一种基于线路变化新能源混合动力切换系统的制作方法
1.本发明属于新能源技术领域,具体来说,涉及一种基于线路变化新能源混合动力切换系统。
背景技术:
2.随着汽车工业的迅速发展,汽车保有量的持续增加,环境与能源危机的压力日益加剧,普及推广新能源汽车技术是我国解决环境能源问题的有效途径之一。混合动力汽车作为在新能源技术中由传统汽车向纯电动汽车过渡的关键环节,兼具内燃机和蓄电池两种车载能量源,使其具有相对传统车更好的燃油经济性和排放性能以及相对纯电动汽车更长续驶里程的优点,显示出巨大的应用潜力,成为世界各国汽车领域竞相研究的热点。而良好的整车控制策略或方法是实现混合动力汽车高经济性与低排放的关键,对于提高整车性能、降低成本具有重要的意义。但现有新能源混合动力切换系统缺乏实际运行线路的考量,导致满载的公交车上坡无力,长时间采用燃油经济性差。
3.在专利号为cn201310616549.9的中国专利中,公开了一种混合动力城市公交车控制方法,a1、构建行驶参考工况;a2、运用动态规划方法进行离线全局优化;
4.a3、将所得数据和控制参数下载到车辆主控制器;b1、选择行驶参考工况;b2、工况相似度判断;b3、切换控制策略。基于上述模糊控制规则最终得到公交车行驶过程中当实际道路工况或预测运行道路工况与所构建行驶参考工况不相符时的电机驱动转矩和制动转矩,进而求得发动机转矩,并发送到发动机控制单元和电动机控制单元分别控制发动机和电动机输出转矩,进而完成对整车进行控制。
5.现有专利中的缺陷在于,虽然实现了发动机控制单元和电动机控制单元分别控制发动机和电动机输出转矩,进而完成对整车进行控制。但需要公交车行驶路径的大量重复运作多次以后的数据作为参考工况,导致该方法只能适用于部分往复行驶重复路径的情况下使用,并无法实时通过路面或者路径的变化实现混合动力自由切换的效果。
技术实现要素:
6.针对现有技术存在的车辆行驶路径的大量重复运作多次以后的数据作为参考工况问题,本发明提供了一种基于线路变化新能源混合动力切换系统。
7.为实现上述技术目的,本发明采用的技术方案如下:
8.一种基于线路变化新能源混合动力切换系统,包括车辆承载重量测量单元、道路坡度角检测单元、车辆行驶直线速度测量单元、车辆驱动转矩计算单元、电动驱动与燃油驱动判断单元和混合动力切换控制器;
9.车辆承载重量测量单元与车辆驱动转矩计算单元通讯连接,用于测量或者采集车辆车轮承载的质量大小数值;
10.道路坡度角检测单元与车辆驱动转矩计算单元通讯连接,用于采集前一时刻与当前时刻之间车辆行驶路面有无路面倾角的变化,同时采集路面倾角的变化数值;
11.车辆行驶直线速度测量单元与车辆驱动转矩计算单元通讯连接,用于采集车辆行驶直线速度;
12.车辆驱动转矩计算单元,用于计算当前车辆驱动转矩保持上一时刻驱动转矩运行速度时,车辆所需提供的车辆驱动转矩;
13.电动驱动与燃油驱动判断单元,判断路面倾角变化或车辆承载重量变化时,车辆行驶直线速度保持不变所需车辆驱动转矩是否超出电动驱动预设的最大驱动转矩;
14.混合动力切换控制器,控制混合动力驱动过程中,电动驱动和燃油驱动的自动切换。
15.进一步地,采集车辆车轮承载的质量大小数值,通过在车轮与车身承重轴之间的减震杆上设置位移传感器,位移传感器测量减震杆的压缩距离数值与车辆空载的压缩距离数值作比,得到其承重重量之比,获取车辆车轮承载的质量大小数值。
16.进一步地,采集前一时刻与当前时刻之间车辆行驶路面有无路面倾角的变化,通过在车辆底部或者前后两端设置的角度传感器,测量路面与水平面的倾角,得到路面倾角数值。
17.进一步地,采集车辆行驶直线速度,通过在车辆上设置速度传感器实时检测车辆行驶直线速度。
18.进一步地,驱动轮的转矩平衡计算公式为:
[0019][0020]
式中,m
t
为车辆的驱动转矩;f为滚动阻力系数;jw为车轮的转动惯量;为离合器输入端的转动惯量;为离合器输出端的转动惯量;i0为主减速器速比;η0为主减速器传动效率;ic为电机减速器速比;ηc为电机减速器传动效率。
[0021]
进一步地,电动驱动与燃油驱动判断单元的具体判断方法包括步骤:
[0022]
s1、车辆承载重量测量单元采集车辆在行驶过程道路倾角变换;或者乘客上下导致的车轮承载重量变化;
[0023]
s2、道路坡度角检测单元实时采集车辆行驶过程中行驶路面与水平方向的角度变化;
[0024]
s3、车辆行驶直线速度测量单元采集车辆上一时刻行驶直线速度;
[0025]
s4、通过驱动轮的转矩平衡计算公式,计算出上一时刻驱动轮的转矩数值;
[0026]
s5、电动驱动最大驱动轮的转矩数值是否大于上一时刻驱动轮的转矩数值,若大于,则进入步骤s6,若小于或等于,则进入步骤s7;电动驱动最大驱动轮的转矩数值由车辆电池输出的最大功率可转换为车轮的转动惯量;进而求得电动驱动最大驱动轮的转矩数值。
[0027]
s6、电动驱动模式不需要切换为燃油驱动模式;
[0028]
s7、电动驱动模式立即切换为燃油驱动模式。
[0029]
进一步地,混合动力切换控制器的切换方法包括步骤:
[0030]
s10、当电动驱动与燃油驱动判断单元检测到电动驱动最大车辆驱动转矩无法驱动车辆下一时刻以当前运行速度行驶时;
[0031]
s20、连通燃油发动机,启动燃油驱动模式驱动车辆;
[0032]
s30、启动燃油驱动模式驱动车辆后,再切断锂电池连接的电动驱动系统。
[0033]
本发明相比现有技术,具有如下有益效果:
[0034]
通过采集车辆在行驶过程中因为路面坡度、车身承载重量和行驶速度的变化导致车辆驱动转矩的增加,而超过电动驱动的最大输出功率(输出功率与驱动转矩的相互转换),导致电动驱动模式无法提供车辆的正常行驶(下一时刻的行驶速度与无法保持与当前行驶速度持平)。与现有技术相比,无需采用大量重复运作数据作为参考工况,实时根据行驶路况调节混合动力车辆的行驶模式,以达到最优的效率运行车辆的同时,防止电动驱动无法保证车辆的正常行驶;通常只要车辆驱动转矩计算单元计算出下一时刻车辆可以保持当前的运行速度时,即车辆驱动转矩所需驱动功率小于电动驱动的最大输出功率即可切换到电动驱动模式驱动车辆。
附图说明
[0035]
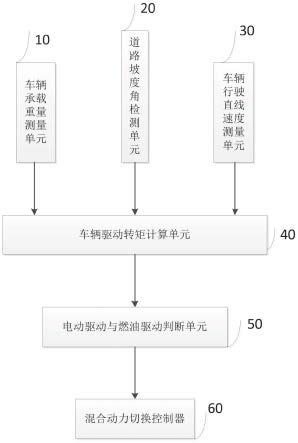
图1为本发明一种基于线路变化新能源混合动力切换系统的结构框图;
[0036]
图2为行驶在一定坡度的路面上的公交车沿直线行驶时的受力分析图;
[0037]
图3为本发明电动驱动与燃油驱动判断单元的具体判断方法流程图;
[0038]
图4为本发明混合动力切换控制器的切换方法的流程图。
[0039]
图中标记说明:10-包括车辆承载重量测量单元,20-道路坡度角检测单元,30-车辆行驶直线速度测量单元,40-车辆驱动转矩计算单元,50-电动驱动与燃油驱动判断单元,60-混合动力切换控制器。
具体实施方式
[0040]
为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
[0041]
如图1所示,本实施例提供了一种基于线路变化新能源混合动力切换系统,包括车辆承载重量测量单元、道路坡度角检测单元、车辆行驶直线速度测量单元、车辆驱动转矩计算单元、电动驱动与燃油驱动判断单元和混合动力切换控制器;
[0042]
车辆承载重量测量单元与车辆驱动转矩计算单元通讯连接,用于测量或者采集车辆车轮承载的质量大小数值;车轮在行驶过程中所需承载车身的质量上升或者降低只有在车辆行驶路面倾角产生变化,或者行驶路面材料产生变化(即滚动阻力系数),导致车辆所需驱动转矩变化。
[0043]
道路坡度角检测单元与车辆驱动转矩计算单元通讯连接,用于采集前一时刻与当前时刻之间车辆行驶路面有无路面倾角的变化,同时采集路面倾角的变化数值。
[0044]
车辆行驶直线速度测量单元与车辆驱动转矩计算单元通讯连接,用于采集车辆行驶直线速度;正常行驶过程中(即没有驾驶员离合器的制动减速行为时)下一时刻的行驶速
度与当前行驶速度保持一致。
[0045]
车辆驱动转矩计算单元,用于计算当前车辆驱动转矩保持上一时刻驱动转矩运行速度时,车辆所需提供的车辆驱动转矩。
[0046]
电动驱动与燃油驱动判断单元,判断路面倾角变化或车辆承载重量变化时,车辆行驶直线速度保持不变所需车辆驱动转矩是否超出电动驱动预设的最大驱动转矩。
[0047]
混合动力切换控制器,控制混合动力驱动过程中,电动驱动和燃油驱动的自动切换。
[0048]
采集车辆车轮承载的质量大小数值,通过在车轮与车身承重轴之间的减震杆上设置位移传感器,位移传感器测量减震杆的压缩距离数值与车辆空载的压缩距离数值作比,得到其承重重量之比,获取车辆车轮承载的质量大小数值。减震杆或者车轮轴上无伸缩变化部位设置距离传感器,采集减震杆受车辆承重重量或者行驶路面坡度等因素的变化导致的减震杆伸缩距离发生变化,进而计算得到车轮承载的质量大小数值。
[0049]
采集前一时刻与当前时刻之间车辆行驶路面有无路面倾角的变化,通过在车辆底部或者前后两端设置的角度传感器,测量路面与水平面的倾角,得到路面倾角数值。正常行驶的车辆车路承载重量变化主要是由道路坡度变化导致的。
[0050]
采集车辆行驶直线速度,通过在车辆上设置速度传感器实时检测车辆行驶直线速度。
[0051]
如图2所示,对行驶在一定坡度的路面上时,车辆纵向动力学模型用于计算混合动力客车在动力系统不同动力输出下的纵向行驶速度。本文仅考虑车辆的纵向运动特性,忽略车辆的操纵稳定性和平顺性。混合动力客车在行驶过程中主要受到动力系统的驱动力和行驶阻力的作用,其沿直线行驶时的受力情况。
[0052]
图中,m为车辆的满载质量;g为车辆重力;a为道路坡度角;fw为空气阻力;m
f1
、m
f2
为作用在前、后轮上的滚动阻力偶矩;m
jw1
、m
jw2
为作用在前、后轮上的惯性阻力偶矩;f
zw1
、f
zw1
为位于前、后轮接地点上方的空气升力;f
z1
、f
z2
。为作用在前、后轮上的地面法向反力;f
x1
、f
x2
。为作用在前、后轮上的地面切向反力;v为车辆的纵向行驶速度。
[0053]
根据车辆前轮和后轮的受力平衡,可得到前轮和后轮的纵向力f
x1
、f
x2
;对于从动轮前轮有:
[0054][0055]
式中,rr为车轮的滚动半径。
[0056]
对于驱动轮后轮有:
[0057][0058]
驱动轮的转矩平衡计算公式为:
[0059][0060]
式中,m
t
为车辆的驱动转矩;f为滚动阻力系数,滚动阻力系数即为轮胎-路面附着系统,通过拍摄路面图片发送至远端图像分析平台,获取路面采用的材料,进而与预设的滚动阻力系数相匹配,如潮湿混凝土和沥青路面为0.7,干混凝土和沥青路面为0.8,土路面为0.55,雪路面为0.2,冰路面为0.1;jw为车轮的转动惯量;为离合器输入端的转动惯量;为离合器输出端的转动惯量;i0为主减速器速比;η0为主减速器传动效率;ic为电机减速器速比;ηc为电机减速器传动效率。
[0061]
如图3所示,电动驱动与燃油驱动判断单元的具体判断方法包括步骤:
[0062]
s1、车辆承载重量测量单元采集车辆在行驶过程道路倾角变换;或者乘客上下导致的车轮承载重量变化,为了保证公交车能以最低运行时速,判断当前电动驱动能否满足公交车能以最低运行时速运行。
[0063]
s2、道路坡度角检测单元实时采集车辆行驶过程中行驶路面与水平方向的角度变化;s3、车辆行驶直线速度测量单元采集车辆上一时刻行驶直线速度;s4、通过驱动轮的转矩平衡计算公式,计算出上一时刻驱动轮的转矩数值。
[0064]
s5、电动驱动最大驱动轮的转矩数值是否大于上一时刻驱动轮的转矩数值,若大于,则进入步骤s6,若小于或等于,则进入步骤s7;电动驱动最大驱动轮的转矩数值由车辆电池输出的最大功率可转换为车轮的转动惯量;进而求得电动驱动最大驱动轮的转矩数值。
[0065]
s6、电动驱动模式不需要切换为燃油驱动模式;s7、电动驱动模式立即切换为燃油驱动模式。
[0066]
如图4所示,混合动力切换控制器的切换方法包括步骤:s10、当电动驱动与燃油驱动判断单元检测到电动驱动最大车辆驱动转矩无法驱动车辆下一时刻以当前运行速度行驶时;s20、连接燃油发动机启动控制电路,启动燃油驱动模式驱动车辆;
[0067]
s30、启动燃油驱动模式驱动车辆后,再切断锂电池连接的电动驱动系统。防止先切断锂电池连接的电动驱动系统可能导致供能不足,车辆导致停止或者后退。
[0068]
本发明相比现有技术,具有如下有益效果:
[0069]
通过采集车辆在行驶过程中因为路面坡度、车身承载重量和行驶速度的变化导致车辆驱动转矩的增加,而超过电动驱动的最大输出功率(输出功率与驱动转矩的相互转换),导致电动驱动模式无法提供车辆的正常行驶(下一时刻的行驶速度与无法保持与当前行驶速度持平)。与现有技术相比,无需采用大量重复运作数据作为参考工况,实时根据行驶路况调节混合动力车辆的行驶模式,以达到最优的效率运行车辆的同时,防止电动驱动无法保证车辆的正常行驶;通常只要车辆驱动转矩计算单元计算出下一时刻车辆可以保持当前的运行速度时,即车辆驱动转矩所需驱动功率小于电动驱动的最大输出功率即可切换到电动驱动模式驱动车辆。
[0070]
以上对本技术提供的一种基于线路变化新能源混合动力切换系统进行了详细介绍。具体实施例的说明只是用于帮助理解本技术的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以对本技术进行若干改进和修饰,这些改进和修饰也落入本技术权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1