多车干扰下智能物流车高效节能驾驶优化控制方法及装置
本发明涉及智能驾驶,具体涉及多车干扰下智能物流车高效节能驾驶优化控制方法及装置。
背景技术:
1、城市智能电动物流车路况类型多样、行驶环境复杂,周围车辆干扰行驶的情况频发。多车干扰的随机、动态多变特性,对城市智能电动物流车的节能驾驶影响明显,效率低、能耗高的问题凸显。因此,在安全行驶前提下,开展向多车干扰的高效型节能驾驶控制方法的研究,需求迫切,亟待开展。
2、相关技术中,对于节能驾驶控制方法,根据车辆的初始位置信息、目的地信息、通行时间以及行驶速度信息,为车辆规划行驶的最优车速,从而控制车辆行驶,但是这种方法过于理想化,实现对车辆车速的控制过于粗糙,与实际行驶过程中的情况相差较大,不符合车辆驾驶的实际情况,容易对车辆造成损害。
技术实现思路
1、有鉴于此,本发明提供了一种多车干扰下智能物流车高效节能驾驶优化控制方法及装置,以解决面向城市复杂路况、多车干扰交互的场景,配送行驶效率低、行驶能耗高的问题。
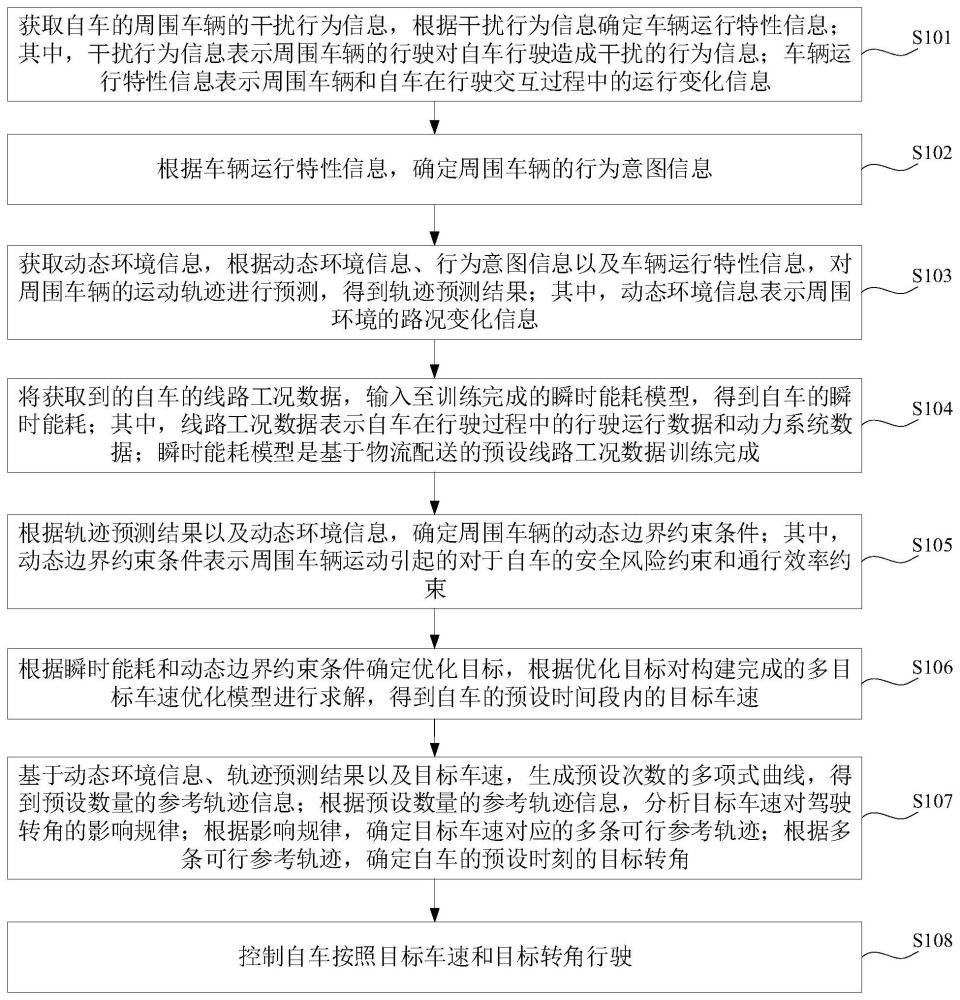
2、第一方面,本发明提供了一种多车干扰下智能物流车高效节能驾驶优化控制方法,包括:获取自车的周围车辆的干扰行为信息,根据干扰行为信息确定车辆运行特性信息;其中,干扰行为信息表示周围车辆的行驶对自车行驶造成干扰的行为信息;车辆运行特性信息表示周围车辆和自车在行驶交互过程中的运行变化信息;根据车辆运行特性信息,确定周围车辆的行为意图信息;获取动态环境信息,根据动态环境信息、行为意图信息以及车辆运行特性信息,对周围车辆的运动轨迹进行预测,得到轨迹预测结果;其中,动态环境信息表示周围环境的路况变化信息;将获取到的自车的线路工况数据,输入至训练完成的瞬时能耗模型,得到自车的瞬时能耗;其中,线路工况数据表示自车在行驶过程中的行驶运行数据和动力系统数据;瞬时能耗模型是基于物流配送的预设线路工况数据训练完成;根据轨迹预测结果以及动态环境信息,确定周围车辆的动态边界约束条件;其中,动态边界约束条件表示周围车辆运动引起的对于自车的安全风险约束和通行效率约束;根据瞬时能耗和动态边界约束条件确定优化目标,根据优化目标对构建完成的多目标车速优化模型进行求解,得到自车的预设时间段内的目标车速;基于动态环境信息、轨迹预测结果以及目标车速,生成预设次数的多项式曲线,得到预设数量的参考轨迹信息;根据预设数量的参考轨迹信息,分析目标车速对驾驶转角的影响规律;根据影响规律,确定目标车速对应的多条可行参考轨迹;根据多条可行参考轨迹,确定自车的预设时刻的目标转角;控制自车按照目标车速和目标转角行驶。
3、本发明获取自车的周围车辆的为自车行驶造成干扰的干扰行为信息,根据干扰行为信息确定周围车辆和自车在行驶过程中的运行变化的车辆运行特性信息,根据车辆运行特性信息,确定周围车辆的行为意图信息,得知周围车辆的行为意图信息,才能判断自车的运行变化,确定周围车辆的行为意图信息,使得后续对周围车辆的运行轨迹的预测更加准确。本发明获取表示周围环境的路况变化的动态环境信息,根据动态环境信息、行为意图信息以及车辆运行特性信息,对周围车辆的运动轨迹进行预测,得到轨迹预测结果,由于周围车辆的运行轨迹和行为意图、周围环境以及车辆运行变化都有密切的联系,因此综合动态环境信息、行为意图信息以及车辆运行特性信息,对周围车辆的运动轨迹进行预测,得到的轨迹预测结果更加准确,更加符合实际情况下的周围车辆的运行轨迹。本发明将获取到的自车的线路工况数据,输入至训练完成的瞬时能耗模型,得到自车的瞬时能耗,根据轨迹预测结果以及动态环境信息,确定周围车辆的周围车辆运动引起的对于自车的环境和驾驶的动态边界约束条件,根据瞬时能耗和动态边界约束条件确定优化目标,根据优化目标对构建完成的多目标车速优化模型进行求解,得到自车的预设时间段内的目标车速。本发明在得到预设时间段的目标车速的过程中,不仅考虑到自车的瞬时能耗,还考虑到周围车辆运动引起的对于自车的环境和驾驶的约束信息,在保证瞬时能耗的小的情况下,还保证目标车速在驾驶过程中的安全性,并且,得到的目标车速是预设时间段内的目标车速,在预设时间段内根据目标车速控制自车行驶,不仅降低了能源的消耗,也保证了通行的高效。本发明根据动态环境信息、轨迹预测结果以及目标车速,生成多条参考轨迹信息,根据多条参考轨迹信息分析目标车速对驾驶转角的影响规律,根据影响规律,得到目标车速对应的多条可行参考轨迹,并在多条可行参考轨迹中选择最优转角为目标转角,不仅考虑到实际情况中自车的运动轨迹对转角的影响,还考虑到车速对转角的影响,因此,得到的目标转角更加符合目标车速下的预设时刻的最优转角,从而控制自车的安全驾驶,在预设时刻按照目标转角控制自车行驶,保证自车行驶的安全和高效。本发明控制自车按照目标车速和目标转角行驶,从而使得对自车的辅助驾驶即保证车速的节能性和高效性,又保证转角的安全性和高效性,从而防止自车在行驶过程中出现安全隐患,实现对自车的安全驾驶的横向和纵向的高效控制。本发明与相关技术中的根据车辆的初始位置信息、目的地信息、通行时间以及行驶速度信息,为车辆规划行驶的最优车速相比,考虑到的因素更多,得到目标车速更准确,同时实现横向和纵向的优化控制,更符合实际情况下的车辆驾驶,使得自车根据目标车速行驶更加安全,更加高效节能。
4、在一种可选的实施方式中,多车干扰下智能物流车高效节能驾驶优化控制方法还包括:根据干扰行为信息,确定目标车速和目标转角的跟踪控制问题;采用鲁棒模型预测控制算法对跟踪控制问题进行求解,得到实时车速和实时转角;控制自车按照实时车速和实时转角行驶。
5、本发明根据干扰行为信息,确定目标车速和目标转角的跟踪控制问题,采用鲁棒模型预测控制算法对跟踪控制问题进行求解,得到实时车速和实时转角,实现对车速和转角的实时跟踪,得到的实时车速和实时转角具有时效性,保证自车的安全驾驶,控制自车按照实时车速和实时转角行驶,保证自车的节能高效驾驶。
6、在一种可选的实施方式中,根据车辆运行特性信息,确定周围车辆的行为意图信息,包括:获取环境信息和周围车辆的驾驶人状态监测信息;根据环境信息和驾驶人状态监测信息,确定周围车辆的驾驶人情绪特征;将车辆运行特性信息、驾驶人情绪特征以及获取到的道路几何特征,输入至训练完成的周围车辆行为意图模型,得到行为意图信息;其中,周围车辆行为意图模型的输入为车辆运行特性信息、驾驶人情绪特征以及道路几何特征,周围车辆行为意图模型的输出为行为意图信息,道路几何特征表示道路的静态特征。
7、本发明根据获取到的环境信息和驾驶人状态监测信息,确定周围车辆的驾驶人情绪特征,将车辆运行特性信息、驾驶人情绪特征以及获取到的道路几何特征,输入至训练完成的周围车辆行为意图模型,得到行为意图信息,由于周围车辆的行为意图信息和周围车辆驾驶人的情绪特征、车辆运行特性以及道路的静态特征都存在密切的联系,因此根据车辆运行特性信息、驾驶人情绪特征以及获取到的道路几何特征,预测得到的行为意图信息更加准确。
8、在一种可选的实施方式中,获取动态环境信息,包括:根据获取到的道路几何特征、道路动态要素、多车交互干扰运动特性以及多车干扰交互意图信息,构建环境动态模型;根据环境动态模型,确定动态环境信息。
9、本发明获取道路上的动态特征和静态特征,从而构建环境动态模型,通过环境动态模型,实时获取动态环境信息,保证动态环境信息的实时性和准确性。
10、在一种可选的实施方式中,根据动态环境信息、行为意图信息以及车辆运行特性信息,对周围车辆的运动轨迹进行预测,得到轨迹预测结果,包括:将动态环境信息、行为意图信息以及车辆运行特性信息,输入至训练完成的轨迹预测模型,得到轨迹预测结果;其中,轨迹预测模型的输入为动态环境信息、行为意图信息以及车辆运行特性信息,轨迹预测模型的输出为轨迹预测结果。
11、本发明的轨迹预测模型经过大量数据的训练以及检验,因此,根据轨迹预测模型得到的轨迹预测结果更加准确,更加符合实际情况下的周围车辆的行驶意图。
12、在一种可选的实施方式中,根据多条可行参考轨迹,确定自车的预设时刻的目标转角,包括:计算每条可行参考轨迹的代价函数,在代价函数中选取具有代价函数值最小的目标代价函数;根据目标代价函数对应目标可行参考轨迹,确定自车的预设时刻的目标转角。
13、在一种可选的实施方式中,多车干扰下智能物流车高效节能驾驶优化控制方法还包括对瞬时能耗模型进行训练的过程,训练瞬时能耗模型的过程包括:基于第一预设算法,构建瞬时能耗模型;将获取到的预设线路工况数据输入至瞬时能耗模型,对瞬时能耗模型进行训练,瞬时能耗模型的输入为预设线路工况数据,瞬时能耗模型的输出为瞬时能耗。
14、本发明根据预设线路工况数据对瞬时能耗模型进行训练,不断提高瞬时能耗模型的准确率,从而在对瞬时能耗模型的应用中,根据线路工况数据得到的瞬时能耗更加准确。
15、在一种可选的实施方式中,根据瞬时能耗和动态边界约束条件确定优化目标,根据优化目标对构建完成的多目标车速优化模型进行求解,得到所述自车的预设时间段内的目标车速,包括:基于瞬时能耗模型和动态边界约束条件,构建多目标车速优化模型;根据瞬时能耗和动态边界约束条件,确定优化目标;利用迭代动态规划算法,根据优化目标对多目标车速优化模型进行求解,得到所述自车的预设时间段内的目标车速。
16、本发明基于瞬时能耗模型和动态边界约束条件,对多目标车速优化模型进行构建,多目标车速优化模型以通行效率和能耗为优化目标,不断利用迭代动态规划算法对多目标车速优化模型进行求解,得到目标车速,使得目标车速更加准确。
17、在一种可选的实施方式中,多车干扰下智能物流车高效节能驾驶优化控制方法还包括对周围车辆行为意图模型进行训练的过程,训练周围车辆行为意图模型的过程包括:基于第二预设算法,建立周围车辆行为意图模型;将获取到的预设城市道路驾驶数据输入至周围车辆行为意图模型,对周围车辆行为意图模型进行训练;其中,周围车辆行为意图模型的输入为预设城市道路驾驶数据,周围车辆行为意图模型的输出为周围车辆的行为意图信息。本发明根据预设城市道路驾驶数据对周围车辆行为意图模型进行训练,不断提高周围车辆行为意图模型的准确率,从而在对周围车辆行为意图模型的应用中,预测得到的周围车辆行为意图信息更加准确。
18、在一种可选的实施方式中,多车干扰下智能物流车高效节能驾驶优化控制方法还包括对轨迹预测模型进行训练的过程,训练轨迹预测模型的过程包括:基于第三预设算法,构建轨迹预测模型;将获取到的周围车辆的预设行为意图信息以及预设路况信息输入至轨迹预测模型,对轨迹预测模型进行训练;其中,轨迹预测模型的输入为预设行为意图信息以及预设路况信息,轨迹预测模型的输出为周围车辆的轨迹预测信息。
19、本发明根据预设行为意图信息以及预设路况信息对轨迹预测模型进行训练,不断提高轨迹预测模型的准确率,从而在对轨迹预测模型的应用中,预测得到的轨迹信息更加准确。
20、第二方面,本发明提供了一种多车干扰下智能物流车高效节能驾驶优化控制装置,包括:信息获取模块,用于获取自车的周围车辆的干扰行为信息,根据干扰行为信息确定车辆运行特性信息;其中,干扰行为信息表示周围车辆的行驶对自车行驶造成干扰的行为信息;车辆运行特性信息表示周围车辆和自车在行驶交互过程中的运行变化信息;行为意图信息确定模块,用于根据车辆运行特性信息,确定周围车辆的行为意图信息;轨迹预测模块,用于获取动态环境信息,根据动态环境信息、行为意图信息以及车辆运行特性信息,对周围车辆的运动轨迹进行预测,得到轨迹预测结果;其中,动态环境信息表示周围环境的路况变化信息;瞬时能耗确定模块,用于将获取到的自车的线路工况数据,输入至训练完成的瞬时能耗模型,得到自车的瞬时能耗;其中,线路工况数据表示自车在行驶过程中的行驶运行数据和动力系统数据;瞬时能耗模型是基于物流配送的预设线路工况数据训练完成;约束信息确定模块,用于根据轨迹预测结果以及动态环境信息,确定周围车辆的动态边界约束条件;其中,动态边界约束条件表示周围车辆运动引起的对于自车的安全风险约束和通行效率约束;目标车速确定模块,用于根据瞬时能耗和动态边界约束条件确定优化目标,根据优化目标对构建完成的多目标车速优化模型进行求解,得到自车的预设时间段内的目标车速;目标转角确定模块,用于基于动态环境信息、轨迹预测结果以及目标车速,生成预设次数的多项式曲线,得到预设数量的参考轨迹信息;根据预设数量的参考轨迹信息,分析目标车速对驾驶转角的影响规律;根据影响规律,确定目标车速对应的多条可行参考轨迹;根据多条可行参考轨迹,确定自车的预设时刻的目标转角;自车控制模块,用于控制自车按照目标车速和目标转角行驶。
21、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的多车干扰下智能物流车高效节能驾驶优化控制方法。
22、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的多车干扰下智能物流车高效节能驾驶优化控制方法。
- 还没有人留言评论。精彩留言会获得点赞!