一种制动方法、系统、存储介质与流程
1.本技术涉及车辆制动领域,具体而言,涉及一种制动方法、系统、存储介质。
背景技术:
2.随着汽车产业的高速发展,汽车的自动化控制系统也越来越多,其中,车身电子稳定系统(electronic stability program,esp)和冗余电子驻车系统(redundancy electronic parking brake,repb)可在车辆需要紧急制动时,控制车辆实现防抱死紧急制动。但是随着车辆使用时间的增加车身电子稳定系统和冗余电子驻车系统很有可能会发生失效时的情况,因此如何在车辆的车身电子稳定系统和冗余电子驻车系统功能失效时控制实现车辆紧急制动,成为了当前亟待解决的问题。
技术实现要素:
3.为了解决上述问题,本发明提出了一种制动方法,能在车辆的车身电子稳定系统和车身电子稳定系统功能失效时控制车辆实现紧急制动,进一步的提升了车辆的安全性。
4.本发明提供了一种制动方法,其特征在于,所述方法包括:获取车辆的状态信息;检测所述车辆的车身电子稳定系统的电子紧急制动功能状态,以及冗余电子驻车系统的多个制动器的状态;在检测到所述车辆的车身电子稳定系统的电子紧急制动功能失效,而且所述车辆的冗余电子驻车系统的单个制动器发生故障,以及所述车辆的状态信息满足预设的多个条件时,控制所述车辆进行防抱死制动和转向。
5.在一实施方式中,所述车辆的状态信息包括:冗余电子驻车系统的工作信息、车身电子稳定系统的工作信息、转向系统的工作信息、惯性测量单元的工作信息、车辆车速和轮速。
6.在一实施方式中,所述预设的多个条件包括:车辆的冗余电子驻车系统的制动器为释放状态;车辆的惯性测量单元处于正常工作状态;车辆的转向系统处于正常工作状态;车辆的车速及轮速大于预设值。
7.在一实施方式中,所述在检测到所述车辆的车身电子稳定系统的电子紧急制动功能失效,而且所述车辆的冗余电子驻车系统的单个制动器发生故障,以及所述车辆的状态信息满足预设的多个条件时,控制所述车辆进行防抱死制动和转向的步骤,包括:检测所述车辆的冗余电子驻车系统的拉起时间是否超过预设时长;在所述车辆的冗余电子驻车系统的拉起时间超过预设时长时,根据所述车辆的车速及轮速控制未故障制动器进行防抱死制动,并根据所述车辆的惯性测量单元的工作信息控制所述车辆进行转向。
8.在一实施方式中,所述检测所述车辆的冗余电子驻车系统的拉起时间是否超过预设时长,之前包括:根据所述车辆的惯性测量单元的工作信息获取所述预设时长。
9.在一实施方式中,所述在检测到所述车辆的车身电子稳定系统的电子紧急制动功能失效,而且所述车辆的冗余电子驻车系统的单个制动器发生故障,以及所述车辆的状态信息满足预设的多个条件时,控制所述车辆进行防抱死制动和转向的步骤,包括:在所述车
辆的冗余电子驻车系统的拉起时间未超过预设时长时,根据所述车辆的惯性测量单元的工作信息判断所述车辆是否发生横摆;在所述车辆发生横摆时,根据所述车辆的横摆幅度控制所述车辆进行预转向后,根据所述车辆的车速及轮速控制未故障制动器进行防抱死制动,并根据所述车辆的惯性测量单元的工作信息控制所述车辆进行转向。
10.在一实施方式中,所述根据所述车辆的车速及轮速控制未故障制动器进行防抱死制动,包括:基于所述车辆的车速及轮速获取所述车辆当前的滑移率;根据所述车辆当前的滑移率调整所述未故障制动器的制动力,以使得所述未故障制动器将所述车辆的滑移率控制在预设区间。
11.在一实施方式中,所述方法包括:控制所述车辆进行防抱死制动和转向时,根据所述车辆的惯性测量单元的工作信息调整未故障制动器的制动力。
12.本发明还提供一种基于冗余电子驻车系统的制动系统,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述计算机程序时,实现如上述的制动方法的步骤。
13.本发明还提供一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述的制动方法的步骤。
14.本发明提供的一种制动方法、系统、存储介质,获取车辆的状态信息,在车辆的状态信息满足预设的多个条件时,控制车辆进行防抱死制动和转向,能在车辆的车身电子稳定系统和车身电子稳定系统功能失效时控制车辆实现紧急制动,进一步的提升了车辆的安全性。
附图说明
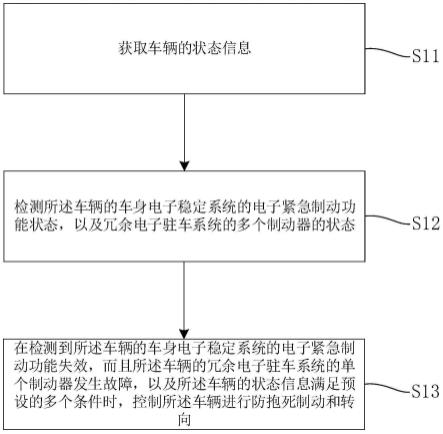
15.图1为本发明第一实施例的制动方法的流程图;
16.图2为本发明第一实施例的图1中的步骤s13的方法示意图;
17.图3为本发明第一实施例的控制车辆进行防抱死制动和转向的方法的示意图。
具体实施方式
18.有关本发明的前述及其他技术内容、特点及功效,在以下配合参考图式的较佳实施例的详细说明中将可清楚呈现。通过具体实施方式的说明,当可对本发明为达成预定目的所采取的技术手段及功效得以更加深入且具体的了解,然而所附图式仅是提供参考与说明之用,并非用来对本发明加以限制。
19.为更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对本发明详细说明如下。
20.图1为本发明第一实施例的制动方法的流程图。
21.如图1所示,本实施例提供的制动方法包括以下步骤:
22.步骤s11:获取车辆的状态信息。
23.具体地,在一实施方式中,车辆的状态信息可以包括冗余电子驻车系统的工作信息、车身电子稳定系统的工作信息、转向系统(electric power steering,eps)的工作信息、惯性测量单元(inertial measurement unit,imu)的工作信息、车辆车速和轮速中的至少一项。
24.步骤s12:检测所述车辆的车身电子稳定系统的电子紧急制动功能状态,以及冗余电子驻车系统的多个制动器的状态。
25.具体地,在一实施方式中,检测冗余电子驻车系统的多个制动器的状态时,根据冗余电子驻车系统的工作信息,获取冗余电子驻车系统的两个制动器的工作状态,根据两个制动器的工作状态判断车辆的冗余电子驻车系统的单个制动器是否发生故障,在冗余电子驻车系统的两个制动器中的一个制动器处于正常工作状态,另一个制动器未处于正常工作状态时,则判定车辆的冗余电子驻车系统的单个制动器发生故障;在冗余电子驻车系统的两个制动器都未处于正常工作状态,或两个制动器都处于正常工作状态时,则判定车辆的冗余电子驻车系统未发生单个制动器故障。
26.步骤s13:在检测到所述车辆的车身电子稳定系统的电子紧急制动功能失效,而且所述车辆的冗余电子驻车系统的单个制动器发生故障,以及所述车辆的状态信息满足预设的多个条件时,控制所述车辆进行防抱死制动和转向。
27.具体地,在一实施方式中,因冗余电子驻车系统的紧急制动功能为车身电子稳定系统的电子紧急制动功能的备用制动手段,因此本发明仅在车身电子稳定系统的电子紧急制动功能失效时,检测冗余电子驻车系统的紧急制动功能是否能正常使用,在冗余电子驻车系统的紧急制动功能不能正常使用(即冗余电子驻车系统的单个制动器发生故障)时,才检测车辆的状态信息是否满足预设的其他几个条件,在检测到车辆满足预设的其他几个条件时,才控制车辆进行防抱死制动和转向。即本发明能够在备用制动手段冗余电子驻车系统发生故障时提供紧急制动功能,进一步的升级了制动安全备份。
28.具体地,在一实施方式中,预设的多个条件可以包括:车辆的冗余电子驻车系统的制动器为释放状态、车辆的惯性测量单元处于正常工作状态、车辆的转向系统处于正常工作状态、车辆的车速及轮速大于预设值中的至少一项。
29.具体地,在一实施方式中,步骤s13:在检测到车辆的车身电子稳定系统的电子紧急制动功能失效,而且车辆的冗余电子驻车系统的单个制动器发生故障,以及车辆的状态信息满足预设的多个条件时,控制车辆进行防抱死制动和转向,包括:在检测到车辆的车身电子稳定系统的电子紧急制动功能失效,而且车辆的冗余电子驻车系统的单个制动器发生故障,车辆的状态信息满足预设的多个条件时,检测车辆的冗余电子驻车系统的拉起时间是否超过预设时长;在车辆的冗余电子驻车系统的拉起时间超过预设时长时,基于车辆的车速及轮速获取车辆当前的滑移率,根据车辆当前的滑移率调整未故障制动器的制动力,以使得未故障制动器将车辆的滑移率控制在预设区间进行防抱死制动,并根据车辆的惯性测量单元的工作信息控制车辆进行转向;在车辆的冗余电子驻车系统的拉起时间未超过预设时长时,根据车辆的惯性测量单元的工作信息判断车辆是否发生横摆;在判断车辆发生横摆时,根据车辆的横摆幅度控制车辆进行预转向后,基于车辆的车速及轮速获取车辆当前的滑移率,根据车辆当前的滑移率调整未故障制动器的制动力,以使得未故障制动器将车辆的滑移率控制在预设区间进行防抱死制动,并根据车辆的惯性测量单元的工作信息控制车辆进行转向;在判断车辆没有发生横摆时,返回检测车辆的冗余电子驻车系统的拉起时间是否超过预设时长的步骤。其中,预设时长初始时可根据生产商或用户输入的时间根设定,和/或根据冗余电子驻车系统拉起时,惯性测量单元的信号读数进行调整;滑移率的预设区间可设定在15%到20%之间,以获取较优的制动效能与制动时的方向稳定性。
30.具体地,在一实施方式中,在控制车辆进行防抱死制动和转向后,若检测到惯性测量单元的横向加速度、横摆角速度的变化率大于预设值,则根据溢出值减少未故障制动器的制动力,以防止制动过度。
31.本发明提供的一种制动方法,在车辆的状态信息满足预设的多个条件时,控制车辆进行防抱死制动和转向,能在车辆的车身电子稳定系统和车身电子稳定系统功能失效时控制车辆实现紧急制动,进一步的提升了车辆的安全性。
32.图2为本发明第一实施例的图1中的步骤s13的方法示意图。
33.如图2所示,本实施例提供的图1中的步骤s13的方法包括以下步骤:
34.步骤s1311:检测车辆的车身电子稳定系统的电子紧急制动功能是否失效。
35.具体地,在检测到车辆上电或点火时,检测车辆的车身电子稳定系统的电子紧急制动功能是否失效,若失效,则进入步骤s1312:检测车辆的冗余电子驻车系统的单个制动器是否发生故障;若未失效,则进行禁止将车辆的单制动器失效处理策略设为使能状态,或返回步骤s1311:继续检测车辆的车身电子稳定系统的电子紧急制动功能是否失效。
36.具体地,在一实施方式中,在检测到车辆上电或点火的同时,获取车辆的状态信息,其中车辆的状态信息可以包括冗余电子驻车系统的工作信息、车身电子稳定系统的工作信息、转向系统的工作信息、惯性测量单元的工作信息、车辆车速和轮速中的一项。
37.具体地,检测车辆的冗余电子驻车系统的单个制动器是否发生故障时,根据冗余电子驻车系统的工作信息,获取冗余电子驻车系统的两个制动器的工作状态,在冗余电子驻车系统的两个制动器中的一个制动器处于正常工作状态时,进入步骤s1313:检测车辆的转向系统是否处于正常工作状态;在冗余电子驻车系统的两个制动器都未处于正常工作状态,或两个制动器都处于正常工作状态时,进行禁止将车辆的单制动器失效处理策略设为使能状态,或返回步骤s1311:继续检测车辆的车身电子稳定系统的电子紧急制动功能是否失效,或返回步骤s1312:继续检测车辆的冗余电子驻车系统的单个制动器是否发生故障。
38.具体地,在判断制动器的正常工作状态时,会判断制动器的电机控制器(motor control unit,muc)和制动电机是否能正常工作,在电机控制器和制动电机都能正常工作时,则判定制动器处于正常工作状态;在电机控制器和制动电机中的一个或两个不能正常工作时,则判定制动器未处于正常工作状态。
39.具体地,在检测到车辆的转向系统处于正常工作状态时,进入步骤s1314:检测车辆的车速及轮速是否大于预设值;在检测到车辆的转向系统未处于正常工作状态时,进行禁止将车辆的单制动器失效处理策略设为使能状态,或返回步骤s1311:继续检测车辆的车身电子稳定系统的电子紧急制动功能是否失效,或返回步骤s1313:继续检测车辆的转向系统是否处于正常工作状态。
40.具体地,在检测到车辆的车速及轮速大于预设值时,进入步骤s1315:检测车辆的惯性测量单元是否处于正常工作状态;在检测到车辆的车速及轮速未大于预设值时,进行禁止将车辆的单制动器失效处理策略设为使能状态,或返回步骤s1311:继续检测车辆的车身电子稳定系统的电子紧急制动功能是否失效,或返回步骤s1314:继续检测车辆的车速及轮速是否大于预设值。
41.具体地,检测车辆的惯性测量单元是否处于正常工作状态时,根据惯性测量单元的工作信息获取惯性测量单元的信号读数,并判断信号读数是否有效,在信号读数有效时,
则判定车辆的惯性测量单元处于正常工作状态,进入步骤s1316:检测车辆的冗余电子驻车系统的制动器为释放状态;在信号读数无效时,则判定车辆的惯性测量单元未处于正常工作状态,进行禁止将车辆的单制动器失效处理策略设为使能状态,或返回步骤s1311:继续检测车辆的车身电子稳定系统的电子紧急制动功能是否失效,或返回步骤s1315:继续检测车辆的惯性测量单元是否处于正常工作状态。其中,惯性测量单元的信号读数包括纵向加速度、横向加速度、横摆角速度。
42.具体地,在检测到车辆的冗余电子驻车系统的制动器为释放状态时,进行将车辆的单制动器失效处理策略设为使能状态;在检测到车辆的冗余电子驻车系统的制动器未处于释放状态时,进行禁止将车辆的单制动器失效处理策略设为使能状态,或返回步骤s1311:继续检测车辆的车身电子稳定系统的电子紧急制动功能是否失效,或返回步骤s1316:继续检测车辆的冗余电子驻车系统的制动器为释放状态。
43.本发明提供的一种制动方法,在车辆的状态信息满足预设的多个条件时,控制车辆进行防抱死制动和转向,能在车辆的车身电子稳定系统和车身电子稳定系统功能失效时控制车辆实现紧急制动,进一步的提升了车辆的安全性。
44.图3为本发明第一实施例的控制车辆进行防抱死制动和转向的方法的示意图。
45.如图3所示,本实施例提供的控制车辆进行防抱死制动和转向方法包括以下步骤:
46.步骤s1321:检测车辆的冗余电子驻车系统的拉起时间是否小于预设时长。
47.具体地,在车辆的单制动器失效处理策略处于使能状态时,检测车辆的冗余电子驻车系统的拉起时间是否小于预设时长;若小于,则进入步骤s1324:根据车辆的惯性测量单元的工作信息判断车辆是否发生横摆;若未小于,则进入步骤s1322:控制车辆的未故障制动器进行防抱死制动。其中,预设时长初始时可根据生产商或用户输入的时间根设定。
48.具体地,在一实施方式中,在步骤s1321:检测车辆的冗余电子驻车系统的拉起时间是否小于预设时长时,根据惯性测量单元的获取的横向加速度和横摆角速度获取车辆的横摆幅度,并判断车辆的横摆幅度是否超过门限值,若超过门限值,则根据车辆的横摆幅度缩短预设时长;若未超过门限值,则根据生产商或用户输入的时间获取预设时长。
49.具体地,在步骤s1324:根据车辆的惯性测量单元的工作信息判断车辆是否发生横摆时,根据惯性测量单元的工作信息获取惯性测量单元的横向加速度和横摆角速度,并判断车辆的惯性测量单元的横向加速度和横摆角速度是否超过门限值,若超过,则判定车辆发生横摆;若未超过,则判定车辆未发生横摆。
50.具体地,判定车辆发生横摆时,进入步骤s1325:根据车辆的惯性测量单元的工作信息控制车辆进行预转向;判定车辆未发生横摆时,则返回步骤s1321:继续检测车辆的冗余电子驻车系统的拉起时间是否小于预设时长。
51.具体地,在一实施方式中,根据车辆的惯性测量单元的工作信息控制车辆进行预转向时,基于惯性测量单元的工作信息获取惯性测量单元的横向加速度和横摆角速度,根据惯性测量单元的横向加速度和横摆角速度获取车辆的横摆方向和横摆幅度,根据车辆的横摆方向和横摆幅度控制车辆进行预转向以预先修正车辆的姿态。
52.具体地,步骤s1322:控制车辆的未故障制动器进行防抱死制动时,基于车辆的车速及轮速获取车辆当前的滑移率,根据车辆当前的滑移率调整未故障制动器的制动力,以使得未故障制动器在制动时将车辆的滑移率控制在预设区间。例如,若车辆当前的未故障
制动器是右制动器,则基于车辆的车速及右后轮的轮速获取车辆右后轮当前的滑移率,根据车辆右后轮当前的滑移率调整右制动器的制动力,以使得右制动器在制动时将车辆右后轮的滑移率控制在预设区间;若车辆当前的未故障制动器是左制动器,则基于车辆的车速及左后轮的轮速获取车辆左后轮当前的滑移率,根据车辆左后轮当前的滑移率调整左制动器的制动力,以使得左制动器在制动时将车辆右后轮的滑移率控制在预设区间。
53.具体地,在一实施方式中,可将滑移率的预设区间可设定为15%到20%,以获取较优的制动效能与制动时的方向稳定性。
54.具体地,步骤s1323:根据车辆的惯性测量单元的工作信息控制车辆进行转向时,基于惯性测量单元的工作信息获取惯性测量单元的横向加速度和横摆角速度,根据惯性测量单元的横向加速度和横摆角速度控制车辆进行转向以修正车辆的姿态和抵消单边刹车带来的车辆姿态偏移。
55.具体地,预转向的车轮转动幅度小于转向的车轮转动幅度。
56.具体地,在一实施方式中,在控制车辆进行防抱死制动和转向后,若检测到惯性测量单元的横向加速度、横摆角速度的变化率大于预设值,则根据溢出值减少未故障制动器的制动力,以防止制动过度。
57.本发明还提供一种基于冗余电子驻车系统的制动系统,包括存储器、处理器以及存储在存储器中并可在左处理器上运行的计算机程序,处理器执行左计算机程序时,实现如上述的制动方法的步骤。
58.本发明还提供一种存储介质,存储介质存储有计算机程序,计算机程序被处理器执行时实现如上述的制动方法的步骤。
59.本发明提供的一种制动方法、系统、存储介质,获取车辆的状态信息,在车辆的状态信息满足预设的多个条件时,控制车辆进行防抱死制动和转向,能在车辆的车身电子稳定系统和车身电子稳定系统功能失效时控制车辆实现紧急制动,进一步的提升了车辆的安全性。
60.以上,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可通过上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1