受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人
1.本发明属于机器人技术领域,涉及受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人。
背景技术:
2.随着人类社会发展的需要,要求机器人能够适应复杂的环境实现多领域作业。水陆两栖机器人越来越多地进入军事、工程监测和防护救灾领域,在许多大型项目和特种应用方面发挥了重要的作用。然而现有的机器人大多只能实现单一的陆地或水域作业,当某一任务需要跨域作业时则需要多种机器人联合工作,这就带来了诸多不便。而水陆两栖机器人具备多种运动模式,集成了陆上机器人与水域机器人的特点,可良好适应陆地和水域两种环境,用于执行跨域的特定任务,如洪灾后的救援、运输物资等。
3.如中国发明专利申请(公开号cn114083944a)公开了一种采用解耦式摆线叶片轮推进的水陆两栖机器人,机器人本体连接至少四组摆线叶片轮;每组摆线叶片轮的结构包括:叶片架、控制轴、圆盘和若干叶片组件;叶片由第一旋转驱动机构驱动;叶片架的中心位置内穿设有控制轴,其一端与圆盘偏心连接,另一端与第二旋转驱动机构连接,使叶片组件在公转的同时绕各自的自转轴摆动。该机器人的运动系统结构复杂,且陆上与水中采用同一套运动系统,运动效率低下、越障性能差。
4.又如中国实用新型专利(公开号cn213799131u)公开了一种水陆两栖机器人,包括机器人外壳、腿机构、齿轮传动装置和内部基座,齿轮传动机构和内部基座设置在机器人外壳内部,腿机构包括分布在机器人外壳两侧的四条行走腿;采用两个电机作为动力源,同时利用齿轮齿条、锥齿轮进行传动,使脚链既可在陆地上行走,又可在水中摆动而产生推力。该机器人水中运动的动力源为腿的摆动,水中运动效率低下;采取电机驱动,对驱动件的密封性要求很高。
技术实现要素:
5.本发明的目的是提供受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人,解决了现有机器人运动效率低、越障性能差的问题。
6.本发明所采用的技术方案是,受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人,包括机体,机体上其中一组相对的侧壁上对称的设置有四个移动机构,机体上另外一组相对的侧壁上设置有浮箱,机体上设置有移动机构的一个侧壁上设置有水中驱动机构。
7.本发明的特征还在于,
8.每个移动机构包括转腿,转腿的底端与大腿的一端铰接,大腿的另一端与小腿的一端铰接,小腿的另一端与橡胶足铰接,转腿的侧壁与转腿液压缸推杆的一端铰接,转腿液压缸推杆的另一端与转腿液压缸缸体的一端连接,转腿液压缸缸体的另一端与机体的侧壁铰接,转腿的顶端与大腿液压缸缸体的一端铰接,大腿液压缸缸体的另一端与大腿液压缸
推杆的一端连接,大腿液压缸推杆的另一端与大腿的上部铰接,大腿的底部与小腿液压缸缸体的一端铰接,小腿液压缸缸体的另一端与小腿铰接,转腿通过转架与机体的侧壁铰接。
9.水中驱动机构包括并列设置的左螺旋桨和右螺旋桨,左螺旋桨和右螺旋桨设置于机体侧壁上且分别与设置于机体内的两个液压马达连接。
10.左螺旋桨和右螺旋桨的底部高于机体的底部,左螺旋桨和右螺旋桨的顶部低于水面。
11.机体内且沿其轴向设置有若干隔板。
12.机体的顶部设置有工装安装位。
13.机体的顶部设置有货仓。
14.机体上设置有移动机构的两侧侧壁上分别设置有前保护罩和后保护罩。
15.本发明的有益效果是,
16.(1)本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人,移动机构采用三关节串联腿,每条腿有三个自由度,增加了运动空间与灵活性,极大提高了机器人的运动能力与越障能力;
17.(2)本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人,陆地和水域采用两套运动系统,提高了机器人的运动效率,降低了能量损耗;
18.(3)本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人,采用液压驱动,则运动部件响应速度快、精确度高、工作稳定可靠,且水中的密闭性要求低。
附图说明
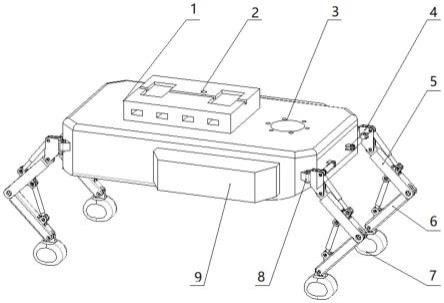
19.图1是本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人的结构示意图;
20.图2是本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人中机体的结构示意图;
21.图3是本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人中移动机构的结构示意图;
22.图4是本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人中移动机构的俯视图;
23.图5是本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人中水中驱动机构的结构示意图;
24.图6是本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人陆地爬行模式示意图;
25.图7是本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人陆地站立行走模式示意图;
26.图8是本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人水中航行模式示意图。
27.图中,1.机体,2.货仓,3.工装安装位,4.转腿,5.大腿,6.小腿,7.橡胶足,8.转架,9.浮箱,10.后保护罩,11.隔板,12.前保护罩,13.大腿液压缸缸体,14.大腿液压缸推杆,15.小腿液压缸缸体,16.小腿液压缸推杆,17.销轴,18.转腿液压缸缸体,19.转腿液压缸推
杆,20.左螺旋桨,21.右螺旋桨。
具体实施方式
28.下面结合附图和具体实施方式对本发明进行详细说明。
29.本发明提供一种受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人,结构如图1所示,包括机体1,机体1的底部设置为流线型,以降低水中航行阻力,机体1上其中一组相对的侧壁上对称的设置有四个移动机构,机体1上设置有移动机构的两侧侧壁上分别设置有前保护罩12和后保护罩10,前保护罩12和后保护罩10用于保护机体,机体1上另外一组相对的侧壁上设置有浮箱9,机体1上设置有移动机构的一个侧壁上设置有水中驱动机构,如图2所示,机体1内且沿其轴向设置有若干隔板11,隔板11具体设置为5个,将机体1内部分为6个机舱,避免机器人因进水而倾覆,为了降低整机质量,每个隔板11厚度为3mm;机体1的顶部设置有工装安装位3、货仓2,工装安装位3可以搭载不同的工作装置,比如挖掘臂、机械手等装置,货仓2用于运输物资。
30.如图3和图4所示,每个移动机构包括转腿4,转腿4的底端与大腿5的一端铰接,大腿5的另一端与小腿6的一端铰接,小腿6的另一端通过销轴与橡胶足7连接,橡胶足7增大机器人与地面接触面积,避免机器人在松软地面发生下陷,转腿4的侧壁与转腿液压缸推杆19的一端铰接,转腿液压缸推杆19的另一端与转腿液压缸缸体18的一端连接,通过转腿液压缸推杆19的伸缩控制整条腿绕转架8的转动;转腿液压缸缸体18的另一端与机体1的侧壁铰接,转腿4的顶端与大腿液压缸缸体13的一端铰接,大腿液压缸缸体13的另一端与大腿液压缸推杆14的一端连接,大腿液压缸推杆14的另一端与大腿5的上部铰接,通过大腿液压缸推杆14的伸缩将直线运动转换为大腿5绕转腿4的回转运动,大腿5的底部与小腿液压缸缸体15的一端铰接,小腿液压缸缸体15的另一端与小腿液压缸推杆16的一端连接,小腿液压缸推杆16的另一端与小腿6铰接,通过小腿液压缸推杆16的伸缩将直线运动转换为小腿6绕大腿5的转动,转腿4通过转架8与机体1的侧壁铰接,四个转架8分别设置于机体1的四个角上,整条移动机构共有三个自由度,增大了机器人橡胶足7的运动空间与灵活性。
31.如图5所示,水中驱动机构包括并列设置的左螺旋桨20和右螺旋桨21,左螺旋桨20和右螺旋桨21设置于机体侧壁上且分别与设置于机体1内的两个液压马达连接,左螺旋桨20和右螺旋桨21的底部高于机体1的底部,左螺旋桨20和右螺旋桨21的顶部低于水面。
32.本发明机器人的动力源均由发动机驱动双联齿轮泵向大腿液压缸缸体13、小腿液压缸缸体15、转腿液压缸缸体18及液压马达供油,双联齿轮泵与液压油箱连接,动力元件(油箱、发动机、双联齿轮泵)集成布设于机体1内,减小了机器人体积。
33.本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人陆地爬行模式的原理如下:如图6所示,该模式下,转腿液压缸推杆19伸出,将四条移动机构调整为与机体1侧面(设置有浮箱的侧壁)50
°
夹角;大腿液压缸推杆14收缩,将大腿5调整为与机体1上表面平行;小腿液压缸推杆16收缩,将小腿6调整为与大腿5共线的位置,至此,机器人完成爬行模式的切换。之后,将小腿液压缸推杆16位置锁定,大腿5与小腿6相当于一体,通过控制大腿液压缸推杆14与转腿液压缸推杆19的伸缩便可实现支腿的前后摆动与上下抬放实现机器人的爬行。
34.本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人陆地站立行走
模式的原理如下:如图7所示该模式下,转腿液压缸推杆19收缩,将四条移动机构调整为与机体1侧面平行;大腿液压缸推杆14伸出,将大腿5与转腿4夹角调整为135
°
;小腿液压缸推杆16收缩,将小腿6与大腿5夹角调整为90
°
。至此,机器人完成行走模式的切换。之后,将转腿液压缸推杆19位置锁定,通过控制大腿液压缸推杆14与小腿液压缸推杆16的伸缩便可实现大腿5和小腿6的前后摆动与上下抬放。
35.本发明受山羊行走与海龟爬行启发的多运动模式水陆两栖机器人水中航行模式原理如下:如图8所示,该模式下,转腿液压缸推杆19收缩,将四条移动机构调整为与机体1侧面平行位置;大腿液压缸推杆14收缩,将大腿5调整为与机体1下表面45
°
夹角;小腿液压缸推杆16伸长,将小腿6调整为与大腿5呈115
°
夹角的位置。此时,机器人四条支腿完全抬起,机器人完成航行模式的切换。之后,各液压缸推杆位置不变,位于机体1尾部的左螺旋桨20、右螺旋桨21工作,实现机器人的水中航行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1