一种考虑车车通讯数据概率化丢失的车辆状态估计方法与流程
本发明涉及新能源汽车,更具体的说是涉及一种考虑车车通讯数据概率化丢失的车辆状态估计方法。
背景技术:
1、对智能网联车辆运动状态的准确估计可以为其他车辆的实时驾驶决策提供有效的辅助,车辆的运动状态直接关系到车辆的驾驶操作,因此运动状态的估计一直是汽车的核心技术。
2、然而,现有的估计分布式驱动车辆状态的研究没有充分考虑车车通信的优势,同时也忽略了数据传输过程中的数据丢失,这导致这些技术在复杂场景下无法实车应用。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种考虑车车通讯数据概率化丢失的车辆状态估计方法,能够解决针对背景技术中所提及到的缺陷。
2、为实现上述目的,本发明提供了如下技术方案:
3、一种考虑车车通讯数据概率化丢失的车辆状态估计方法,具体包括一下步骤:
4、s1:基于车载传感器获得前车纵向速度、横向速度和横摆角速度信号并建立包括纵向速度、横向速度和横摆角速度的非线性车辆动力学模型和轮胎力计算模型;
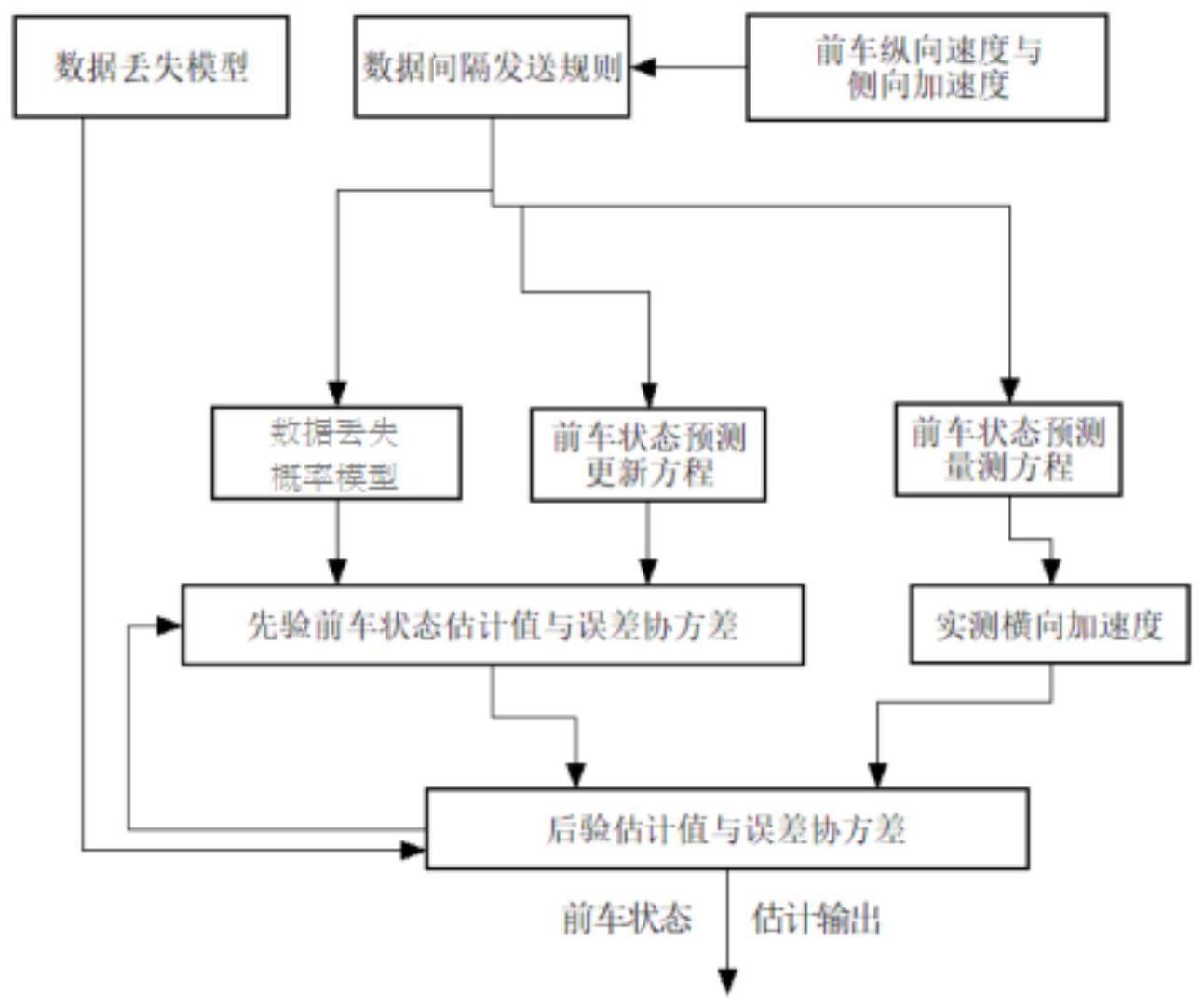
5、s2:基于车载的无线通讯网路建立无线通讯数据间隔发送规则并构建数据丢失概率模型,设计状态估计的更新方程和量测方程;
6、s3:结合非线性车辆动力学模型与数据丢失概率模型,利用事件触发容积卡尔曼滤波对车辆的质心侧偏角进行估计生成估计值,此后将估计值代入作为下一时刻的输入值,根据第二步和第三步的动态循环完成前车质心偏角估计。
7、作为本发明的进一步改进,所述步骤s1中的非线性车辆动力学模型根据车辆模型动力学方程构建,所述车辆模型动力学方程具体为:
8、
9、
10、
11、
12、
13、其中:i=f,r分别表示前轮和后轮,j=l,r分别表示左轮和后轮,vx为车辆纵向速度,fxfl为轮胎纵向力,fyfl为轮胎侧向力,mz为车辆横摆力矩,γ为横摆角速度,m为汽车总质量,a为前轴到质心的距离,b为后轴到质心的距离,δ为前轮转角,ax为纵向加速度,ay为侧向加速度,iz为绕z轴的转动惯量,μ为路面附着系统,β为质心侧偏角,tf,tr分别为车辆前轴和后轴轮距;
14、由于四轮轮毂电机驱动电动汽车四轮驱动或制动转矩独立可控,建立用于计算四个车轮的纵向力的轮胎力计算模型:
15、
16、其中:为车辆驱动力矩,wij为车轮转速,j为车轮转动惯量,r为车轮滚动半径。
17、作为本发明的进一步改进,所述步骤s2中数据发生规则和概率化丢失模型的建立具体方式为:
18、建立无线通讯数据间隔发送规则:
19、
20、
21、其中:表征目前正在传输到后车的测量值,是上一时刻传输到后车的测量值,zk是当前时刻前车传感器的测量输出值,ρ是数据是否发送的阈值,γk是作为前车传感器数据是否被传输的指标,当γk为0值表征预测器在进行下一次迭代更新时仍然使用前一时刻的测量数据,当γk为1值时表征最新的纵向速度和横向加速度的测量值被传输到状态估计器中;
22、建立数据丢失概率化模型:
23、
24、其中:δ→∞和i是一个单位矩阵,当λk=0,传感器的测量数据将在传输过程中丢失,当λk=1,估计器将接收传感器的当前测量数据;
25、根据公式(1)-公式(6)建立前车状态估计更新方程与测量方程:
26、
27、状态变量为:
28、xk=[r,β]t
29、量测变量为:
30、z=[r]t
31、输入变量为:
32、u=[δ,vx,fxfl,fxfr,fxrl,fxrl,fyfl,fyfr,fyrl,fyrl]t
33、其中:k为采样时间,xk为状态变量,zk为测量变量,f为状态转移函数,γ为测量输出函数,[]t为矩阵装置,uk为输入变量,vk为系统过程噪声,过程噪声的协方差为ζk为系统测量噪声,测量噪声的协方差为rk,vk和ζk是零均值高斯白噪声,彼此不相关,初始状态x0也独立于所有的噪声信号。
34、作为本发明的进一步改进,所述步骤s3中事件触发容积卡尔曼滤波方法,步骤如下:
35、计算初始的状态向量和协方差矩阵:
36、
37、
38、其中:e是进行数学期望,x0表示待预测向量初值,p0表示对应的初始协方差矩阵;
39、计算基本的容积点和权重
40、
41、
42、其中:c是容积点,n=3是状态向量维度;
43、对公式(12)中的协方差矩阵p0进行对角化得到
44、
45、其中:u和v分别是上三角和下三角矩阵,s是对角矩阵;
46、计算容积点:
47、
48、对容积点进行先验传播:
49、
50、估计估计状态和协方差
51、
52、
53、定义递推滤波形式如下:
54、
55、其中:kk+1是mk+1估计器的增益矩阵,是后验估计值,是先验估计值;
56、设定后验状态估计偏差为先验状态估计偏差为
57、当γk+1=1时,增益kk+1和后验误差协方差
58、
59、
60、其中:和pzz,k+1分别是一般状态估计误差协方差和估计测量协方差;
61、当γk+1=0时,等式(19)可以表达为:
62、
63、对f(xk,uk)在进行一阶泰勒展开得到:
64、
65、
66、其中:αk是一个代表高阶项的矩阵;
67、对γ(xk+1,uk+1)进行一阶泰勒展开得到:
68、
69、其中:θk是一个代表高阶项的矩阵;
70、公式(10)减去公式(22),可以表达如下:
71、
72、根据公式(25),可以改写为:
73、
74、根据公式(27),计算如下:
75、
76、其中:
77、
78、
79、
80、因为ek和ζk是独立的,所述zk+1等于零,对于ωk+1和ψk+1应用如下引理,对于两个向量x,y∈rn,r为实数集合且σ>0.有;
81、xyt+yxt≤axxt+a-1yyt (29)
82、根据公式(28),有以下不等式:
83、
84、把公式(29)带入公式(27),的上界为:
85、
86、其中a1和a2是一个正数,基于等式(20)和(30),误差协方差上界表达如下:
87、
88、对相对mk+1求微分等于零:
89、
90、增益mk+1如下:
91、
92、在获得增益矩阵后对进行对角化:
93、
94、计算容积点:
95、
96、对容积点进行先验传播:
97、
98、估计测量向量和新息协方差以及互协方差
99、
100、
101、
102、通过公式(20)和公式(34)计算出的kk+1或者mk+1值,并通过公式(19)进行状态后验更新。
103、本发明的有益效果:通过考虑利用车载通讯功能,进行先验和后验滤波设计新的估计方法,为前车状态估计提供新的方法,通过建立数据间隔发送规则和数据丢失模型,大幅度减小通讯成本,在数据发生丢失时也能很好的估计车辆的状态,提高实车应用的准确估计效果。
- 还没有人留言评论。精彩留言会获得点赞!