泊车方法、终端及计算机可读存储介质与流程
本发明实施例涉及无人驾驶泊车,尤其是涉及一种泊车方法、终端及计算机可读存储介质。
背景技术:
1、目前市场上目前存在的无人驾驶汽车智慧泊车方法,主要是依据全球定位系统(global positioning system,gps)提前定位规划固定位置,通过超声波雷达、三维摄像等先进技术进行避障,提高了无人驾驶的新的体验。然而,目前无人汽车停泊点是提前设定固定的停泊点,在偏远地区无法每个位置都设定固定停泊点,无法满足人们随叫随到,快捷的生活体验;而遇到恶劣天气时更是不便。
技术实现思路
1、鉴于以上内容,有必要提供一种泊车方法、终端及计算机可读存储介质,能够实现无人驾驶,自主的行驶到车主的面前,无需提前设定好固定泊车位,实现智慧化无人驾驶泊车方案。
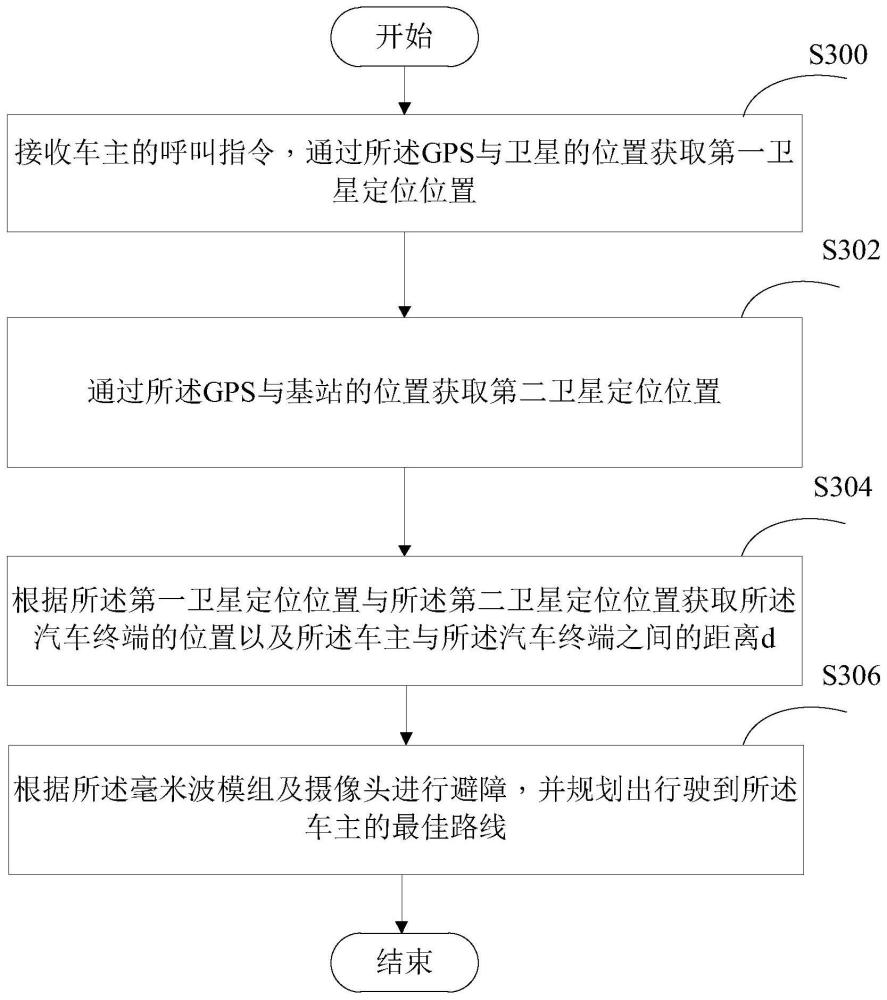
2、本发明实施例提供了一种泊车方法,应用于汽车终端,所述汽车终端包括gps及毫米波(millimeter wave,mmwave)模组,所述方法包括:接收车主的呼叫指令,通过所述gps与卫星的位置获取第一卫星定位位置;通过所述gps与基站的位置获取第二卫星定位位置;根据所述第一卫星定位位置与所述第二卫星定位位置获取所述汽车终端的位置以及所述车主与所述汽车终端之间的距离d;根据所述毫米波模组及摄像头进行避障,并规划出行驶到所述车主的最佳路线。
3、可选地,所述终端车主携带sim主卡,所述汽车终端配置sim副卡,所述车主通过所述sim主卡呼叫所述汽车终端的sim副卡,所述接收车主的呼叫指令包括:所述汽车终端开启所述gps及所述毫米波模组。
4、可选地,所述通过所述gps与卫星的位置获取第一卫星定位位置包括:接收第一卫星、第二卫星、第三卫星及第四卫星的位置信息;预设时间内搜集3次所述汽车终端的位置信息m04、m03、m02;将m04、m03、m02三点定位连线的中心作为所述第一卫星定位位置m0。
5、可选地,所述通过所述gps与卫星的位置获取第二卫星定位位置包括:所述副sim卡通过第一基站、第二基站、第三基站及第四基站定位3次坐标位置m05、m06、m07;将m05、m06、m07三点定位连线的重心作为所述第二卫星定位位置m01。
6、可选地,所述根据所述第一卫星定位位置与所述第二卫星定位位置获取所述汽车终端的位置以及所述车主与所述汽车终端之间的距离d,包括:将所述第一卫星定位位置m0与所述第二卫星定位位置m01的连线的中点作为所述汽车终端的位置m;所述sim主卡与所述sim副卡同步分享各自的位置信息,其中,所述车主的sim主卡的位置为所述车主的位置o;通过所述gps测量出位置m到位置o的距离为d。
7、可选地,所述根据所述毫米波模组及摄像头进行避障,并规划出行驶到所述车主的最佳路线,包括:通过所述摄像头进行道路学习,并记忆对比所述gps的三维图以及场景图;通过磁力计,陀螺仪,加速计,测速系统,即使gps信息进行位置修正;通过所述摄像头记忆斑马线,红绿灯,行车线,路面平整度信息,并根据实时的交通信息进行安全行驶。
8、本发明实施例还提供一种汽车终端,所述汽车终端包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的泊车程序,所述泊车程序被所述处理器执行时实现如上所述的泊车方法的步骤。
9、本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的泊车方法的步骤。
10、相较于现有技术,所述泊车方法、汽车终端及计算机可读存储介质,通过接收车主的呼叫指令,通过所述gps与卫星的位置获取第一卫星定位位置;通过所述gps与基站的位置获取第二卫星定位位置;根据所述第一卫星定位位置与所述第二卫星定位位置获取所述汽车终端的位置以及所述车主与所述汽车终端之间的距离d;根据所述毫米波模组及摄像头进行避障,并规划出行驶到所述车主的最佳路线。这样能够实现无人驾驶,自主的行驶到车主的面前,无需提前设定好固定泊车位,更加方便快捷,更适合偏远地区,以及恶劣天气出行,节省偏远提前设定固定泊车点的程序,提高了智能的生活体验,尤其解决了自己动识别车主,提供最后几米的无人驾驶汽车接待服务,提出更实现智慧化无人驾驶泊车方案。
技术特征:
1.一种泊车方法,应用于汽车终端,其特征在于,所述汽车终端包括gps及毫米波模组,所述方法包括:
2.如权利要求1所述的泊车方法,其特征在于,所述车主携带sim主卡,所述汽车终端配置sim副卡,所述车主通过所述sim主卡呼叫所述汽车终端的sim副卡,所述接收所述汽车终端的车主的呼叫指令包括:
3.如权利要求1所述的泊车方法,其特征在于,所述通过所述gps与卫星的位置获取第一卫星定位位置包括:
4.如权利要求3所述的泊车方法,其特征在于,所述通过所述gps与卫星的位置获取第二卫星定位位置包括:
5.如权利要求4所述的泊车方法,其特征在于,所述根据所述第一卫星定位位置与所述第二卫星定位位置获取所述汽车终端的位置以及所述车主与所述汽车终端之间的距离d,包括:
6.如权利要求4所述的泊车方法,其特征在于,所述根据所述毫米波模组及摄像头进行避障,并规划出行驶到所述车主的最佳路线,包括:
7.一种汽车终端,其特征在于,所述汽车终端包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的泊车程序,所述泊车程序被所述处理器执行时实现如权利要求1至6中任一项所述的泊车方法的步骤。
8.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至6中任一项所述的泊车方法的步骤。
技术总结
一种泊车方法,应用于汽车终端,所述汽车终端包括GPS及毫米波模组,所述方法包括:接收车主的呼叫指令,通过所述GPS与卫星的位置获取第一卫星定位位置;通过所述GPS与基站的位置获取第二卫星定位位置;根据所述第一卫星定位位置与所述第二卫星定位位置获取所述汽车终端的位置以及所述车主与所述汽车终端之间的距离d;根据所述毫米波模组及摄像头进行避障,并规划出行驶到所述车主的最佳路线。本发明还提供一种汽车终端及计算机可读存储介质,能够实现无人驾驶,自主的行驶到车主的面前,无需提前设定好固定泊车位。
技术研发人员:刘晓丰
受保护的技术使用者:南宁富联富桂精密工业有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!