AGV车辆的运输避障方法、装置、设备及存储介质与流程
本申请涉及agv领域,尤其涉及一种agv车辆的运输避障方法、装置、设备及存储介质。
背景技术:
1、目前,amr车辆作为agv车辆的一类,在工业生产过程中发挥巨大作用,amr车辆在运输货物时,会避开周围环境中的障碍物,位于amr车辆上的托盘用于装载货物,amr车辆需要区分托盘支腿与障碍物。
2、现有技术中,amr车辆区分托盘支腿与障碍物时,将扫描得到的点云进行聚类后训练模型以区分托盘支腿点云与障碍物点云,但基于前期扫描的点云,训练模型用于对后续扫描的点云进行区分,存在时延,无法做到实时区分,则基于所述托盘支腿点云进行避障,避障的精度不高,即,现有技术中存在,agv车辆运输时,对所在周围环境进行避障的避障精度不高的问题。
3、上述内容仅用于辅助理解本申请的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种agv车辆的运输避障方法,旨在解决现有技术中,agv车辆运输时,对所在周围环境进行避障的避障精度不高的问题。
2、为实现上述目的,本申请提供一种agv车辆的运输避障方法,应用于agv车辆的运输避障系统中的agv车辆的运输避障装置,所述agv车辆的运输避障系统还包括agv车辆、顶升机构、托盘、障碍物,所述agv车辆的运输避障装置配置有激光雷达,所述agv车辆用于运输货物,所述托盘包括托盘支腿,所述托盘被所述顶升机构顶起,所述agv车辆的运输避障方法,包括:
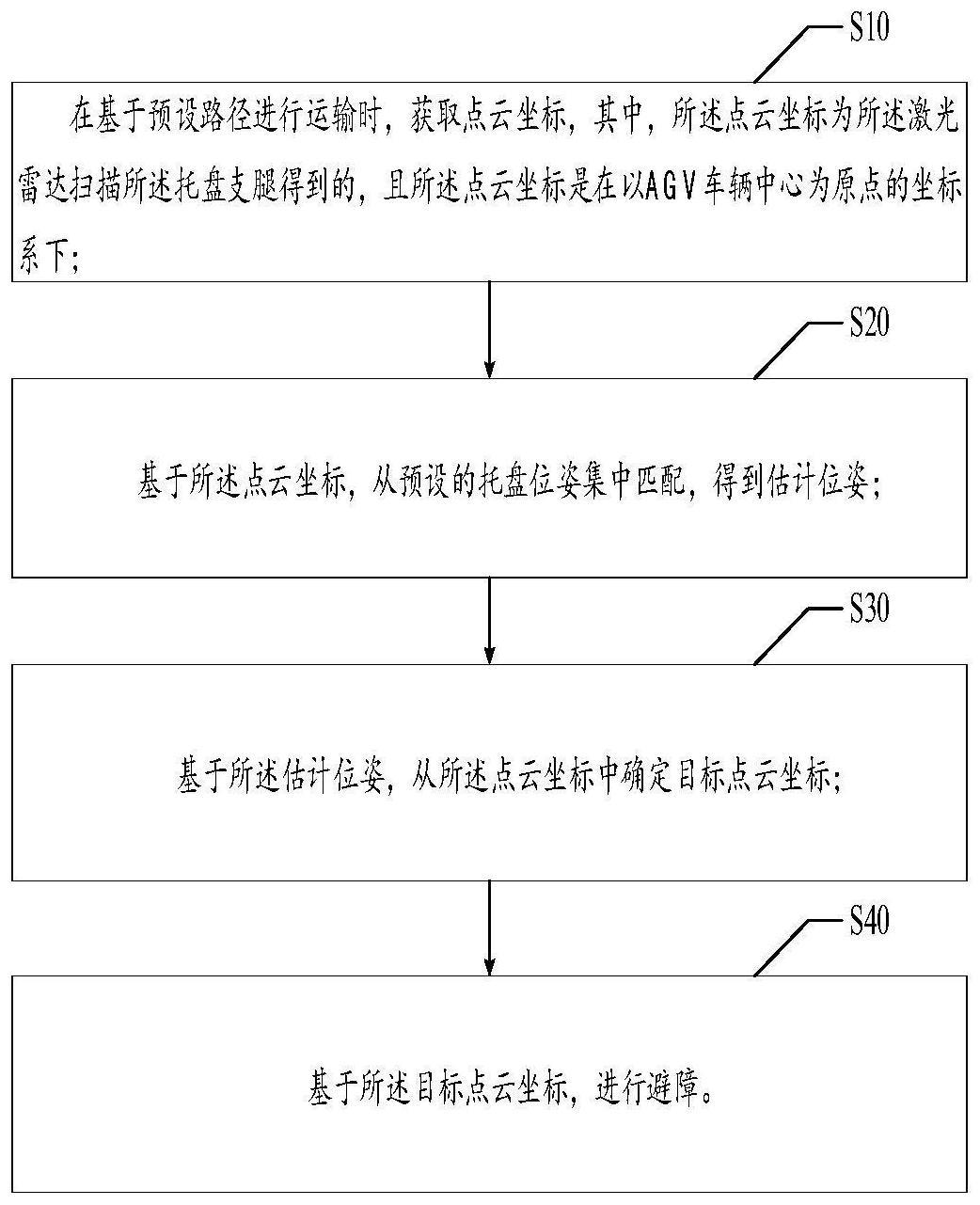
3、在基于预设路径进行运输时,获取点云坐标,其中,所述点云坐标为所述激光雷达扫描所述托盘支腿得到的,且所述点云坐标是在以agv车辆中心为原点的坐标系下;
4、基于所述点云坐标,从预设的托盘位姿集中匹配,得到估计位姿;
5、基于所述估计位姿,从所述点云坐标中确定目标点云坐标;
6、基于所述目标点云坐标,进行避障。
7、在本申请的一种可能的实施方式中,所述基于所述点云坐标,从预设的托盘位姿集中匹配,得到估计位姿的步骤,包括:
8、确定预设的误差范围,其中,所述误差范围为,距离所述agv车辆中心为预设的误差半径的范围,所述误差范围中包含有第一数量的待选托盘中心,每个所述待选托盘中心对应一个托盘位姿,全部待选托盘中心对应的多个托盘位姿组成所述托盘位姿集;
9、对所述点云坐标进行筛选,得到个数为所述第一数量的第一点云,其中,对每个待选托盘中心对应的托盘支腿中心距离为预设托盘支腿半径范围内点云坐标进行保留;
10、基于所述第一点云中携带的点云坐标数量,从所述误差范围内的所述托盘位姿集中匹配,得到估计位姿。
11、在本申请的一种可能的实施方式中,所述基于所述估计位姿,从所述点云坐标中确定目标点云坐标的步骤之后,包括:
12、获取所述托盘几何尺寸;
13、基于所述目标点云坐标,确定托盘估算尺寸;
14、若确定所述托盘估算尺寸与所述托盘几何尺寸不相等,则对所述目标点云坐标进行更新,得到更新后的所述目标点云坐标。
15、在本申请的一种可能的实施方式中,所述基于所述第一点云中携带的点云坐标数量,从所述误差范围内的所述托盘位姿集中匹配,得到估计位姿的步骤,包括:
16、基于所述第一点云中携带的点云坐标数量,对所述第一数量的第一点云按照携带的点云坐标数量从多到少的顺序进行排序,得到所述第一点云的排列顺序;
17、基于所述排列顺序,从所述误差范围内的所述托盘位姿集中匹配,得到估计位姿,其中,确定所述排列顺序中位于第一的所述第一点云对应的位姿为所述估计位姿。
18、在本申请的一种可能的实施方式中,所述若确定所述托盘估算尺寸与所述托盘几何尺寸不相等,则对所述目标点云坐标进行更新,得到更新后的所述目标点云坐标的步骤,包括:
19、若确定所述托盘估算尺寸与所述托盘几何尺寸不相等,则计算所述点云坐标与所述目标点云之间的残差和;
20、确定最小残差和对应的目标点云坐标,为新的目标点云坐标;
21、基于所述新的目标点云坐标,对所述目标点云坐标进行更新,得到更新后的所述目标点云坐标。
22、在本申请的一种可能的实施方式中,所述托盘为矩形托盘,所述托盘几何尺寸包括托盘的长与托盘的宽所述基于所述目标点云坐标,确定托盘估算尺寸的步骤,包括:
23、基于所述目标点云坐标,确定托盘估算尺寸,所述托盘估算尺寸包括托盘估算的长,与托盘估算的宽。
24、在本申请的一种可能的实施方式中,agv车辆为amr车辆。
25、此外,为实现上述目的,本申请还提供一种agv车辆的运输避障装置,所述装置包括:
26、获取模块,用于在基于预设路径进行运输时,获取点云坐标,其中,所述点云坐标为所述激光雷达扫描所述托盘支腿得到的,且所述点云坐标是在以agv车辆中心为原点的坐标系下;
27、匹配模块,用于基于所述点云坐标,从预设的托盘位姿集中匹配,得到估计位姿;
28、确定模块,用于基于所述估计位姿,从所述点云坐标中确定目标点云坐标;
29、避障模块,用于基于所述目标点云坐标,进行避障。
30、此外,为实现上述目的,本申请还提供一种agv车辆的运输避障设备,所述agv车辆的运输避障设备为实体节点设备,所述agv车辆的运输避障设备包括:存储器,处理器及存储在所述存储器上并可在所述处理器上运行的agv车辆的运输避障程序,所述处理器执行所述agv车辆的运输避障程序实现所述agv车辆的运输避障方法的步骤。
31、此外,为实现上述目的,本申请还提供一种存储存储介质,所述存储存储介质上存储有实现agv车辆的运输避障方法的程序,所述agv车辆的运输避障程序被处理器执行时实现上述所述的agv车辆的运输避障方法的步骤。
32、本申请提供一种agv车辆的运输避障方法、装置、设备及存储介质,与现有技术中,agv车辆运输时,对所在周围环境进行避障的避障精度不高的问题相比,在本申请中,在基于预设路径进行运输时,获取点云坐标,其中,所述点云坐标为所述激光雷达扫描所述托盘支腿得到的,且所述点云坐标是在以agv车辆中心为原点的坐标系下;基于所述点云坐标,从预设的托盘位姿集中匹配,得到估计位姿;基于所述估计位姿,从所述点云坐标中确定目标点云坐标。在本申请中,扫描得到托盘支腿的点云坐标后,基于所述点云坐标匹配得到托盘在agv车辆上的当前位姿,根据当前位姿,确定出托盘支腿的点云坐标。其中,基于扫描得到的点云坐标可快速出当前位姿,增强了实时性,避免了训练模型后才可区分支腿点云时的时延问题,即,提高了agv车辆运输时,对所在周围环境进行避障的避障精度。
技术特征:
1.一种agv车辆的运输避障方法,其特征在于,应用于agv车辆的运输避障系统中的agv车辆的运输避障装置,所述agv车辆的运输避障系统还包括agv车辆、顶升机构、托盘、障碍物,所述agv车辆的运输避障装置配置有激光雷达,所述agv车辆用于运输货物,所述托盘包括托盘支腿,所述托盘被所述顶升机构顶起,所述agv车辆的运输避障方法,包括:
2.根据权利要求1所述的agv车辆的运输避障方法,其特征在于,所述基于所述点云坐标,从预设的托盘位姿集中匹配,得到估计位姿的步骤,包括:
3.根据权利要求2所述的agv车辆的运输避障方法,其特征在于,所述基于所述第一点云中携带的点云坐标数量,从所述误差范围内的所述托盘位姿集中匹配,得到估计位姿的步骤,包括:
4.根据权利要求1所述的agv车辆的运输避障方法,其特征在于,所述基于所述估计位姿,从所述点云坐标中确定目标点云坐标的步骤之后,包括:
5.根据权利要求4所述的agv车辆的运输避障方法,其特征在于,所述若确定所述托盘估算尺寸与所述托盘几何尺寸不相等,则对所述目标点云坐标进行更新,得到更新后的所述目标点云坐标的步骤,包括:
6.根据权利要求4所述的agv车辆的运输避障方法,其特征在于,所述托盘为矩形托盘,所述托盘几何尺寸包括托盘的长与托盘的宽,所述基于所述目标点云坐标,确定托盘估算尺寸的步骤,包括:
7.根据权利要求1所述的agv车辆的运输避障方法,其特征在于,agv车辆为amr车辆。
8.一种agv车辆的运输避障装置,其特征在于,agv车辆的运输避障装置,包括:
9.一种agv车辆的运输避障设备,其特征在于,包括存储器,处理器及存储在所述存储器上并可在所述处理器上运行的agv车辆的运输避障程序,所述处理器执行所述agv车辆的运输避障程序实现权利要求1至7中任一项所述的agv车辆的运输避障方法的步骤。
10.一种存储存储介质,其特征在于,所述存储存储介质上存储有实现agv车辆的运输避障方法的程序,所述实现agv车辆的运输避障方法的程序被处理器执行以实现如权利要求1至7中任一项所述agv车辆的运输避障方法的步骤。
技术总结
本申请公开了一种AGV车辆的运输避障方法、装置、设备及存储介质,属于AGV领域,该方法包括:获取点云坐标,其中,点云坐标为激光雷达扫描托盘支腿得到的,且点云坐标是在以AGV车辆中心为原点的坐标系下;基于点云坐标,从托盘位姿集中匹配,得到估计位姿;基于估计位姿,从点云坐标中确定目标点云坐标。在本申请中,扫描得到托盘支腿的点云坐标后,基于点云坐标匹配得到托盘在AGV车辆上的当前位姿,根据当前位姿,确定出托盘支腿的点云坐标。其中,基于扫描得到的点云坐标可快速出当前位姿,增强了实时性,避免了训练模型后才可区分支腿点云时的时延问题,即,提高了AGV车辆运输时,对所在周围环境进行避障的避障精度。
技术研发人员:陈文成,吕朝顺,陈子文
受保护的技术使用者:劢微机器人科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!