智能车灯系统的投影控制方法、装置、设备和系统与流程
本申请涉及智能驾驶,特别是涉及一种智能车灯系统的投影控制方法、装置、控制设备、智能车灯系统、存储介质和计算机程序产品。
背景技术:
1、智能驾驶领域中,随着新技术喷薄而出,智能车灯系统是一重要产物。在智能车灯系统中,车灯的像素也逐步在增加,由于车灯的像素提升,智能车灯系统能通过投影表达更多的信息,从而辅助驾驶。
2、当需投影的信息多种多样时,现有技术难以快速且有序地处理多种多样的信息。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种智能车灯系统的投影控制方法、装置、控制设备、智能车灯系统、存储介质和计算机程序产品。
2、本申请提供一种智能车灯系统的投影控制方法,所述方法包括:
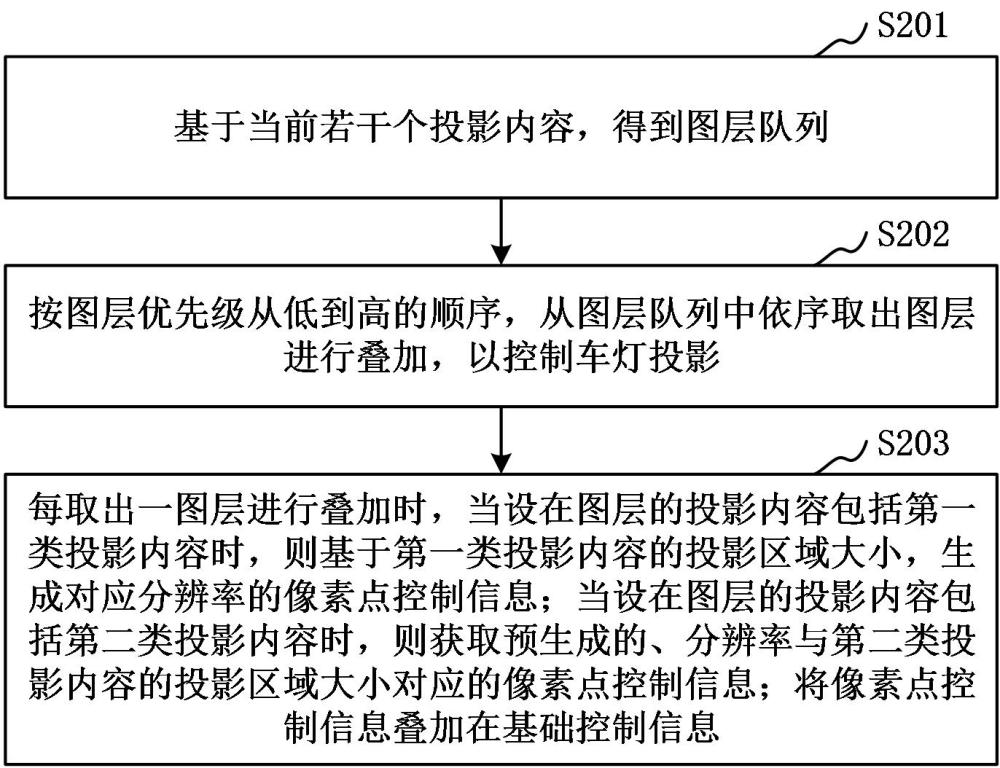
3、基于当前若干个投影内容,得到图层队列;
4、按图层优先级从低到高的顺序,从所述图层队列中依序取出图层进行叠加,以控制车灯投影;
5、每取出一图层进行叠加时,当设在所述图层的投影内容包括第一类投影内容时,则基于所述第一类投影内容的投影区域大小,生成对应分辨率的像素点控制信息;当设在所述图层的投影内容包括第二类投影内容时,则获取预生成的、分辨率与第二类投影内容的投影区域大小对应的像素点控制信息;将所述像素点控制信息叠加在基础控制信息;
6、其中,所述第一类投影内容的投影区域大小随道路目标在投影域中的大小变化,所述第二类投影内容的投影区域大小不随道路目标在投影域中的大小变化。
7、在一个实施例中,将所述像素点控制信息叠加在基础控制信息,包括:
8、基于投影内容的投影区域位置,确定所述像素点控制信息的叠加位置;
9、按所述叠加位置,将所述像素点控制信息叠加至基础控制信息。
10、在一个实施例中,在基于投影内容的投影区域位置,确定所述像素点控制信息的叠加位置之前,所述方法还包括:
11、根据智能车灯系统的当前感知数据,确定所述道路目标在投影域中的位置;
12、基于所述道路目标在投影域中的位置,确定所述第一类投影内容的投影区域位置。
13、在一个实施例中,按所述叠加位置,将所述像素点控制信息叠加至基础控制信息,包括:
14、获取所述像素点控制信息的第一一维数组以及所述基础控制信息的第二一维数组;
15、按所述叠加位置,将所述第一一维数组叠加至所述第二一维数组。
16、在一个实施例中,所述方法还包括:
17、根据智能车灯系统的当前感知数据,确定所述道路目标在投影域中的大小;
18、根据所述道路目标在投影域中的大小,确定所述第一类投影内容的投影区域大小。
19、在一个实施例中,基于当前若干个投影内容,得到图层队列,包括:
20、基于各投影内容的重要度,将各投影内容设在对应优先级的图层,得到多个图层;
21、基于图层各自的优先级,生成图层队列。
22、在一个实施例中,基于各投影内容的重要度,将各投影内容设在对应优先级的图层,包括:
23、当至少两个投影内容的重要度相同时,将所述至少两个投影内容融合在对应优先级的同一图层。
24、本申请提供一种智能车灯系统的投影控制装置,所述装置包括:
25、队列生成模块,用于基于当前若干个投影内容,得到图层队列;
26、叠加模块,用于按图层优先级从低到高的顺序,从所述图层队列中依序取出图层进行叠加,以控制车灯投影;
27、每取出一图层进行叠加时,所述叠加模块,还用于:当设在所述图层的投影内容包括第一类投影内容时,则基于所述第一类投影内容的投影区域大小,生成对应分辨率的像素点控制信息;当设在所述图层的投影内容包括第二类投影内容时,则获取预生成的、分辨率与第二类投影内容的投影区域大小对应的像素点控制信息;将所述像素点控制信息叠加在基础控制信息;
28、其中,所述第一类投影内容的投影区域大小随道路目标在投影域中的大小变化,所述第二类投影内容的投影区域大小不随道路目标在投影域中的大小变化。
29、本申请提供一种控制设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行上述方法。
30、本申请提供一种智能车灯系统,所述系统包括感知器、车灯和如上述实施例所述的控制设备。
31、本申请提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行上述方法。
32、本申请提供一种计算机程序产品,其上存储有计算机程序,所述计算机程序被处理器执行上述方法。
33、上述智能车灯系统的投影控制方法、装置、控制设备、智能车灯系统、存储介质和计算机程序产品,基于当前若干个投影内容,得到图层队列;按图层优先级从低到高的顺序,从图层队列中依序取出图层进行叠加,可以有序处理多种多样的投影内容,从而基于叠加得到的控制信息,控制车灯投影;并且,每取出一图层进行叠加时,当设在图层的投影内容包括投影区域大小随道路目标在投影域中的大小变化的第一类投影内容时,则基于第一类投影内容的投影区域大小,生成对应分辨率的像素点控制信息,以使车灯投影出的第一投影内容的投影区域大小可以适应道路目标在投影域中的当前大小;当设在图层的投影内容包括第二类投影内容时,由于第二类投影内容的投影区域大小不随道路目标在投影域中的大小变化,可以预先给第二类投影内容设定投影区域大小,预先生成分辨率与该投影区域大小对应的像素点控制信息,在使用过程中,可以直接获取该像素点控制信息,缩短处理时间,从而快速地完成叠加处理,快速投影,减少智能车灯系统的感知端到车灯端的时延。
技术特征:
1.一种智能车灯系统的投影控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,将所述像素点控制信息叠加在基础控制信息,包括:
3.根据权利要求2所述的方法,其特征在于,在基于投影内容的投影区域位置,确定所述像素点控制信息的叠加位置之前,所述方法还包括:
4.根据权利要求2所述的方法,其特征在于,按所述叠加位置,将所述像素点控制信息叠加至基础控制信息,包括:
5.根据权利要求1至4任一项所述的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,基于当前若干个投影内容,得到图层队列,包括:
7.根据权利要求6所述的方法,其特征在于,基于各投影内容的重要度,将各投影内容设在对应优先级的图层,包括:
8.一种智能车灯系统的投影控制装置,其特征在于,所述装置包括:
9.一种控制设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法。
10.一种智能车灯系统,其特征在于,所述系统包括感知器、车灯和如权利要求9所述的控制设备。
技术总结
本申请涉及智能驾驶技术领域,提供一种智能车灯系统的投影控制方法、装置、设备和系统,可快速有序地处理多种投影内容。本申请基于若干个投影内容,得到图层队列;按图层优先级从低到高的顺序,从图层队列中依序取出图层进行叠加,以控制车灯投影;每取出一图层进行叠加时,当设在图层的投影内容包括第一类投影内容时,则基于第一类投影内容的投影区域大小,生成对应分辨率的像素点控制信息;当设在图层的投影内容包括第二类投影内容时,则获取预生成的像素点控制信息;将像素点控制信息叠加在基础控制信息;第一类投影内容的投影区域大小随道路目标在投影域中的大小变化,第二类投影内容的投影区域大小不随道路目标在投影域中的大小变化。
技术研发人员:刘锦秀,刘浩斌,周涤非
受保护的技术使用者:深圳市欧冶半导体有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!