包括双离合器的电动车辆的控制装置和控制方法与流程
本公开涉及用于电动车辆的双离合器装置的控制装置和控制方法。更具体地,本公开涉及一种应用于电动车辆的双离合器的控制装置和控制方法。
背景技术:
1、通常,后轮驱动车辆是将从驱动源产生的动力通过变速器进行变速并通过传动轴传递到后轮轴的车辆,并且由于旋转半径小而容易漂移,并且由于如果操纵性能良好,则在快速加速过程中重心向后轮侧移动,因此随着加速度的增加,抓地力得到改善。
2、此外,四轮驱动(4wd)或全轮驱动(awd)车辆将从驱动源产生的动力分配给四个车轮以增加每个车轮的旋转力,因此具有在崎岖不平的道路、下雪、结冰或泥泞的道路等上的优异行驶性能的优点。
3、在本方式中,后轮驱动车辆、4wd车辆和awd车辆可以设置有用于将来自驱动源的驱动扭矩分配到后轮或所有车轮的液压离合器装置,并且这种液压离合器装置可以设置在前轮轴或后轮轴之间的传动系上,或者可以设置在后轮轴上。
4、在最近的后轮驱动、四轮驱动和awd车辆中,为了提高操纵性能和牵引性能,采用双离合器,通过在后轮轴内分别安装左右离合器来独立控制驱动源的动力。
5、正在进行研究以通过在应用双离合器的电动车辆高速滑行时释放离合器的接合来提高电动车辆的能量效率。
6、本公开背景技术中包含的信息仅用于增强对本公开的一般背景的理解,不可视为对这些信息构成本领域技术人员已知的现有技术的承认或任何形式的暗示。
技术实现思路
1、本公开的各方面旨在提供一种包括双离合器的电动车辆的控制方法,其具有通过在应用双离合器的电动车辆滑行时释放离合器的接合来提高能量效率的优点。
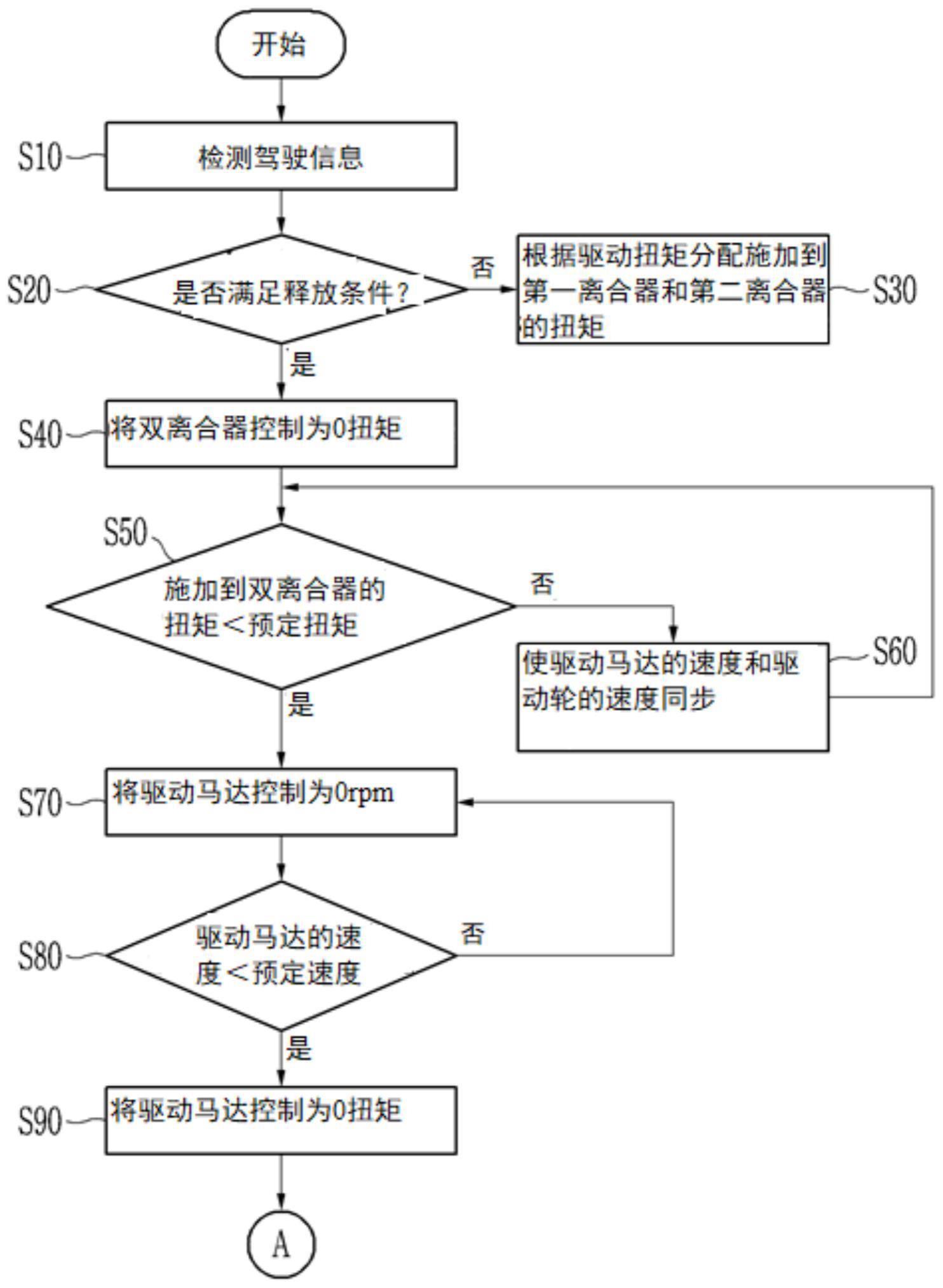
2、根据本公开的各种示例性实施例的一种包括双离合器的电动车辆的控制方法是一种包括用于由驱动马达的动力驱动的电动车辆的双离合器的电动车辆的控制方法。该方法包括:通过离合器控制器,判断是否满足用于释放双离合器的接合的释放条件;通过离合器控制器,当满足释放条件时,将双离合器控制为0扭矩;当施加到双离合器的扭矩小于预定扭矩时,通过车辆控制器,将驱动马达控制为0rpm(每分钟转数);以及当驱动马达的速度小于预定速度时,将驱动马达控制为0扭矩。
3、根据本公开的各种示例性实施例的包括双离合器的电动车辆的控制方法可以进一步包括:通过车辆控制器,在将双离合器控制为0扭矩之后,当施加到双离合器的扭矩大于或等于预定扭矩时,控制以使得驱动马达的速度与车辆的驱动轮的速度同步。
4、当车辆处于高速行驶状态、不包括车辆的加速行驶状态、不包括车辆的制动状态、并且不包括车辆的转弯行驶状态时,可以满足释放条件。
5、转弯行驶状态可以表示车辆的横向加速度(横向g)小于或等于预定加速度、方向盘的转向角小于或等于预定角度或者横摆率小于或等于预定值的状态。
6、根据本公开的各种示例性实施例的包括双离合器的电动车辆的控制方法可以进一步包括:判断是否满足用于接合双离合器的接合条件;当满足接合条件时,使驱动马达的速度与驱动轮的速度同步;以及当驱动马达的速度与驱动轮的速度同步时,施加用于接合双离合器的接合扭矩。
7、施加接合扭矩可以包括当驱动马达的速度与驱动轮的速度之间的速度差小于预定速度时,将用于完全接合双离合器的接合扭矩施加到双离合器。
8、当驱动马达的速度与驱动轮的速度之间的速度差大于或等于预定速度时,离合器控制器可以将小于接合扭矩的预备接合扭矩施加到双离合器。
9、当车辆处于需要转弯行驶的状态、车辆以预定速度行驶的状态、车辆加速行驶的状态或者车辆制动的状态时,可以满足接合条件。
10、本公开的各方面旨在提供一种控制电动车辆的装置,包括:双离合器,被构造成选择性地切断从驱动马达提供到一对驱动轮的动力;驾驶信息检测器,被配置为检测车辆的驾驶信息;车辆控制器,被配置为控制设置在车辆中的驱动马达;以及离合器控制器,被配置为当基于驾驶信息满足释放双离合器的接合的释放条件时,将双离合器控制为0扭矩,当施加到双离合器的扭矩小于预定扭矩时,通过车辆控制器将驱动马达控制为0rpm,并且当驱动马达的速度小于预定速度时,通过车辆控制器将驱动马达控制为0扭矩。
11、离合器控制器可以被配置为通过车辆控制器,当在将双离合器控制为0扭矩后施加到双离合器的扭矩大于或等于预定扭矩时,控制驱动马达的速度与驱动轮的速度同步。
12、当车辆处于高速行驶状态、不包括车辆的加速行驶状态、不包括车辆的制动状态、并且不包括车辆的转弯行驶状态时,可以满足释放条件。
13、转弯行驶状态可以表示车辆的横向加速度小于或等于预定加速度、方向盘的转向角小于或等于预定角度或者横摆率小于或等于预定值的状态。
14、当在车辆滑行的同时满足用于接合离合器的接合条件时,离合器控制器可以被配置为使驱动马达的速度与驱动轮的速度同步,并且当驱动马达的速度与驱动轮的速度同步时,施加用于接合双离合器的接合扭矩。
15、当将接合扭矩施加到双离合器时,离合器控制器可以被配置为当驱动马达的速度与驱动轮的速度之间的速度差小于预定速度时,将用于完全接合双离合器的接合扭矩施加到双离合器。
16、当驱动马达的速度与驱动轮的速度之间的速度差大于或等于预定速度时,离合器控制器可以将小于接合扭矩的预备接合扭矩施加到双离合器。
17、当车辆处于需要转弯行驶的状态、车辆以预定速度行驶的状态、车辆加速行驶的状态或车辆制动的状态时,可以满足接合条件。
18、根据如上所述的根据本公开的各种示例性实施例的包括双离合器的电动车的控制装置和控制方法,可以通过离合器控制器和车辆控制器的协同控制,在电动车辆滑行期间释放双离合器的接合以减小行驶阻力来提高车辆的能量的效率。
19、本公开的方法和装置具有其它特征和优点,这些特征和优点将从一起用于解释本公开的某些原理并入本文的附图和以下具体实施方式中显而易见或在附图和具体实施方式中更详细地阐述。
技术特征:
1.一种包括双离合器的车辆的控制方法,所述双离合器用于由驱动马达的动力驱动的车辆,包括:
2.根据权利要求1所述的方法,进一步包括:
3.根据权利要求1所述的方法,其中,当所述车辆处于高速行驶状态,不包括所述车辆的加速行驶状态,不包括所述车辆的制动状态,并且不包括所述车辆的转弯行驶状态时,满足所述释放条件。
4.根据权利要求3所述的方法,其中,所述转弯行驶状态包括所述车辆的横向加速度小于或等于预定加速度、方向盘的转向角小于或等于预定角度或者横摆率小于或等于预定值的状态。
5.根据权利要求1所述的方法,进一步包括:
6.根据权利要求5所述的方法,其中,施加所述接合扭矩包括当所述驱动马达的速度与所述驱动轮的速度之间的速度差小于预定速度时,将用于完全接合所述双离合器的所述接合扭矩施加到所述双离合器。
7.根据权利要求6所述的方法,其中,当所述驱动马达的速度与所述驱动轮的速度之间的所述速度差大于或等于所述预定速度时,所述离合器控制器将小于所述接合扭矩的预备接合扭矩施加到所述双离合器。
8.根据权利要求5所述的方法,其中,当所述车辆处于需要转弯行驶的状态、所述车辆以预定速度行驶的状态、所述车辆加速行驶的状态或者所述车辆制动的状态时,满足所述接合条件。
9.根据权利要求1所述的方法,其中,当不满足所述释放条件时,所述离合器控制器通过在所述双离合器接合时调节施加到第一离合器和第二离合器的扭矩来控制分配给所述车辆的每个驱动轮的驱动扭矩。
10.一种车辆的控制装置,包括:
11.根据权利要求10所述的装置,其中,所述离合器控制器进一步通过所述车辆控制器,在将所述双离合器控制为0扭矩之后,当施加到所述双离合器的扭矩大于或等于所述预定扭矩时,控制以使得所述驱动马达的速度与所述驱动轮的速度同步。
12.根据权利要求10所述的装置,其中,当所述车辆处于高速行驶状态,不包括所述车辆的加速行驶状态,不包括所述车辆的制动状态,并且不包括所述车辆的转弯行驶状态时,满足所述释放条件。
13.根据权利要求12所述的装置,其中,所述转弯行驶状态包括所述车辆的横向加速度小于或等于预定加速度、方向盘的转向角小于或等于预定角度或者横摆率小于或等于预定值的状态。
14.根据权利要求10所述的装置,其中,当在所述车辆滑行的同时满足用于接合所述离合器的接合条件时,所述离合器控制器使所述驱动马达的速度与驱动轮的速度同步,并且当所述驱动马达的速度与所述驱动轮的速度同步时,施加用于接合所述双离合器的接合扭矩。
15.根据权利要求14所述的装置,其中,当将所述接合扭矩施加到所述双离合器时,当所述驱动马达的速度与所述驱动轮的速度之间的速度差小于预定速度时,所述离合器控制器将用于完全接合所述双离合器的所述接合扭矩施加到所述双离合器。
16.根据权利要求15所述的装置,其中,当所述驱动马达的速度与所述驱动轮的速度之间的所述速度差大于或等于所述预定速度时,所述离合器控制器将小于所述接合扭矩的预备接合扭矩施加到所述双离合器。
17.根据权利要求14所述的装置,其中,当所述车辆处于需要转弯行驶的状态、所述车辆以预定速度行驶的状态、所述车辆加速行驶的状态或者所述车辆制动的状态时,满足所述接合条件。
18.根据权利要求10所述的装置,其中,当不满足所述释放条件时,所述离合器控制器通过在所述双离合器接合时调节施加到第一离合器和第二离合器的扭矩来控制分配给每个驱动轮的驱动扭矩。
技术总结
本申请公开一种包括双离合器的电动车辆的控制方法,该双离合器用于由驱动马达的动力驱动的电动车辆。该方法包括:通过离合器控制器,判断是否满足用于释放双离合器的接合的释放条件;通过离合器控制器,当满足释放条件时,将双离合器控制为0扭矩;当施加到双离合器的扭矩小于预定扭矩时,通过车辆控制器,将驱动马达控制为0rpm;以及当驱动马达的速度小于预定速度时,将驱动马达控制为0扭矩。
技术研发人员:李泰雨,宋挺沅,林成根,朴俊锡,李柊撰,姜宪
受保护的技术使用者:现代自动车株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!