自动驾驶驱动制动标定表的处理方法、装置及移动工具与流程
本发明涉及自动驾驶,尤其涉及一种自动驾驶驱动制动标定表的处理方法、装置及移动工具。
背景技术:
1、自动驾驶车辆驱动制动特性的标定对于车辆的稳定性、舒适性、快速性以及准确性都有着至关重要的作用。现有自动驾驶车辆驱动制动标定表的制作都是将速度、加速度、驱动扭矩/制动压力做到同一张二维表上,如下表1所示,其中,a表示加速度,单位m/s2,v表示速度,单位m/s。根据加速度和速度通过双线性插值查取表1时,当查取的值t大于0时表示驱动执行器起作用,当查取的值t小于0时表示制动执行器起作用。为了防止驱动执行器与制动执行器频繁的切换,一般会在驱动与制动之间增加一个滞环[-m,n],当查表t>n时,为驱动模式,当查表t<-m时,为制动模式,当t∈[-m,n]时,执行器模式保持上次的值。
2、将驱动与制动标定到一张二维表并采取滞环的方法防止执行器频繁切换的方法存在以下缺点:当滞环设置区间过小时,执行器频繁切换影响舒适性;当滞环设置区间过大时,在大多数场景可以减少执行器切换,但在某些坡度的坡道场景仍然会出现执行器频繁切换的现象,并且滞环设置过大时会造成跟踪延时的增大、跟踪精度的降低。
3、
4、表1
技术实现思路
1、本发明的目的是针对现有技术所存在的缺陷,提供一种自动驾驶驱动制动标定表的处理方法、装置及移动工具,将自动驾驶车辆的驱动和制动特性分别进行标定,可以解决执行器频繁切换的问题,提高执行器响应的速度,从而提高自动驾驶车辆的舒适性。
2、为实现上述目的,本发明第一方面,提供一种自动驾驶驱动制动标定表的处理方法,所述处理方法包括:
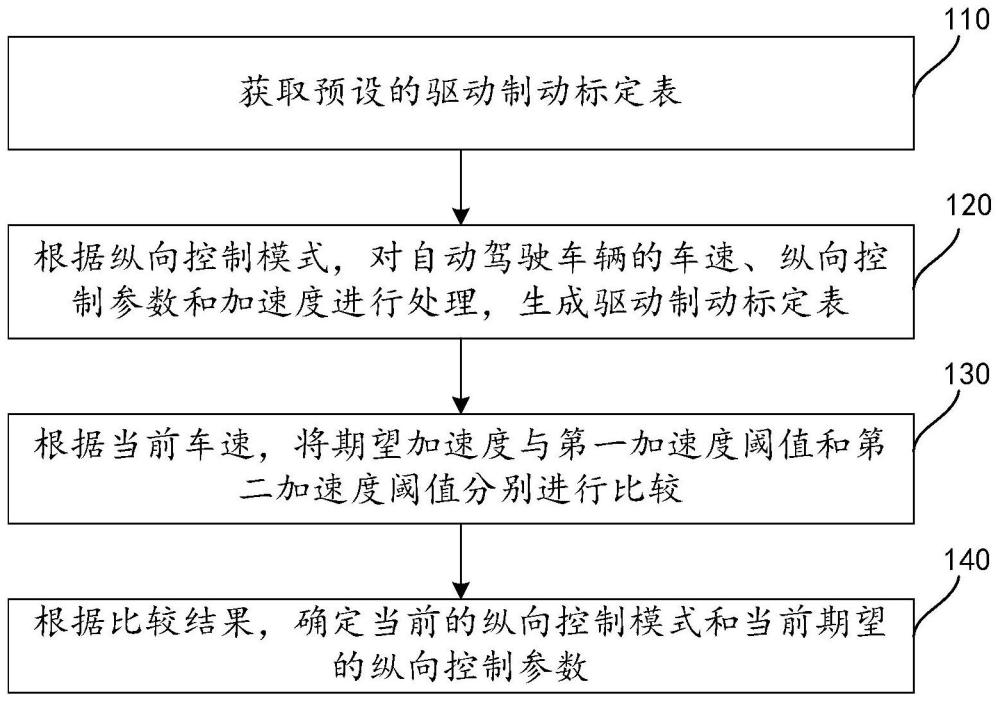
3、获取预设的驱动制动标定表;所述预设的驱动制动标定表包括预设的驱动标定表和预设的制动标定表;
4、根据所述预设的驱动制动标定表,提取第一加速度阈值和第二加速度阈值;
5、根据当前车速,将期望加速度与所述第一加速度阈值和第二加速度阈值分别进行比较;
6、根据比较结果,确定当前期望的纵向控制模式和当前期望的纵向控制参数;所述纵向控制参数包括驱动参数和制动参数。
7、本发明第二方面,提供一种自动驾驶驱动制动标定表的处理装置,包括:
8、获取模块,用于获取预设的驱动制动标定表;所述预设的驱动制动标定表包括预设的驱动标定表和预设的制动标定表;
9、提取模块,用于根据所述预设的驱动制动标定表,提取第一加速度阈值和第二加速度阈值;
10、比较模块,用于根据当前车速,将期望加速度与所述第一加速度阈值和第二加速度阈值分别进行比较;
11、确定模块,用于根据比较结果,确定当前期望的纵向控制模式和当前期望的纵向控制参数;所述纵向控制参数包括驱动参数和制动参数。
12、本发明第三方面,提供一种计算机服务器,包括:存储器、处理器和收发器;
13、所述处理器用于与所述存储器耦合,读取并执行所述存储器中的指令,以实现上述第一方面任一项所述的处理方法;
14、所述收发器与所述处理器耦合,由所述处理器控制所述收发器进行消息收发。
15、本发明第四方面,提供一种芯片系统,包括处理器,所述处理器与存储器耦合,所述存储器存储有程序指令,当所述存储器存储的程序指令被所述处理器执行时实现上述第一方面任一项所述的处理方法。
16、本发明第五方面,提供一种计算机系统,包括存储器,以及与所述存储器通信连接的一个或多个处理器;
17、所述存储器中存储有可被所述一个或多个处理器执行的指令,所述指令被所述一个或多个处理器执行,以使所述一个或多个处理器实现如上述第一方面任一项所述的处理方法。
18、本发明第六方面,提供一种移动工具,包括上述第三方面所述的计算机服务器。
19、本发明实施例提供的自动驾驶驱动制动标定表的处理方法,通过设置驱动标定表和制动标定表,将自动驾驶车辆的驱动特性和制动特性分别进行了标定,并且根据当前车速、期望加速度和两个标定表进行匹配,可以确定自动驾驶车辆当前期望的纵向控制模式和纵向控制参数,从而实现了对自动驾驶车辆的执行器的切换控制,该方法解决了执行器频繁切换的问题,提高了执行器响应的速度,从而提高了自动驾驶车辆的舒适性。
技术特征:
1.一种自动驾驶驱动制动标定表的处理方法,其特征在于,所述处理方法包括:
2.根据权利要求1所述的处理方法,其特征在于,所述根据比较结果,确定当前期望的纵向控制模式和当前期望的纵向控制参数,具体包括:
3.根据权利要求2所述的处理方法,其特征在于,所述根据比较结果,确定当前期望的纵向控制模式和当前期望的纵向控制参数,具体还包括:
4.根据权利要求3所述的处理方法,其特征在于,当所述上一次的纵向控制模式为驱动模式/制动模式时,所述处理方法还包括:
5.根据权利要求1所述的处理方法,其特征在于,所述获取预设的驱动制动标定表之前,还包括:
6.一种自动驾驶驱动制动标定表的处理装置,其特征在于,包括:
7.一种计算机服务器,其特征在于,包括:存储器、处理器和收发器;
8.一种芯片系统,其特征在于,包括处理器,所述处理器与存储器耦合,所述存储器存储有程序指令,当所述存储器存储的程序指令被所述处理器执行时实现权利要求1-5任一项所述的处理方法。
9.一种计算机系统,其特征在于,包括存储器,以及与所述存储器通信连接的一个或多个处理器;
10.一种移动工具,其特征在于,包括上述权利要求7所述的计算机服务器。
技术总结
本发明实施例涉及一种自动驾驶驱动制动标定表的处理方法,包括:获取预设的驱动制动标定表;预设的驱动制动标定表包括预设的驱动标定表和预设的制动标定表;根据预设的驱动制动标定表,提取第一加速度阈值和第二加速度阈值;根据当前车速,将期望加速度与第一加速度阈值和第二加速度阈值分别进行比较;根据比较结果,确定当前期望的纵向控制模式和当前期望的纵向控制参数;纵向控制参数包括驱动参数和制动参数。
技术研发人员:张亭
受保护的技术使用者:武汉智行者科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!