轴线在水平方向转动180
°
,停放台41自第一腔室10转动至第二腔室10,此时无人机的充电口与箱体1上的充电头60对齐,第一推动件62推动充电头60移动,使充电头60与充电口插接,以对无人机进行充电。前一台无人机自悬停口11进入箱体内停放在停放台41上后,该停放台41转动移开,后一辆无人机可以停放在下一个停放台41上,以达到同时收纳多台无人机的目的,有利于无人机的统一管理和收纳。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1