用于操作车辆的方法、设备和车辆与流程
用于操作车辆的方法、设备和车辆
1.本技术是申请日为2019年1月24日、申请号为201910069748.x、发明名称为“车辆的速度行为规划”的申请的分案申请。
技术领域
2.本发明涉及车辆的速度行为规划。
技术实现要素:
3.通常,在一个方面,一种方法,包括:接收正被驾驶的车辆的与速度行为因素有关的当前信息;基于所述速度行为因素来推导所述车辆的候选速度行为;以及基于所述候选速度来推导确定速度行为。
4.在该方法的一些实现中,接收与速度行为因素有关的当前信息可以包括:从一个或多个传感器接收信号。接收与速度行为因素有关的当前信息可以包括从数据源以远程、本地或这两者的方式接收信息。速度行为因素可以包括以下项中的一个或多个:法律规范、移动物体、事件、车辆的机械限制、车辆组件的状况、天气状况、用户偏好、阻塞和道路特征。在该方法的一些实现中,候选速度行为可以包括速度限制。
5.在该方法的一些实现中,可以沿着轨线应用候选速度行为的推导或确定速度行为的推导。可以在空间域或时域或这两者中执行候选速度行为的推导或确定速度行为的推导。
6.在该方法的一些实现中,推导候选速度行为可以包括使沿着轨线的速度限制连接在一起。推导候选速度行为可以包括识别一个或多个给定速度限制的聚合的极小值。推导候选速度行为可以包括使用函数来描述速度行为因素和车辆之间的速度行为。推导候选速度行为可以包括使用函数来对一个或多个速度不连续进行平滑。在该方法的一些实现中,该函数可以将速度与距离或时间或这两者相关联。该函数可以包括线性函数或非线性函数或这两者。
7.在该方法的一些实现中,对一个或多个不连续进行平滑可以包括对阶跃下降的不连续进行平滑。对一个或多个不连续进行平滑可以包括对阶跃上升的不连续进行平滑。对一个或多个不连续进行平滑可以包括忽略对阶跃上升的不连续的平滑。
8.在该方法的一些实现中,推导候选速度行为或推导确定速度行为可以包括使用排队处理来将一个或多个候选速度行为保持并布置成队列。可以基于一个或多个速度行为的速度值来对队列进行排序。队列可以依赖于时间、依赖于空间或依赖于这两者。
9.在该方法的一些实现中,推导确定速度行为可以包括使用优化算法来找到速度行为。推导确定速度行为可以包括优化加速度的平滑。推导确定速度行为可以包括优化加加速度的平滑。推导确定速度行为可以包括将速度行为视为优化算法中的硬约束。推导确定速度行为可以包括将速度行为视为优化算法中的软约束。推导确定速度行为可以包括将速度行为视为优化算法中的部分软约束和部分硬约束。推导确定速度行为可以包括考虑过去的行驶速度行为。推导确定速度行为可以包括考虑过去的确定速度行为。推导确定速度行
为可以包括考虑车辆的当前速度。推导确定速度行为可以包括最大化行驶距离。推导确定速度行为可以包括最小化行驶时间。推导确定速度行为可以包括优化纵向速度行为。推导确定速度行为可以包括优化横向速度行为。推导确定速度行为可以包括在优化处理中一起优化纵向速度行为和横向速度行为。
10.该方法的实现可以包括与一个或多个远程计算装置通信。通信可以包括与一个或多个移动装置通信。通信可以包括与一个或多个用户接口装置通信。通信可以包括与一个或多个远程操作服务器通信。通信可以包括与一个或多个车队管理服务器通信。
11.该方法的实现可以包括基于确定速度行为来自驱动所述车辆。
12.该方法的实现可以包括以每秒至少一次的时间频率来迭代活动。该方法的实现可以包括以每1m至少一次的空间频率来迭代活动。该方法的实现可以包括在给定轨线中的分叉点处或之前迭代活动。该方法的实现可以包括在给定轨线中的合并点处或之前迭代活动。该方法的实现可以包括在给定轨线中的交叉点处或之前迭代活动。
13.该方法的实现可以包括可视化确定速度行为。
14.通常,在一个方面,车辆包括:(a)驱动组件,其包括加速组件、转向组件和减速组件;(b)自主驾驶能力,用于向所述驱动组件发出用以按照至少部分自主驱动模式来驱动所述车辆的信号;(c)规划组件,用于接收与速度行为因素有关的当前信息,基于速度行为因素推导车辆的候选速度行为,并基于候选速度行为推导确定速度行为;(d)命令组件,用于使驱动组件基于确定速度行为自驱动所述车辆。
15.在该车辆的一些实现中,接收与速度行为因素有关的当前信息可以包括从一个或多个传感器接收信号。接收与速度行为因素有关的当前信息可以包括从数据源以远程或本地或这两者的方式接收信息。速度行为因素可以包括以下中的一个或多个:法律规范、移动物体、事件、车辆的机械限制、车辆组件的状况、天气状况、用户偏好、阻塞和道路特征。
16.在该车辆的一些实现中,候选速度行为可包括速度限制。可以沿轨线应用候选速度行为的推导或确定速度行为的推导。可以在空间域或时域或这两者中执行候选速度行为的推导或确定速度行为的推导。推导候选速度行为可以包括将沿着轨线的速度限制连接在一起。推导候选速度行为可以包括识别一个或多个给定速度限制的聚合的极小值。推导候选速度行为可以包括使用函数来描述速度行为因素和车辆之间的速度行为。推导候选速度行为可以包括使用函数来对一个或多个速度的不连续进行平滑。该函数可以将速度与距离或时间或这两者相关联。该函数可以包括线性函数或非线性函数或这两者。
17.在该车辆的一些实现中,对一个或多个不连续进行平滑可以包括对阶跃下降的不连续进行平滑。对一个或多个不连续进行平滑可以包括对阶跃上升的不连续进行平滑。对一个或多个不连续进行平滑可以包括忽略对阶跃上升的不连续的平滑。
18.在该车辆的一些实现中,推导候选速度行为或推导确定速度行为可以包括使用排队处理来将一个或多个候选速度行为保持并布置成队列。可以基于一个或多个速度行为的速度值来对队列进行排序。队列可以依赖于时间、依赖于空间或依赖于这两者。
19.在该车辆的一些实现中,推导确定速度行为可以包括使用优化算法来找到速度行为。推导确定速度行为可以包括优化加速度的平滑。推导确定速度行为可以包括优化加加速度的平滑。推导确定速度行为可以包括将速度行为视为优化算法中的硬约束。推导确定速度行为可以包括将速度行为视为优化算法中的软约束。推导确定速度行为可以包括将速
度行为视为优化算法中的部分软约束和部分硬约束。推导确定速度行为包括考虑过去的行驶速度行为。推导确定速度行为可以包括考虑过去的确定速度行为。推导确定速度行为可以包括考虑车辆的当前速度。推导确定速度行为可以包括最大化行驶距离。推导确定速度行为可以包括最小化行驶时间。推导确定速度行为可以包括优化纵向速度行为。推导确定速度行为可以包括优化横向速度行为。推导确定速度行为可以包括在优化处理中一起优化纵向速度行为和横向速度行为。
20.该车辆的实现可以包括与一个或多个远程计算装置通信的通信组件。通信组件可以与一个或多个移动装置通信。通信组件可以与一个或多个用户接口装置通信。通信组件可以与一个或多个远程操作服务器通信。通信组件可以与一个或多个车队管理服务器通信。
21.在该车辆的一些实现中,规划组件可以以每秒至少一次的时间频率来迭代处理活动。规划组件可以以每1m至少一次的空间频率来迭代处理活动。规划组件可以在给定轨线中的分叉点处或之前迭代处理活动。规划组件可以在给定轨线中的合并点处或之前迭代处理活动。规划组件可以在给定轨线中的交叉点处或之前迭代处理活动。
22.该车辆的实现可以包括用于可视化确定速度行为的显示器。
23.通常,在一个方面,一种设备可以包括:指令的存储器;以及处理器,用于根据指令操作的处理器,以(1)接收正被驾驶车辆的与速度行为因素有关的当前信息,(2)基于速度行为因素推导车辆的候选速度行为,并且(3)基于候选速度行为推导确定速度行为。
24.在该设备的一些实现中,接收与速度行为因素有关的当前信息可以包括从一个或多个传感器接收信号。接收与速度行为因素有关的当前信息可以包括从数据源以远程或本地或这两者的方式接收信息。速度行为因素可以包括以下中的一个或多个:法律规范、移动物体、事件、车辆的机械限制、车辆组件的状况、天气状况、用户偏好、阻塞和道路特征。候选速度行为可以包括速度限制。
25.在该设备的一些实现中,可以沿着轨线应用候选速度行为的推导或确定速度行为的推导。可以在空间域或时域或这两者中执行候选速度行为的推导或确定速度行为的推导。推导候选速度行为可以包括将沿着轨线速度限制连接在一起。推导候选速度行为可以包括识别一个或多个给定速度限制的聚合的极小值。推导候选速度行为可以包括使用函数来描述速度行为因素和车辆之间的速度行为。推导候选速度行为可以包括使用函数来对一个或多个速度的不连续进行平滑。该函数可以将速度与距离或时间或这两者相关联。该函数可以包括线性函数或非线性函数或这两者。
26.在该设备的一些实现中,对一个或多个不连续进行平滑可以包括对阶跃下降的不连续进行平滑。对一个或多个不连续进行平滑可以包括对阶跃上升的不连续进行平滑。对一个或多个不连续进行平滑可以包括忽略对阶跃上升的不连续的平滑。
27.在该设备的一些实现中,推导候选速度行为或推导确定速度行为可以包括使用排队处理来将一个或多个候选速度行为保持并布置为队列。可以基于一个或多个速度行为的速度值来对队列进行排序。队列可以依赖于时间、依赖于空间或依赖于这两者。推导确定速度行为可以包括使用优化算法来找到速度行为。推导确定速度行为可以包括优化加速的平滑。推导确定速度行为可以包括优化加加速度的平滑。推导确定速度行为可以包括将速度行为视为优化算法中的硬约束。推导确定速度行为可以包括将速度行为视为优化算法中的
软约束。推导确定速度行为可以包括将速度行为视为优化算法中的部分软约束和部分硬约束。推导确定速度行为可以包括考虑过去的行驶速度行为。推导确定速度行为可以包括考虑过去的确定速度行为。推导确定速度行为可以包括考虑车辆的当前速度。推导确定速度行为可以包括最大化行驶距离。推导确定速度行为可以包括最小化行驶时间。推导确定速度行为可以包括优化纵向速度行为。推导确定速度行为可以包括优化横向速度行为。推导确定速度行为可以包括在优化处理中一起优化纵向速度行为和横向速度行为。
28.该设备的实现可以包括与一个或多个远程计算装置通信的通信组件。通信组件可以与一个或多个移动装置通信。通信组件可以与一个或多个用户接口装置通信。通信组件可以与一个或多个远程操作服务器通信。通信组件可以与一个或多个车队管理服务器通信。通信组件可以发送命令以基于确定速度行为来自驱动车辆。
29.在该设备的一些实现中,处理器可以每秒至少一次的时间频率来迭代处理活动。处理器可以以每1m至少一次的空间频率来迭代处理活动。处理器可以在给定轨线中的分叉点处或之前迭代处理活动。处理器可以在给定轨线中的合并点处或之前迭代处理活动。处理器可以在给定轨线中的交叉点处或之前迭代处理活动。
30.该设备的实现可以包括显示器,或者与显示器通信以可视化确定速度行为。
31.这些和其它方面、特征和实现可以表示为方法、设备、系统、组件、程序产品、开展业务的方法、用于执行功能的部件或步骤、以及以其它方式。
32.根据以下的包含权利要求书的描述,这些和其它方面、特征和实现将变得明显。
附图说明
33.图1是av系统的框图。
34.图2示出与其它设备通信的速度行为规划器的示例。
35.图3示出速度行为规划处理的示例。
36.图4示出速度行为因素及其速度行为的示例。
37.图5~图12示出候选速度行为和确定速度行为的示例。
38.图13示出速度行为规划器的处理流程的示例。
具体实施方式
39.术语“自主车辆”或“av”广义地用于包括例如具有一个或多个自主驾驶能力的车辆。
40.术语“自主驾驶能力”广义地用于包括例如除通过人操纵av的方向盘、加速器、制动器或其它物理控制器以外的、可以参与av驾驶的任何功能、特征或设施。
41.术语“轨线”广义地用于包括例如从一个地方到另一个地方的任何路径或路线;例如,从上车地点到下车地点的路径,或向着终点位置的路径。在一些实现中,轨线可以与速度行为信息结合。
42.术语“终点”或“终点位置”广义地用于包括例如av要到达的任何地方,包括例如临时下车地点、最终下车地点或目的地等。
43.术语“行驶环境”广义地用于包括例如车辆正在行驶的物理世界的任何特征、属性、条件或参数,举例来说,包括道路网络、以及诸如建筑物、其它车辆或行人等的静态和移
动的物理对象。行驶环境可以与最接近或附近或邻近相关联,或者与诸如沿着车辆的规划轨线的地方等的更远的地方相关联。
44.术语“事件”广义地用于包括例如可以干扰沿道路网络行进的任何事件,例如,运动会、游戏、马拉松、抗议、游行、音乐会、政治活动、火灾、洪水、碰撞、交通灯故障、恶劣天气和警方行动。
45.术语“速度行为因素”广义地用于包括例如用于推导一个或多个速度行为或者与一个或多个速度行为相关的、或者应用于或可以应用于计算、提议、控制、建议或指示一个或多个速度行为的任何特征、属性、参数、环境、影响、值、对象、上下文、规范、条件、法律或约束。
46.术语“速度行为”广义地用于包括例如车辆的任何行为或操作,其包括、定义、暗示车辆的速度、以车辆的速度为基础、或以其它方式与车辆的速度相关,诸如恒定速度、最大速度、最小速度、改变速度、零速度,速度的导数、速度的数学函数、可行驶的速度模式或任何其它速度轮廓线。在一些情况下,速度行为可以是计算地或以某种其它方式从一个或多个速度行为因素或者与行驶环境或车辆系统状况有关的信息或者它们的组合而推导、提出、控制、建议或指示的。速度行为可以表现为时域或空间域或这两个域中的函数。速度行为可以在给定时间处或时间段期间表现,包括任何固定速度、变化速度、最小速度、最大速度、变化速度轮廓线、条件速度轮廓线、候选速度轮廓线、确定速度轮廓线或它们的组合。速度行为可能牵涉速度限制,例如速度行为所建议或要求的最大速度或最小速度等。
47.术语“速度限制”广义地用于包括例如包含对车辆速度的限制的速度行为,例如最大速度限制或最小速度限制等。
48.术语“候选速度行为”广义地用于包括例如车辆的任何假定的、可能的、潜在的或假设的速度行为,其被考虑用作车辆的确定速度行为的一部分或全部。
49.术语“确定速度行为”广义地用于包括例如用于车辆或在车辆行驶中车辆所实际使用的任何实际的、决定的、选择的或应用的速度行为。确定速度行为可以与候选速度行为相同、从候选速度行为推导或者是候选速度行为的修改版本。
50.av系统
51.本文描述了适用于例如具有一个或多个自主驾驶能力的任何车辆的技术,该车辆包括全自主车辆、高度自主车辆和有条件自主车辆,诸如分别为所谓的5级、4级和3级车辆等(关于车辆自主水平等级的更多细节,参见sae国际标准j3016:taxonomy and definitions for terms related to on-road motor vehicle automated driving systems(与道路机动车辆自主驾驶系统相关的术语的分类和定义),其全部内容通过引用并入于此)。自主驾驶能力可以包括控制车辆的转向或速度。本文中描述的技术也可以应用于部分自主车辆和驾驶员辅助车辆,诸如所谓的2级和1级车辆等(参见sae国际标准j3016:taxonomy and definitions for terms related to on-road motor vehicle automated driving systems)。1级、2级、3级、4级和5级车辆中的一个或多个可以基于对传感器输入的处理来在特定行驶条件下使特定车辆操作(例如,转向、制动和使用地图)自动化。本文中描述的技术可以使范围从完全自主车辆到人操作车辆的具有任何自主水平的车辆均受益。
52.如图1所示,av 100的典型活动是在避开物体(例如,山191、车辆193、行人192、骑车人和其它障碍)并遵守道路规则(例如,操作规则或驾驶偏好)的情况下,安全且可靠地、
自主或部分地手动或两者兼有地沿着轨线198通过环境190向着终点位置199行驶。
53.av 100的驾驶通常由一系列技术(例如,硬件、软件、以及存储的实时数据)支持,本文有时将这些技术一起(与av 100一起)称为av系统120。在一些实现中,一种或一些或所有技术用在av 100上。在一些情况下,av系统的一个或一些或所有技术可以用在其它地方,例如在服务器处(例如,在云计算基础设施中)等。av系统120的组件可包括以下组件(以及其它)中的一个或多个或全部。
54.1.av 100的功能装置101,其被装配成接收和作用于来自一个或多个计算处理器146和148的用于驾驶(例如,转向102、加速、减速、档位选择和制动103)并且用于辅助功能(例如,转弯信号激活)的命令。
55.2.一个或多个数据存储单元142或存储器144或这两者,用于存储机器指令或各种类型的数据或这两者。
56.3.一个或多个传感器121,用于测量或推断(或这两者)av状态或状况的属性,例如,av的位置、线性和角速度和加速度、以及前进方向(例如,av的前端的朝向)。例如,这种传感器可以包括但不限于:gps;惯性测量单元,用于测量车辆线性加速度和角速率这两者;个体车轮速度传感器,用于测量或估计个体车轮滑移率;个体车轮制动压力或制动力矩传感器;发动机力矩或个体车轮力矩传感器;以及方向盘角度和角速率传感器。
57.4.一个或多个传感器,用于感测或测量av环境的属性。例如,这种传感器可包括但不限于:在可见光、红外或热(或这两者)光谱中操作的单目或立体摄像机122;激光雷达123;雷达;超声波传感器;飞行时间(tof)深度传感器;速度传感器;以及温度和雨水传感器。
58.5.一个或多个通信装置140,用于通信所测量或推断或这两者的av或其它车辆的状态和状况的属性,例如位置、线性和角速度、线性和角度加速度、以及线性和角度前进方向等。这些装置包括车对车(v2v)和车对基础设施(v2i)通信装置、以及用于通过点对点或自组织网络或这两者进行无线通信的装置。通信装置140可以经由电磁频谱(包括无线电和光通信)或其它媒介(例如,空气和声学媒介)进行通信。
59.6.一个或多个通信接口140(例如,有线、无线、wimax、wi-fi、蓝牙、卫星、蜂窝、光学、近场或无线电或它们的组合),用于向远程数据库134发送数据和从远程数据库134向av系统120发送数据,向远程数据库134或从远程数据库134发送传感器数据或与驾驶性能有关的数据,或者发送与av系统的操作或远程操作有关的信息,或者它们的组合。
60.7.一个或多个数据源142,用于提供与av环境190有关的历史、或者实时或预测信息、或者其中任何两个或更多个的组合,包括例如地图、驾驶性能、交通拥堵更新或天气状况等。这样的数据可以存储在av 100的数据存储单元142或存储器144上,或者可以经由通信信道从远程数据库134发送到av100,或者它们的组合。
61.8.一个或多个数据源136,用于从gis数据库提供数字道路地图数据,潜在地包括以下中的一个或多个:道路几何属性的高精度地图;描述道路网络连通性属性的地图;描述道路物理属性(例如,交通速度、交通量、车辆和骑车人的车道数量、车道宽度、车道交通方向或车道标记类型和位置、或它们的组合)的地图;以及描述道路空间位置特征(例如,人行横道、交通标志或其它各种行进信号)的地图。这样的数据可以存储在av 100的存储器144上,或者经由通信信道从远程数据库服务器134发送到av 100,或者这两者的组合。
62.9.一个或多个数据源134或传感器132,用于提供与例如在一天的类似时间的先前已经沿着本地道路路段行进的车辆的驾驶属性(例如,速度和加速行为)有关的历史信息。这样的数据可以存储在av 100的存储器144上,或者经由通信信道从远程数据库服务器134发送到av 100,或者这两者的组合。
63.10.一个或多个计算装置146和148,其位于av 100(或远程或这两者)上,用于基于实时传感器数据和先验信息来执行用于(例如,在线)生成控制动作的算法,从而允许av系统120执行其自主驾驶能力。
64.11.一个或多个处理,用于处理传感器数据、感知环境、理解所感知环境当前呈现的以及未来可能呈现的状况、执行轨线规划、执行运动控制、以及基于这些感知和理解做出决定。处理可以通过集成电路、现场可编程门阵列、硬件、软件或固件或其中两个或更多个的组合来实现。
65.12.一个或多个接口装置150(例如,显示器、鼠标、跟踪球、键盘、触摸屏、生物识别读取器、增强现实眼镜、手势读取器、扬声器、麦克风和录音机),其连接到计算装置146和148以向av 100的用户(例如,占用者或远程用户)提供信息和发出警报以及从该用户接收输入。连接可以是无线的或有线的。可以将任何两个或更多个接口装置集成到单个装置中。
66.13.一个或多个应用程序,其运行在av系统的用户的计算装置(例如,移动装置、膝上型计算机、平板电脑或智能电话)上,用于在计算装置上提供交互式用户接口、与av系统(包括与av)通信、执行与控制av的系统的用户参与、av的呼叫、av的使用、向用户提供关于av的信息以及各种其它功能有关的处理。
67.速度行为因素
68.当通过av系统使ac在道路上行驶时,可以通过两个或更多个速度行为因素其中之一或其组合来对av的速度行为进行约束、控制、调制、影响或改变。速度行为因素的示例包括以下:
69.1.法律规范。可以通过用作速度行为因素的法律来指定诸如速度限制(最大限制或最小限制)等的速度行为。例如,公路区段上的最大速度限制可以是65英里每小时(mph);不同的公路区段的速度限制可能不同。闹市区道路的最大速度限制可以是15mph。在一些实例中,法律可能要求车辆在停止标志或停止信号(例如红灯、路标、停止线或者交通指挥员的手势等)处停止,因此在停止标志或停止信号前速度必须是0mph。在一些情况下,可以设置最小速度限制,例如,在受限准入公路上设置最小速度45mph。在一些情况下,法律可能施加其它种类的速度行为,诸如“通过隧道的山地速度”或者“在工作区减速”等。一些法律规范可被视为“硬性速度行为因素”,因为这些法律规范包括对所需要的速度行为的静态特定声明。一些法律规范可被视为“有条件速度行为因素”,因为这些法律规范陈述的是针对其触发条件的速度行为,例如,“如果车辆正在城市区域以外的州际公路上行驶,则最大速度为65mph。如果车辆正在城市区域中的州际公路上行驶,则最大速度为55mph。”一些法律规范是“无条件速度行为因素”的示例,例如“车辆在停止标志处的速度必须为0mph”等。
70.2.行驶环境中的物体。当在行驶环境中检测到物体时,物体的存在可以要求av系统的安全防护或其它适当的速度行为。例如,当接近人行横道线时,av系统可以减小其速度或做出完全停止,以为任何行人让行。在一些实现中,行人或动物可能乱穿道路,并且av系统可以减小其速度或做出完全停止,以避免撞到行人或动物。在一些实例中,当在道路上行
驶时,av系统的速度行为可以要求根据前方车辆的速度来观察速度限制。在一些实现中,av系统可以减小其速度以避免剐蹭或引起邻近物体(例如其它车辆、骑车人或走路的行人等)的紧张。在一些情况下,av系统可以确定并接着避让其它物体(例如停着的轿车、相邻车道的车辆或邻近的人等)附近的缓冲区。例如,缓冲区为其它物体的非预期运动提供了空间。一般地,当av系统的速度相对较高时,可以优选较大的缓冲区。当速度相对较低时,较小的缓冲区就可能足够了。在一些情况下,其它物体附近的可用空间会限制缓冲区的可能大小,并且可能会约束av系统从而将其速度减小至相应的上限速度限制以下。例如,如果街道的可通行部分由于雪堆而变窄,则av系统可以在沿该变窄的可通行部分通过时慢下来。
71.3.事件。事件可以发生在av系统的附近或者可以保留在作为av系统的规划轨线的一部分的道路上。因此,例如可以通过与事件相关联的拥挤度或交通量来对av系统施加最大速度限制。
72.4.机械限制。一般地,例如在av进行变换车道、右转、左转、急转、或u形转弯等的情况下,av系统的操纵将对av施加侧向力。在这些时刻,av的速度将具有沿着行进方向的纵向分量以及垂直于行进方向的侧向分量。为了避免侧翻或打滑,引起侧向力(以及相应的速度的侧向分量)的操纵必须例如通过施加针对纵向分量的最大速度限制来与速度的纵向分量相协调。在一些示例中,速度的突然变化(例如从55mph降至0mph)对av的机械系统是不适用或不适当的,因此可以施加速度行为以使av系统平滑地减小其速度。
73.5.av组件故障。如果av系统的组件在工作时发生故障,则av系统可以自我施加最大速度限制以减小与组件故障相关联的风险。例如,如果胎压降低至安全水平以下,则av可以自我施加45mph的最大速度限制。
74.6.天气条件。av的速度可以受天气条件的限制。例如,由于洪水、下雨或下雪而变湿或结冰的道路表面可以引起av系统将其速度减小至不超过最大速度限制以避免风险。例如,在行驶期间av系统可能偶然使视觉传感器直接朝向强光源(例如太阳),因此视觉感测可能因为极端的亮度而劣化;感测的劣化可以引起av系统降低其速度以使得av系统能够对非预期的行驶场景进行安全的反应。
75.7.用户偏好。av系统可以受到通过用户的偏好施加的速度限制。例如,av系统的驾驶员可能偏好于使其速度不超过阈值,例如40mph。例如,采用了av系统来递送易碎陶瓷件的递送者可能想要限制av系统的速度以避免可能会打破瓷器的剧烈运动。在一些情况下,av系统可被用于携带患者或伤员,并且可以设置最大速度限制以提供患者的舒适性。
76.8.道路特征。道路特征也可以引起速度限制。例如,当道路的弯度高时,av系统的最大速度限制可以变低以避免侧翻或打滑。当道路表面颠簸或没有铺装好的情况下,av系统可以具有较低的最大速度限制。当av系统在山地道路上行驶时,可以对速度进行限制以防止开下悬崖。
77.速度行为规划器
78.如图2所示,av系统的实现可以包括速度行为规划器201。速度行为规划器的重要活动是基于各种相关信息来确定av所用的速度行为并且通常对av的行驶施加速度行为。速度行为规划器可以通过软件、固件或硬件(例如计算装置、电子电路、现场可编程门阵列、或专用集成电路或者其组合等)中的一个或多个、或者其组合、或其它方式来实现。
79.速度行为规划器201可以与av系统200的其它组件进行通信(例如相对于av系统的
其它组件接收或发送信息或指令等)。在一些情况下,这样的组件中的一个或多个可以被包括作为速度行为规划器201的一部分。
80.速度行为规划器201可以与一个或多个传感器202和204进行通信(例如相对于传感器接收或发送信息或指令等)。传感器的示例包括:单目照相机、立体照相机、摄像机、激光雷达、雷达、红外传感器、紫外传感器、温度计、压力传感器、里程表、速度传感器和化学传感器等。一个或多个传感器可以提供表示av系统的运动状态(例如纵向速度、侧向速度、加速度或力矩、或者其组合等)的信号。在一些情况下,一个或多个传感器可以提供与行驶环境(例如道路上的另一移动物体、交通灯信号、可行驶区域、不可行驶区域、车道、交通量、交通速度、人行道标记或交通标志、或者其组合等)有关的信号。
81.速度行为规划器201的实现可以包括与动作规划器216的通信(例如相对于动作规划器216接收或发送信息或指令等)。接收到的信息可以包括朝向终点位置的一条或多条轨线。在一些示例中,速度行为规划器201可以与感知处理器214进行通信以接收与av系统200的感知到的行驶环境(例如,交通灯信号、交通量、交通速度、其它车辆、行人、动物、事件以及隐藏物体等)有关的信息。在一些情况下,感知处理器214可以从传感器接收信号、处理该信号、并将处理结果发送至速度行为规划器201以用于对速度行为进行规划。
82.在一些实现中,速度行为规划器201可以经由网络接口或数据总线与本地数据库212进行通信(例如相对于本地数据库212接收或发送信息或指令等),或者经由无线通信接口210与远程数据库230进行通信(例如相对于远程数据库230接收或发送信息或指令等),或者进行这两种通信。数据库(212或230或两者)可以存储并提供各种类型的信息。信息的示例包括:事件调度、静态信息(例如地图、道路配置、道路复杂度、建筑物、交通标志、交通灯位置、车道、路牙、人行横道以及便道等)、可以由感知处理器214所感知的动态信息(例如交通灯信号、交通量、交通速度、其它车辆、行人、动物以及事件等)、以及可以由动作规划器216创建的路线信息(例如朝向终点位置的轨线等)。
83.在一些实现中,速度行为规划器201可以与用户接口234进行通信(例如相对于用户接口234接收或发送信息或指令等),所述用户接口234可以在计算装置(例如智能电话、移动装置、便携装置或台式机等)上。用户接口234可以本地呈现在av中或av以外,或者呈现在远程位置,或者其组合。可以存在同时与速度行为规划器201进行通信的两个或更多个用户接口。用户接口234可以显示速度信息(例如av系统的速度、其它车辆的速度、速度限制、速度行为因素或所感知的物体、或者其组合)。在一些情况下,与用户接口234的通信可以经由av系统200上的本地网络进行。在一些实现中,与用户接口234的通信可以经由服务器232发生。除了向用户呈现信息以外,用户接口还可以从用户接收偏好、指令或其它信息,例如与偏好或想要的速度限制或其它速度行为有关的信息等。在移动电话或其它移动装置上,可以通过安装在移动装置上并在移动装置上运行的本地应用程序来呈现用户接口。本地应用程序可以被视为av系统的一部分。
84.在一些实现中,速度行为规划器201可以与服务器232进行通信(例如相对于服务器232接收或发送信息或指令等),所述服务器232可以位于av 200上、位于远程位置处、或者在这两者处。可以存在同时与速度行为规划器201进行通信的两个或更多个服务器。服务器232可以提供各种类型的服务。例如,服务器232可以通过将各种类型的前述信息和数据传输至速度行为规划器201来提供数据服务。例如,服务器232可以将速度限制、速度行为因
素、速度行为或其它速度行为、或者其组合传输至速度行为规划器201。
85.在一些示例中,服务器232可以提供远程操作服务,其中远程操作人员(例如人或计算机程序或这两者)可以将速度行为规划所用的命令传输至速度行为规划器201。(与远程操作服务有关的附加信息包含在美国专利申请15/624,780、15/624,802、15/624,819、15/624,838、15/624,839以及15/624,857中,其全部内容通过引用而并入本文。)
86.在一些实例中,服务器232可以提供车队管理服务,其中车队管理者(例如人或计算机程序或这两者)可以将车队信息传输至av系统200以使得速度行为规划器201能够对速度行为规划做出合适的调节。例如,车队管理者可以为av系统指定新的终点位置,因此av系统可以改变其轨线并调节其速度行为。在一些实现中,车队管理者可以接收或预测由于事件的发生而得到的新的行驶信息,并且车队管理者可以请求av系统在其速度行为中设置新的速度限制。
87.速度行为规划
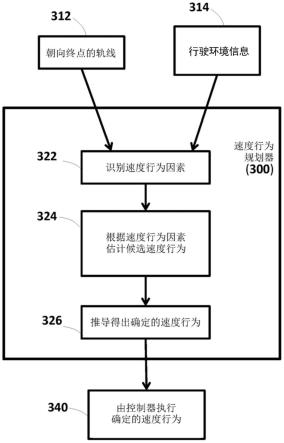
88.速度行为规划器的操作(即速度行为规划)包括多个处理。参考图3,速度行为规划器300可以接收朝向终点位置312的一个或多个轨线。在一些实现中,速度行为规划器300可以接收行驶环境信息314,例如地图、静态信息、动态信息或其组合等。对于每条接收到的轨线,速度行为规划器300可以识别速度行为因素322及其相关联的候选速度行为(例如速度限制等)324。
89.一般地,速度行为规划器300可以对速度行为因素或候选速度行为或这两者进行计算分析,以推导出确定速度行为326。以下将说明推导的详情。
90.通过硬性速度行为因素(例如道路上的法定速度限制)所指定的候选速度行为(例如速度限制等)可以被视为硬性最大速度。速度行为规划器300所确定的确定速度行为可以涉及比通过硬性速度行为因素所指定的最大速度更低。
91.速度行为规划器300的实现可以包括输出候选速度行为或确定速度行为。在一些示例中,速度行为可以是诸如65mph等的简单数字速度值。在一些情况下,可以使用基于av系统的速度行为因素(例如机械性能或行驶环境或这两者)的优化过程来以计算方式对速度行为进行确定。以下将说明计算分析的详情。
92.在一些情况下,可以将识别可用速度行为因素以及评估相应的速度行为组合在单个步骤中。速度行为规划器的输出可以包括将用于使av的控制器根据速度行为对av进行操纵的速度行为340等。
93.图4示出示例。速度行为规划器可以识别速度行为因素并估计各速度行为因素可能对速度行为产生的影响。当av系统400沿着道路行驶时,可能存在由标志410指定或者在针对该段道路的道路数据库中指示的最大速度限制。av系统400的感知处理器可以检测骑行在av系统400前面的骑车人412,因此av的最大速度限制可以被骑车人的速度(例如12mph)所约束。沿着道路还可能存在工作区414,道路在工作区414中变得更窄;av系统400感知工作区并且速度行为规划器估计速度行为因素以达到包括适当的最大速度限制(例如30mph)的候选速度行为。可以通过标绘图450使三个最大速度限制进行可视化,其中线452表示55mph的法定最大速度限制,条454表示12mph的骑车人的速度,并且条456对应于针对工作区所分析出的适当最大速度限制30mph。
94.最大速度限制形式的候选速度行为可以应用于长路段或短路段或单个位置。例
如,在速度-距离的标绘图450中,法定最大速度限制452应用于整个道路。然而,骑车人所施加的最大速度限制454和工作区所暗示的最大速度限制456仅应用于其附近的路段。在考虑到所有的速度限制452、454和456的情况下,速度行为规划器可以通过选择在沿道路的各位置处可用的两个最大速度限制中的最小限制来推导候选速度行为,这得到标绘图460中所示的聚合候选速度行为462。候选速度行为462不是恒定速度,而是不同速度的轮廓线。
95.在一些实现中,可以通过将空间域中的速度转变至时域而将标绘图450和460呈现为速度-时间。该转变可以基于等式:距离=速度
×
时间。
96.可以以各种方式来对候选速度行为进行调节以形成确定速度行为。在一些实现中,速度行为规划器可以通过对速度的不连续进行平滑处理来根据候选速度行为推导出确定速度行为。考虑两种类型的不连续(阶跃上升和阶跃下降),并且以解决阶跃上升的不连续开始。再次参考图4,当速度行为因素不再适用(例如当av系统400在s2处超过骑车人412)时,av系统的最大上限速度限制可以增加。例如,图示的标绘图460示出位置s2处的阶跃上升不连续。字面上看,阶跃上升不连续将需要无限的加速度,这在机械上无法实现。然而,av不能够紧接在阶跃上升不连续之后达到更高的最大速度限制不会导致危险,这是因为在更高的最大速度限制之下的任何速度都被认为是安全的。因此,在不存在安全担忧的情况下,速度行为规划器可以进行也可以不进行对阶跃上升不连续的平滑处理。如果进行平滑处理,则该平滑处理可以采用各种函数中的任何函数(例如线性函数、非线性函数、二次函数、三阶或更高阶函数、sigmoid函数、双曲线函数、逻辑函数或其它函数、或者其组合)。还可以以不通过特定数学函数进行控制的方式来进行平滑处理,而是例如响应于变化的行为因素和非数值行为因素进行平滑处理。参考图5,速度行为标绘图500示出s2处的线性插值速度行为502;速度行为标绘图510示出非线性插值速度行为512。
97.对候选速度行为进行调节以获得确定速度行为的一些实现可以应对阶跃下降不连续。再次参考图4,如果av系统400在位置s0和s1之间以法定最大速度限制(55mph)行驶,则当到达s1时其将突然需要将速度从55mph降至12mph。然而,这样的速度突然下降将要求av系统施加无限的减速度,这在机械上是不可能的。而且,在位置s1(骑车人的实际位置)处,如果av系统400不能够将速度减至骑车人412所施加的最大速度限制,则av可能与骑车人相撞。为了避免潜在的危险,确定速度行为的推导可以包括设置速度限制之间的平滑过渡,例如在要应用较低的上限速度限制的时间或位置之前出现的过渡。与对阶跃上升不连续的平滑处理相比,在对阶跃下降不连续的平滑处理中安全考虑可能更具限制性并且更重要。例如,推导可以使用各种函数中的任何函数(例如线性函数、非线性函数、二次函数、三阶或更高阶函数、sigmoid函数、双曲线函数、逻辑函数或其它函数、或者其组合)来在速度限制之间进行插值处理(包括平滑处理)。还可以以不通过特定数学函数的控制的方式来进行插值处理,而是例如响应于变化的行为因素和非数值行为因素进行插值处理。参考图6,速度行为标绘图600使用线性插值方案,得到线性约束602和604;标绘图610示出非线性插值方案,得到更平滑的约束612和614。
98.根据候选速度行为推导确定速度行为可以包括考虑av系统的当前行驶速度。例如,参考标绘图620,尽管s0和s1之间的可用最大速度限制为50mph(622),但av系统可以以40mph的速度(624)行驶。由于接下来的12mph的速度限制(628)的遭遇可能直接迫使av减速,因此对s1处的阶跃下降不连续的平滑处理可能考虑40mph的当前速度(624)而不考虑可
用最大速度限制50mph(622)来做出插值速度行为626。
99.推导确定速度行为可以包括考虑与速度行为因素、或由速度行为因素指定的速度限制、或由速度行为因素指定的速度或其组合相关联的距离(或时间)。
100.·
例如,图7中的标绘图710示出av系统的当前位置s70、较近的速度行为因素s71以及较远的速度行为因素s72。由于速度行为因素s71较近,因此与达到速度行为因素s72的最大速度限制相比,av系统可以要求更快的减速度来达到速度行为因素s71的最大速度限制。
101.·
例如,图7中的标绘图720示出位置s71处的两个不同的最大速度限制。与得到较低的上限速度限制的候选速度行为724相比,得到较高的上限速度限制的候选速度行为722可以具有更慢的减速度。
102.·
行驶环境中的移动物体可以变为速度行为因素。图7中的标绘图730示出示例。av系统可以正(例如以50mph)行驶在位置s70处并检测到s71处的具有例如35mph的速度的移动物体(例如另一车辆、骑车人、行人、动物或玩具等)。速度行为规划器可以基于移动物体的速度来确定最大速度限制(例如35mph)并生成确定速度行为732。由于av系统和移动物体都在运动中,因此速度行为规划器可以继续监视移动物体的速度。例如,通过虚线734指示,移动物体的速度可能改变。稍后,在av系统慢下来(例如降至45mph)并到达位置s75时,移动物体可能在s76处并具有例如40mph的速度。由于移动物体的速度变化,因而av系统可以通过改变最大速度限制来调节确定速度行为,以产生新的确定速度行为736。速度行为规划器可以选择新的确定速度行为736并丢弃旧的确定速度行为732;在一些情况下,可以优先旧的确定速度行为732(例如由于安全考虑),并丢弃新的确定速度行为736。
103.在一些实现中,av系统可以在道路区段内遭遇两个或更多个速度行为因素。例如在图8中,在av系统800接近前方车辆802时,如标绘图850中的候选速度行为852所示,av系统800需要减慢至前方车辆802的速度或低于前方车辆802的速度。同时,av系统800可以检测到红灯804,这将要求av如候选速度行为854所示地停下。如标绘图850中所示,可以在位置s80和s81之间同时应用两个候选速度行为852和854(例如叠加)。在设置确定速度行为时,速度行为规划器可以在两个候选速度行为之间进行选择。为了安全性考虑,具有较低速度的候选速度行为(例如图8中的854)可以优先于(override)其它候选速度行为。
104.在一些实现中,两个或更多个候选速度行为可以交叉。例如参考图9,给定的轨线可以使av系统900进行右转,这可能引起候选速度行为954将av系统减慢到较低的速度。同时,另一车辆904可能出现,使得速度行为规划器生成另一候选速度行为952。为了避免与车辆904相撞,候选速度行为952可以约束av系统900迅速减速。由于两个候选速度行为在位置s91处交叉,因此速度行为规划器可以通过选择两个候选速度行为的速度较低的区段来将两个候选速度行为聚合(例如形成候选速度行为的合成);即在s90和s91之间,候选速度行为954可以优先于其它候选速度行为,而在s91和s92之间,候选速度行为952可以优先于其它候选速度行为,得到标绘图960中示出的聚合的确定速度行为962。
105.通常,速度行为规划器可以进行各种操作以根据将应用于位置区段的给定位置处的两个或更多个其它候选速度行为来形成确定速度行为。
106.在一些实现中,行为规划处理可以包括排队处理。参考标绘图950,当av系统在s90处时,速度行为规划器可以使用队列来保持两个候选速度行为952和954。当av系统沿着道
路行驶时,速度行为规划器可以检查当前队列以基于标准(例如哪个候选速度行为最受限等)最优地确定将哪个候选速度行为或候选速度行为的哪些部分用作确定速度行为。例如,在s90和s91期间,速度行为规划器可以核查队列以选择候选速度行为954,并且在s91和s92期间,选择候选速度行为952。可以使用其它标准做出选择。并且排队处理可以应用于多于两个的不同候选速度行为。
107.速度行为规划处理的实现可以包括:生成可用且适当并且能够由av系统遵守的候选速度行为和确定速度行为。尽管速度行为推导可以去除候选速度行为中的不连续,但根据给定候选速度行为驱动av系统可能引起不舒适或机械故障。例如,如果av系统以严格遵循标绘图960中的候选速度行为962的速度来行驶,则其减速度将在位置s91处展现出不连续。因此,速度行为规划器可以通过对加速和减速进行平滑处理来生成确定速度行为。为了该目的,速度行为规划器可以存用于储限定可用速度行为的特征的标准和规则,并且应用它们来形成确定速度行为。
108.在一些实现中,速度行为规划可以包括优化算法。优化可以针对存在多个速度行为因素的道路区段搜索确定速度行为。例如,不连续可能跨候选速度行为而存在,并且可以调用优化算法来去除不连续。在一些实例中,在道路区段中或者时间段中,两个或更多个候选速度行为可以交叉,因此可以调用优化算法来识别贯穿该道路区段的最佳速度行为。
109.优化可以将速度行为因素视为硬速度行为因素或软速度行为因素,或者视为部分硬速度行为因素和部分软速度行为因素。例如在图10中,在标绘图1000中推导候选速度行为(实线1002)。在将速度行为视为硬速度行为因素的情况下,最佳地生成的确定速度行为(例如,虚线1004或1008)不可能超过硬速度行为因素。对于被视为软速度行为因素的速度行为因素,尽管整个确定速度行为优选地位于与软速度行为因素相关联的候选速度行为以下,但最佳的确定速度行为(例如,虚线1006)可以部分地超过候选速度行为。
110.优化算法的实现可以使给定的速度行为因素放宽松。在一些情况下,将速度行为因素视为硬速度行为因素可能导致在优化步骤中无解。当出现无解时,优化算法可以使硬速度行为因素放宽松;例如,可以代替地将速度行为视为软速度行为因素。在一些实现中,可以将速度行为因素的一个或多个部分视为软速度行为因素。在一些应用中,可以将整个速度行为因素视为软约束。
111.速度行为规划器所执行的优化算法的实现可以考虑速度、加速度(即速度相对于时间的一阶导数)、加加速度(jerk)(即速度相对于时间的二阶导数)、三阶加速度(jounce)(即速度相对于时间的三阶导数)、四阶加速度(snap)(即速度相对于时间的四阶导数)、五阶加速度(crackle)(即速度相对于时间的五阶导数)、或速度相对于时间的更高阶导数、或它们的组合的全局或局部平滑度。
112.优化算法的实现可以搜索接近给定速度行为的确定速度行为。例如在图10中,在优化处理期间,速度行为1008可以是比速度行为1004更好的解决方案。类似地,速度行为1006可以是比速度行为1008更好的解决方案,这是因为与速度行为1008相比,速度行为1006相对于速度行为1002而言偏离地更少。然而,如果优化对速度行为实施硬约束,那么速度行为1008可以是比速度行为1006更好的解决方案。
113.优化算法的实现可以考虑使行驶时间最小化,该行驶时间可以被表达为速度的函数。例如,基于关系:距离=速度
×
时间,速度和时间是成反比的。因此,在比较标绘图1000
中的两个候选速度行为1004和1008时,候选速度行为1008比候选速度行为1004花费更少的时间到达终点位置s100,因此,候选速度行为1008可以成为优选的确定速度行为。在另一示例中,可以在时间域中呈现速度行为,诸如图10的标绘图1010等。可以生成两个候选速度行为1012和1014。候选速度行为1012可以比候选速度行为1014花费更多的时间来使av系统停止。在使行驶时间最小化时,候选速度行为1014是优化中的优选解决方案(确定速度行为)。
114.优化算法的实现可以考虑使行驶距离最大化,该行驶距离可以被表达为速度的函数。在将时间视为常变量的情况下,关系:距离=速度
×
时间意味着搜索与速度行为因素所设置的速度限制接近的速度行为等同于使行驶距离最大化。例如,对于驱动av系统的时间段(例如,5秒),优化算法可以使距离最大化来识别最佳的确定速度行为。参考标绘图1010,对于t100之前的时间段,使距离最大化是将速度行为的曲线之下的面积最大化,因此候选行为1012是优化中的优选解决方案(确定速度行为)。
115.另一示例是基于图10的标绘图1020。s100处的速度行为因素可能要求av系统停止。可以生成两个候选速度行为1022和1024。候选速度行为1022可以使av系统在位置s100的正前方几乎停止,而候选速度行为1024可以导致av系统更快地减速并且在位置s100之前停止。在使行驶距离最大化的情况下,候选速度行为1022是优化中的优选解决方案(确定速度行为)。
116.优化算法的实现可以考虑过去的速度行为或者先前生成的确定速度行为,或者这两者。图11示出了示例。在时间t1,标绘图1100示出了得到av系统遵循的确定速度行为1102的速度行为因素s110。在稍后的时间t2,如标绘图1110所示,av系统到达位置s111;可以推导出新的候选速度行为1104,并且可以触发速度行为规划器搜索其它最佳的确定速度行为。在该示例中,优化可以考虑位置s111处的当前驱动速度并且生成新的确定速度行为1106。从位置s111开始,av系统可以丢弃旧的确定速度行为1102并且遵循新的确定速度行为1106。
117.优化算法的实现可以使用线性编程、非线性编程或动态编程、或者它们的组合。
118.在一些实现中,速度行为规划可以重复地执行上述的任务和处理;该重复可以按时间发生或按空间发生,或者按这两者发生。速度行为规划处理可以使时间域离散化。因此,可以至少或至多按照1hz、2hz、3hz、4hz、5hz、10hz、15hz、20hz、30hz、40hz、50hz、60hz、70hz、80hz、90hz、100hz、200hz、300hz、400hz、500hz、600hz、700hz、800hz、900hz、或者1k hz来进行规划处理的执行。类似地,速度行为规划处理可以使空间域离散化。参考图12,当考虑轨线1200时,速度行为规划可以使轨线1200离散化,并且相对于离散化后的空间点(例如,1204、1206和1208)各自执行速度行为规划。可以在每次av靠近接下来的1、2、3、4、5、6、7、8、9、或10个空间点时进行速度行为因素的识别。由离散化得到的这些点可以被均匀地隔开或者随机地隔开、或者这两者。两个相邻的离散化后的点之间的距离可以至少或至多是1cm、5cm、10cm、20cm、30cm、40cm、50cm、60cm、70cm、80cm、90cm、1m、5m、或10m。
119.在一些实现中,速度行为规划器可以针对随后的道路区段(例如,至少或至多1cm、5cm、10cm、20cm、30cm、40cm、50cm、60cm、70cm、80cm、90cm、1m、5m、或10m)规划av系统的速度行为(例如,搜索候选速度行为或确定速度行为或这两者)。在一些实现中,速度行为规划器可以针对随后的时间段(例如,至少或至多1秒、2秒、3秒、4秒、5秒、6秒、7秒、8秒、9秒、10秒、20秒、30秒、40秒、50秒、60秒、70秒、80秒、90秒、100秒、110秒、或120秒)规划av系统的速度
行为(例如,搜索候选速度行为或确定速度行为或这两者)。考虑到规划的速度行为和规划的轨线,速度行为规划器可以监视av系统是否遵循所规划的轨线上的所规划的速度行为。如果有偏离,则av系统的动作控制器可以包括反馈控制机制来操纵av系统遵循所规划的速度行为或所规划的轨线或这两者。
120.在一些实现中,速度行为规划器可以从动作规划器接收两个或更多个轨线。这两个或更多个轨线可以是独立的、并行的、彼此交叉的、合并的或分支的,或它们的组合。例如,图12示出在点1204处从轨线1220分支的两个轨线。可以针对两个轨线各自执行速度行为规划。在一些情况下,如果av系统选择多个轨线中的一个轨线(例如1200)以沿途行驶,那么可以丢弃从其它轨线(例如1220)推导得到的候选和确定的速度行为。在该过程期间,速度行为规划器可以沿着给定轨线中的每条轨线考虑一个或多个速度行为(可以包括候选速度行为或确定速度行为或这两者),并将速度行为发送至动作规划器。动作规划器可以使用速度行为以最佳地确定哪条轨线对于av系统行驶来说是优选的轨线。换句话说,在一些实现中,是动作规划器而非速度行为规划器最终从两个或更多个候选轨线中选择确定的轨线。
121.在一些实现中,速度行为规划可以包括排队处理。参考标绘图1250,假定轨线被离散化,并且离散化点是s121、s122、s123和s124。当av系统到达s121时,可以推导新的候选速度行为1252。当av系统到达s122时,可以推导另一新的候选速度行为1254。速度行为规划器可以考虑最受限制的候选速度行为(即1252),并丢弃其它。在一些情况下,并没有丢弃不太受限制的候选速度行为,而是由速度行为规划器将它们放置在队列中以供将来使用。例如,av系统可以到达更远的位置s123,在该位置s123生成新的候选速度行为1256。队列可以存储候选速度行为1256、1252和1254。队列中的速度行为的顺序可以是随机的或者是基于度量的。例如,队列可以从最低分(例如,基于速度、时间、距离、加速度或加加速度、或它们的组合)向最高分对候选速度行为排序,反之亦然。在1250的标绘图中,在s123处,队列可以被配置为以1256、1252、1254的顺序保持候选速度行为,但是可以在位置s124以1254、1252、1256的顺序而对队列重新排序。
122.在一些实现中,速度行为规划可以包括优化确定的横向速度行为。轨线可以包含弯曲的部分(例如,弯曲、转弯、或者u型转弯),诸如从速度行为将具有横向分量的图12的范围中的1204-1206-1208轨线等。本发明所公开的任何技术均可以适用于搜索确定的横向速度行为。速度行为规划可以在优化解决器中一起优化纵向和横向速度行为,或者可以在两个不同的优化解决器中优化纵向和横向速度行为。
123.在一些实现中,规划处理可以不总是以指定的时间或空间频率运行。在一些情况下,可以在行驶环境中检测到移动物体时触发规划处理。其它速度行为因素可以包括机械问题、特殊的道路特征(例如,上坡、下坡、坑洼或有弯度、或它们的组合)、或特殊的请求(例如,下冰雹、骑行者请求、服务器请求、远程操作人员请求、或警察行动、或它们的组合)或它们的组合。
124.图13示出速度行为规划器的示例性处理流程。速度行为规划器可以初始化一组候选速度行为(1302),并且该组可以为空。速度行为规划器可以(例如从地图数据库1308)接收静态行驶信息、或者(例如从感知处理器1312)接收动态行驶信息,或者这两者。速度行为规划器可以被赋予一个或多个规划的轨线(1304)。在一些情况下,所赋予的轨线可以与静
态行驶信息、动态行驶信息或这两者相结合、与速度行为因素相结合、或者与过去的或当前的或将来的速度行为相结合、或者与它们的组合相结合。例如,轨线规划器可以使用地图来沿着轨线标记速度限制、交通灯、交通标志或车道标记的位置,这提供候选速度行为的先验信息。速度行为规划器可以使用各种信息在给定的轨线上生成候选速度行为(1310)。在一些实现中,输出可以被发送至轨线规划器1316,轨线规划器1316可以估计候选速度行为以调整所规划的轨线1304。在一些实现中,输出可以被发送至动作控制器1314,动作控制器1314可以控制av系统沿着所规划的轨线以追随速度行为的速度来行驶。av系统可以记录所追随的轨线1306,并且速度行为规划器可以在速度行为规划处理中使用所追随的轨线。
125.在最后的步骤1320中,速度规划处理的结果可以被传送至下一次迭代,并且可以成为初始的一组候选速度行为的一部分。继续该迭代直到av系统到达终点位置为止。
126.其它实现(例如,方法、软件、移动应用程序、操作系统、用户接口、仿真、视频游戏、硬件、电子设备、全球定位系统、电子电路、现场可编程门阵列、或专用集成电路,或它们的组合)也在权利要求的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1