自动泊车方法、装置、电子设备、存储介质及车辆与流程
本发明涉及自动泊车,更具体地,涉及一种自动泊车方法、装置、电子设备、存储介质及车辆。
背景技术:
1、随着自动泊车技术的成熟,自动泊车成为车辆中必不可少的功能。
2、已有的泊车方法是根据车辆的位置和车位的位置规划泊车路径,然后根据泊车路径进行泊车。
3、因此,如何规划泊车路径是决定自动泊车准确性的关键问题。
技术实现思路
1、本发明的一个目的是提供一种用于自动泊车的新技术方案。
2、根据本发明的第一方面,提供了一种自动泊车方法,所述方法包括:
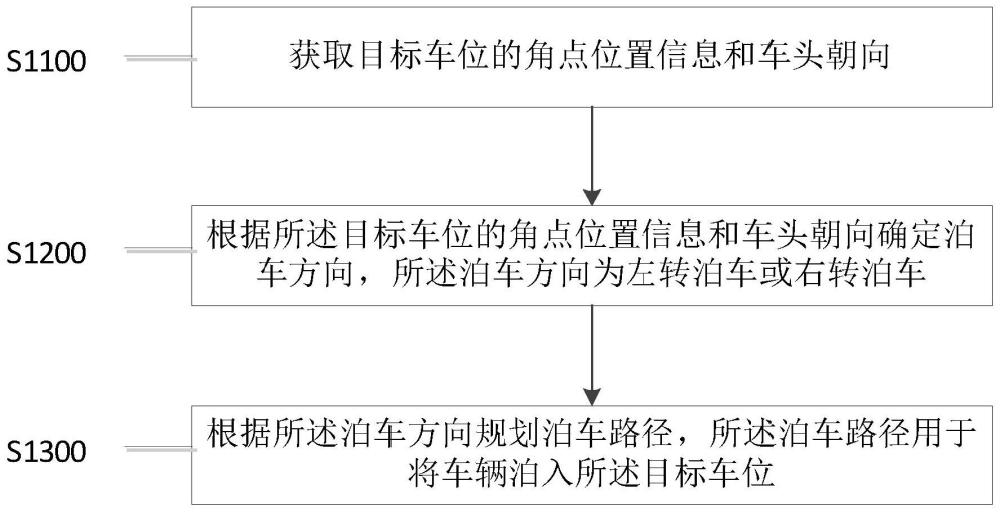
3、获取目标车位的角点位置信息和车头朝向;
4、根据所述目标车位的角点位置信息和车头朝向确定泊车方向,所述泊车方向为左转泊车或右转泊车;
5、根据所述泊车方向规划泊车路径,所述泊车路径用于将车辆泊入所述目标车位。
6、可选地,所述角点位置信息包括第一角点的位置信息和第二角点的位置信息,第一角点和第二角点是目标车位的两个角点;
7、所述根据所述目标车位的角点位置信息和车头朝向确定泊车方向,包括:
8、根据所述第一角点的位置信息和所述第二角点的位置信息确定第一方向,其中,所述第一方向是以第一角点为起点指向第二角点的方向;
9、确定所述车头朝向与所述第一方向之间的第一夹角,其中,所述第一夹角是所述车头朝向沿逆时针方向或顺时针方向旋转至所述第一方向时旋转过的角度;
10、根据所述第一夹角确定泊车方向。
11、可选地,所述第一角点是所述车位入口处的角点,所述第二角点是所述车位底部的角点。
12、可选地,所述第一夹角是所述车头朝向沿逆时针方向旋转至所述第一方向时旋转过的角度;
13、所述根据第一夹角确定泊车方向,包括:
14、在所述第一夹角超过阈值的情况下,判定所述泊车方向为右转泊车;
15、在所述第一夹角未超过阈值的情况下,判定所述泊车方向为左转泊车。
16、可选地,所述确定所述车头朝向与所述第一方向之间的第一夹角,包括:
17、获取世界坐标系的x轴与所述第一方向之间的第二夹角,所述第二夹角是将所述x轴沿逆时针方向旋转至与所述第一方向相同时的角度;
18、获取所述世界坐标系的x轴与所述车头朝向之间的第三夹角,所述第三夹角是将所述x轴沿逆时针方向旋转至与所述车头朝向相同时的角度;
19、将所述第二夹角和所述第三夹角之间的差值确定为所述车头朝向与所述第一方向之间的第一夹角。
20、可选地,在所述根据所述泊车方向规划泊车路径后,所述方法还包括:
21、根据所述泊车路径将所述车辆泊入所述目标车位。
22、根据本发明的第二方面,提供了一种自动泊车装置,所述装置包括:
23、第一获取模块,用于获取目标车位的角点位置信息和车头朝向;
24、第一确定模块,用于根据所述目标车位的角点位置信息和车头朝向确定泊车方向,所述泊车方向为左转泊车或右转泊车;
25、路径规划模块,用于根据所述泊车方向规划泊车路径,所述泊车路径用于将车辆泊入所述目标车位。
26、根据本发明的第三方面,提供了一种电子设备,包括处理器和存储器,所述存储器存储可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如本发明第一方面所述的自动泊车方法的步骤。
27、根据本发明的第四方面,提供了一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如本发明第一方面所述的自动泊车方法的步骤
28、根据本发明的第五方面,提供了一种车辆,包括发明第二方面所述的自动泊车装置。
29、根据本发明的一个实施例,本发明通过在自动泊车时获取目标车位的角点位置信息和车头朝向,根据目标车位的角点位置信息和车头朝向确定泊车方向,根据泊车方向进行自动泊车,避免因泊车方向错误而导致泊车失败,能够顺利完成泊车。
30、通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
技术特征:
1.一种自动泊车方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述角点位置信息包括第一角点的位置信息和第二角点的位置信息,第一角点和第二角点是目标车位的两个角点;
3.根据权利要求2所述的方法,其特征在于,所述第一角点是所述车位入口处的角点,所述第二角点是所述车位底部的角点。
4.根据权利要求3所述的方法,其特征在于,所述第一夹角是所述车头朝向沿逆时针方向旋转至所述第一方向时旋转过的角度;
5.根据权利要求2-4任一项所述的方法,其特征在于,所述确定所述车头朝向与所述第一方向之间的第一夹角,包括:
6.根据权利要求1所述的方法,其特征在于,在所述根据所述泊车方向规划泊车路径后,所述方法还包括:
7.一种自动泊车装置,其特征在于,所述装置包括:
8.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如权利要求1-6任一项所述的自动泊车方法的步骤。
9.一种可读存储介质,其特征在于,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如权利要求1-6任一项所述的自动泊车方法的步骤。
10.一种车辆,其特征在于,包括权利要求7所述的自动泊车装置。
技术总结
本发明公开了一种自动泊车方法、装置、电子设备、存储介质及车辆。所述方法包括:获取目标车位的角点位置信息和车头朝向;根据所述目标车位的角点位置信息和车头朝向确定泊车方向,所述泊车方向为左转泊车或右转泊车;根据所述泊车方向规划泊车路径,所述泊车路径用于将车辆泊入所述目标车位。本发明通过在自动泊车时获取目标车位的角点位置信息和车头朝向,根据目标车位的角点位置信息和车头朝向确定泊车方向,根据泊车方向进行自动泊车,避免因泊车方向错误而导致泊车失败,能够顺利完成泊车。
技术研发人员:熊斌,钟益林,毕文佳,彭邦煌,乔宗超
受保护的技术使用者:比亚迪股份有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!