用于确定车辆的参考车速的单元和方法与流程
本技术涉及车辆后轮转向,更具体地,涉及用于确定车辆的参考车速的单元和方法,这样的参考车速适用于计算用于车辆的多个车轮中的后轮的期望转角。
背景技术:
1、随着现代车辆技术的发展和道路条件的改善,对于车辆的舒适性、操控性以及安全性的要求越来越高,为了改善车辆的转弯灵活性、车辆直线行驶的稳定性、以及车辆的舒适性等,在车辆中应用了后轮随动转向技术。换言之,通过利用后轮随动转向技术,在车辆低速或出现转向不足时后轮与前轮呈反向转动,以达到减小转弯半径而提高车辆灵活性的目的,而在车辆呈转向过度尤其是高速甩尾的趋势时,后轮与前轮呈同向转动,以平缓地变道。
2、一般而言,车辆的rws(rear wheel steering:后轮转向)控制用ecu(electroniccontrol unit:电子控制单元)通过例如can总线从车辆其他相关ecu获取车速、方向盘角度、侧纵向加速度、横摆角速度等,以用于计算适配于车辆的当前行驶状况的后轮的期望转角,并且控制后轮转向装置以致使后轮转向至所述期望转角。来自车辆其他相关ecu的车速通常为车辆的多个车轮的轮速大小的平均值,且通过与多个车轮中的相应车轮相关联的轮速传感器检测相应车轮的轮速大小,以产生以轮速信号的形式传递的轮速检测值。一方面,由轮速传感器产生的轮速检测值会存在误差,另一方面,在轮速信号的传递过程中也可能发生信号丢失或延迟,导致在当前周期中的轮速检测值相对于在上一周期中的轮速检测值不合理地波动,而rws控制用ecu通过基于这样的轮速检测值计算的车速来计算后轮的期望转角,易于导致后轮的期望转角突变,降低驾驶舒适性,甚至造成安全隐患。
技术实现思路
1、本技术的一个目的是提供用于确定车辆的参考车速的单元和方法,参考车速适用于计算用于车辆的多个车轮中的后轮的期望转角,因为这样的参考车速既能合理表征车辆的当前行驶状况,又能通过自身的平稳变化来抑制后轮的期望转角突变。
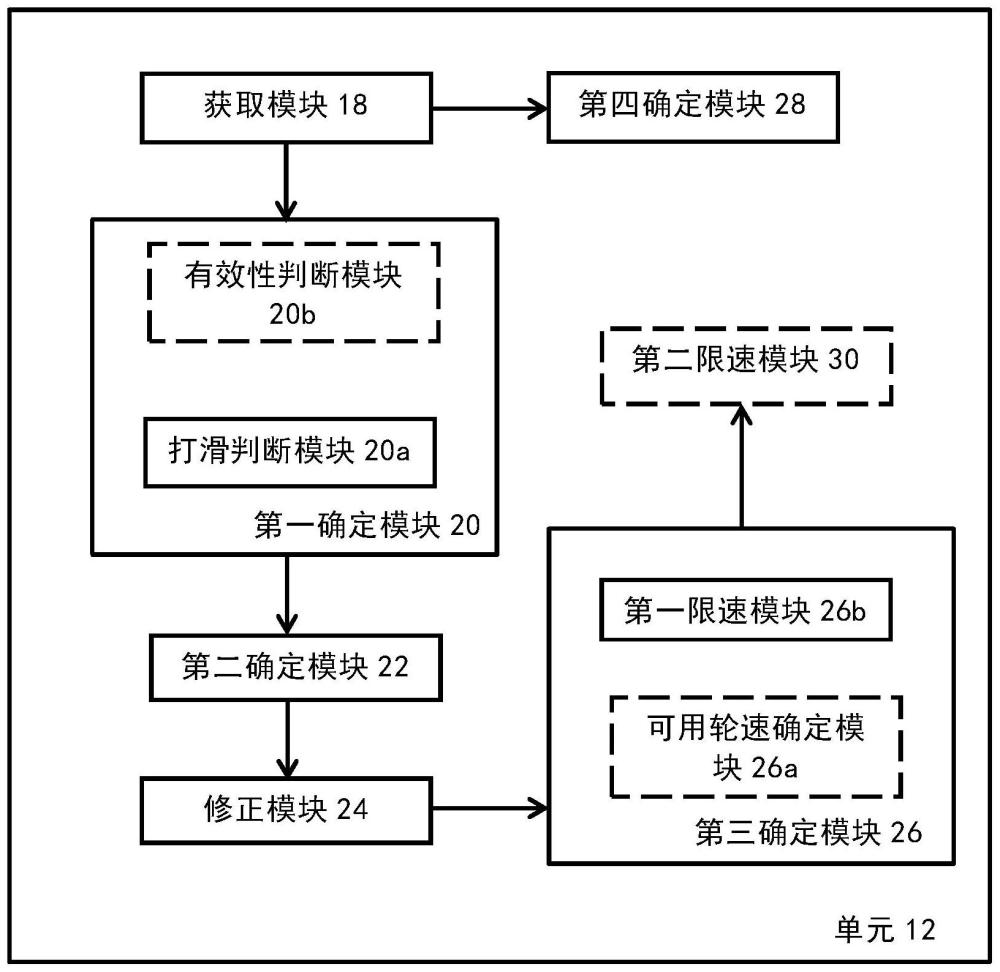
2、根据本技术的一个方面,提供一种用于确定车辆的参考车速的单元,所述参考车速适用于计算用于所述车辆的多个车轮中的后轮的期望转角,其中,所述单元包括:获取模块,其配置成从与所述多个车轮中的相应车轮相关联的轮速传感器获取相应车轮在每一周期中的轮速检测值和轮向检测值;第一确定模块,其配置成基于相应车轮在当前周期中的轮速检测值相对于在上一周期中的轮速检测值的检测值变化率来确定相应车轮在当前周期中的轮速检测值是否正常,其中,当相应车轮在当前周期中的轮速检测值为不正常时,以相应车轮在上一周期中的轮速检测值作为相应车轮在当前周期中的轮速检测值;第二确定模块,其配置成基于相应车轮在当前周期中的轮速检测值来确定相应车轮在当前周期中的轮速转换值,以表示在将相应车轮的轮速转换至车辆质心时产生的质心速度大小;修正模块,其配置成修正相应车轮在当前周期中的轮速转换值,以产生相应车轮在当前周期中的轮速修正值;第三确定模块,其配置成基于每个车轮在当前周期中的轮速修正值来确定在当前周期中的参考车速大小;以及第四确定模块,其配置成基于每个车轮在当前周期中的轮向检测值来确定在当前周期中的参考车速方向。
3、可选地,获取模块配置成:从所述轮速传感器获取相应车轮在每一周期中的轮速检测值的有效性值,并且第一确定模块配置成:在基于相应车轮在当前周期中的轮速检测值相对于在上一周期中的轮速检测值的检测值变化率来确定相应车轮在当前周期中的轮速检测值是否正常之前,基于相应车轮在当前周期中的轮速检测值的有效性值来确定相应车轮在当前周期中的轮速检测值是否有效,其中,当相应车轮在当前周期中的轮速检测值为无效时,以相应车轮在上一周期中的轮速检测值作为相应车轮在当前周期中的轮速检测值。
4、可选地,获取模块配置成:从与所述车辆的方向盘相关联的方向盘转角传感器获取在每一周期中的方向盘转角检测值;以及从与所述车辆的后轮转向装置相关联的后轮转向装置位移传感器获取在每一周期中的后轮转向装置位移检测值;并且第二确定模块配置成:基于在当前周期中的方向盘转角检测值来确定在当前周期中的前轮转角值,基于在当前周期中的后轮转向装置位移检测值来确定在当前周期中的后轮转角值,并且基于在当前周期中的前轮转角值、在当前周期中的后轮转角值、以及相应车轮在当前周期中的轮速检测值来确定相应车轮在当前周期中的轮速转换值。
5、可选地,获取模块配置成:从所述轮速传感器获取相应车轮在每一周期中的加速度检测值;以及从与所述车辆的底盘相关联的横摆角速度传感器获取在每一周期中的横摆角速度检测值,并且修正模块配置成:基于相应车轮在当前周期中的加速度检测值和横摆角速度检测值来确定相应车轮在当前周期中的加速度转换值,以表示在将相应车轮的加速度转换至车辆质心时产生的质心加速度大小;以及利用卡尔曼滤波算法基于相应车轮在当前周期中的加速度转换值修正相应车轮在当前周期中的轮速转换值。
6、可选地,修正模块配置成:利用卡尔曼滤波算法的预测模型基于相应车轮在当前周期中的加速度转换值来确定相应车轮在当前周期中的轮速预测值,以及利用卡尔曼滤波算法的更新模型基于相应车轮在当前周期中的轮速转换值和轮速预测值来确定相应车轮在当前周期中的轮速修正值,其中,当获取模不能从所述轮速传感器获取到相应车轮在当前周期中的轮速检测值时,以相应车轮在当前周期中的轮速预测值作为轮速修正值。
7、可选地,第三确定模块配置成:计算所述多个车轮在当前周期中的轮速修正值的第一平均值;以及基于第一平均值相对于在上一周期中的参考车速大小的车速变化率来确定以第一平均值或以在上一周期中的参考车速大小相对于可接受的最大车速变化率改变的车速值作为在当前周期中的参考车速大小。
8、可选地,第三确定模块配置成:计算所述多个车轮在当前周期中的轮速修正值的第一平均值;基于每个车轮在当前周期中的轮速修正值相对于第一平均值的修正值变化率来确定每个车轮的轮速修正值是否可用于确定在当前周期中的参考车速大小;计算所有可用于确定在当前周期中的参考车速大小的轮速修正值的第二平均值;以及基于第二平均值相对于在上一周期中的参考车速大小的车速变化率来确定以第二平均值或以在上一周期中的参考车速大小相对于可接受的最大车速变化率改变的车速值作为在当前周期中的参考车速大小。
9、可选地,所述单元还包括限速模块,限速模块配置成:当基于在当前周期中的参考车速大小所计算的参考横摆角速度大于在当前周期中的横摆角速度检测值乘以安全系数时,以在上一周期中的参考车速大小相对于可接受的最大车速变化率改变的车速值作为在当前周期中的参考车速大小。
10、可选地,第四确定模块配置成通过以下中的至少一项来确定在当前周期中的参考车速方向:当所述多个车轮中的三个或多于三个车轮在当前周期中的轮向检测值为正时,判断当前周期中的参考车速方向为正;当所述多个车轮中的三个或多于三个车轮在当前周期中的轮向检测值为反时,判断当前周期中的参考车速方向为反;当所述多个车轮中的两个车轮在当前周期中的轮向检测值为正且另外两个车轮在当前周期中的轮向检测值为反时,使用在上一周期中的参考车速方向作为在当前周期中的参考车速方向;以及当获取模块不能从所述轮速传感器获取到相应车轮在当前周期中的轮向检测值时,以相应车轮在上一周期中的轮向检测值作为相应车轮在当前周期中的轮向检测值。
11、根据本技术的另一方面,提供一种用于确定车辆的参考车速的方法,所述参考车速适用于计算用于所述车辆的多个车轮中的后轮的期望转角,可选地利用上述用于确定车辆的参考车速的单元执行所述方法,其中,所述方法包括:从与所述多个车轮中的相应车轮相关联的轮速传感器获取相应车轮在每一周期中的轮速检测值和轮向检测值;基于相应车轮在当前周期中的轮速检测值相对于在上一周期中的轮速检测值的检测值变化率来确定相应车轮在当前周期中的轮速检测值是否正常,其中,当相应车轮在当前周期中的轮速检测值为不正常时,以相应车轮在上一周期中的轮速检测值作为相应车轮在当前周期中的轮速检测值;基于相应车轮在当前周期中的轮速检测值来确定相应车轮在当前周期中的轮速转换值,以表示在将相应车轮的轮速转换至车辆质心时产生的质心速度大小;修正相应车轮在当前周期中的轮速转换值,以产生相应车轮在当前周期中的轮速修正值;基于每个车轮在当前周期中的轮速修正值来确定在当前周期中的参考车速大小;以及基于每个车轮在当前周期中的轮向检测值来确定在当前周期中的参考车速方向。
12、本技术提供的用于确定车辆的参考车速的单元和方法可以在轮速传感器的检测出现误差、信号丢失或延迟而导致轮速检测值波动的情况下,仍确保参考车速可以适用于计算出无明显阶跃的后轮的期望转角,减少由此引起的后轮的偏摆问题,提高后轮转向的平顺性,并且保证整车安全。
13、通过以下参照附图对本技术的示例性实施方式的详细描述,本技术的其它特征及其优点将会变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!