控制车辆在隧道内行驶的方法、装置、设备、介质及产品与流程
本技术涉及自动驾驶,特别是涉及一种控制车辆在隧道内行驶的方法、装置、设备、介质及产品。
背景技术:
1、随着汽车产业的快速发展和汽车数量的不断攀升,自动驾驶技术飞速发展。通常,可实现自动驾驶的车辆都设置有自动驾驶系统,通过自动驾驶系统规划车辆的行驶信息(例如,行驶路径、速度、航向角等),然后车辆的执行器基于行驶信息完成自动驾驶过程。
2、相关技术中,对于无卫星定位信号或者卫星定位信号较差的车辆行驶场景,主要通过摄像设备采集环境图像,然后自动驾驶系统对环境图像进行一系列处理来规划车辆的行驶信息。然而,采用相关技术获取到的行驶信息规划不精准。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种控制车辆在隧道内行驶的方法、装置、设备、介质及产品,能够提高行驶信息规划的精准度。
2、第一方面,本技术提供了一种控制车辆在隧道内行驶的方法,该方法包括:
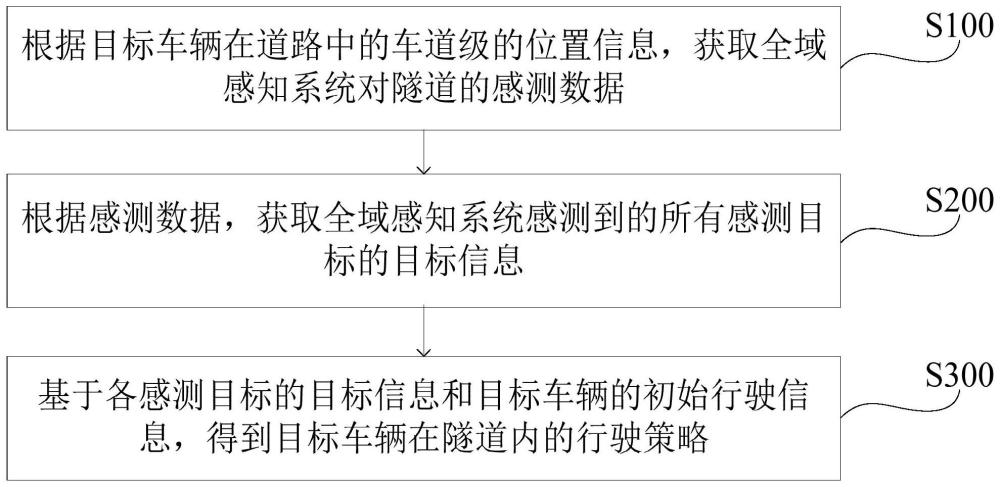
3、根据目标车辆在道路中的车道级的位置信息,获取全域感知系统对隧道的感测数据;全域感知系统包括多个智慧基站,多个智慧基站的感知范围协同覆盖隧道内道路区域;
4、根据感测数据,获取全域感知系统感测到的所有感测目标的目标信息;
5、基于各感测目标的目标信息和目标车辆的初始行驶信息,得到目标车辆在隧道内的行驶策略;行驶策略用于控制车辆在隧道内行驶。
6、在其中一个实施例中,目标信息包括速度信息和位置信息;基于各感测目标的目标信息和目标车辆的初始行驶信息,得到目标车辆在隧道内的行驶策略,包括:
7、根据各感测目标的目标信息,确定隧道内的驾驶影响事件以及目标车辆的驾驶影响目标;
8、基于驾驶影响事件、驾驶影响目标和目标车辆的初始行驶信息,确定目标车辆在隧道内的行驶策略。
9、在其中一个实施例中,驾驶影响目标包括目标车辆的前方目标;基于驾驶影响事件、驾驶影响目标和目标车辆的初始行驶信息,确定目标车辆在隧道内的行驶策略,包括:
10、获取目标车辆的前方目标的速度信息和位置信息;
11、根据前方目标的速度信息和位置信息,对目标车辆的初始行驶信息进行动态调整,得到第一行驶信息;
12、判断目标车辆是否需要在当前车道继续行驶;
13、根据判断结果和第一行驶信息,确定目标车辆的行驶策略。
14、在其中一个实施例中,判断目标车辆是否需要在当前车道继续行驶,包括
15、检测前方目标的目标类型,目标类型包括动态目标或者是静态目标;
16、若前方目标为动态目标,且初始行驶信息中为直行路径,则确定目标车辆需要在当前车道继续行驶;
17、若前方目标为静态目标,和/或,初始行驶信息中为变道路径,则目标车辆需要变道到当前车道的相邻车道上行驶。
18、在其中一个实施例中,行驶策略包括目标行驶信息;根据判断结果和第一行驶信息,确定目标车辆的目标行驶信息,包括:
19、若目标车辆需要在当前车道继续行驶,则根据第一行驶信息和当前车道上的行驶路径得到目标行驶信息;或者,
20、若目标车辆需要变道到当前车道的相邻车道上行驶,则获取目标车辆从当前车道到相邻车道的变道行驶路径,根据变道行驶路径和第一行驶信息得到目标行驶信息。
21、在其中一个实施例中,获取目标车辆从当前车道到相邻车道的变道行驶路径,包括:
22、获取相邻车道中各相邻目标的位置信息;
23、根据目标车辆的位置信息和相邻车道中各相邻目标的位置信息,生成变道行驶路径。
24、在其中一个实施例中,在获取目标车辆从当前车道到相邻车道的变道行驶路径,包括:
25、根据目标车辆的位置信息和速度信息,以及相邻车道中各相邻目标的位置信息和速度信息,检测相邻车道中各相邻目标是否为阻挡目标,阻挡目标表示阻挡目标车辆从当前车道变道至相邻车道的目标;
26、若是,则获取目标车辆与相邻车道中各相邻目标的碰撞风险量化值;
27、若碰撞风险量化值小于预设风险量化阈值,则执行获取目标车辆从当前车道到相邻车道的变道行驶路径的步骤。
28、在其中一个实施例中,上述方法还包括:
29、获取道路的道路地图;
30、根据道路地图获取道路中各车道的属性信息;
31、根据各车道的属性信息,规划目标车辆行驶时的初始行驶信息。
32、在其中一个实施例中,根据各车道的属性信息,规划目标车辆行驶时的初始行驶信息,包括:
33、根据每个车道的属性信息,规划目标车辆在各车道上行驶时对应的候选行驶信息;
34、获取目标车辆按照各候选行驶信息在对应车道上行驶时的通行效率;
35、从候选行驶信息中筛选通行效率满足行驶信息筛选条件的行驶信息,得到初始行驶信息。
36、在其中一个实施例中,根据目标车辆在道路中的车道级的位置信息,获取全域感知系统对隧道的感测数据,包括:
37、根据目标车辆在道路中的车道级的位置信息,确定目标车辆在道路上的目标行驶范围;
38、获取目标行驶范围对应的全域感知系统中的目标智慧基站,并获取目标智慧基站对隧道的感测数据。
39、第二方面,本技术提供了一种控制车辆在隧道内行驶的装置,该装置包括:
40、根据目标车辆在道路中的车道级的位置信息,获取全域感知系统对隧道的感测数据;全域感知系统包括多个智慧基站,多个智慧基站的感知范围协同覆盖隧道内道路区域;
41、根据感测数据,获取全域感知系统感测到的所有感测目标的目标信息;
42、基于各感测目标的目标信息和目标车辆的初始行驶信息,得到目标车辆在隧道内的行驶策略;行驶策略用于控制车辆在隧道内行驶。
43、第三方面,本技术还提供了一种计算机设备,充电控制设备包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现上述第一方面的任一项的方法的步骤。
44、第四方面,本技术还提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现上述第一方面的任一项的方法的步骤。
45、第五方面,本技术还提供了一种计算机程序产品,计算机程序产品包括计算机程序,该计算机程序被处理器执行时实现上述第一方面的任一项的方法的步骤。
46、上述控制车辆在隧道内行驶的方法、装置、设备、介质及产品,计算机设备可以根据目标车辆在道路中的车道级的位置信息,获取全域感知系统对隧道的感测数据,根据感测数据获取全域感知系统感测到的所有感测目标的目标信息,并基于各感测目标的目标信息和目标车辆的初始行驶信息,得到目标车辆在隧道内的行驶策略;该方法可以通过在gps卫星信号差或者无gps卫星信号的环境中设置的智慧基站检测到的感测数据以及车辆预先规划好的初始行驶信息,来精准规划车辆在gps卫星信号差或者无gps卫星信号的环境中实时行驶时对应的行驶策略,并且能够避免因行驶策略规划不准确导致交通事件的发生,提高车辆行驶过程中的安全性;同时,该方法仅需要通过设置的智慧基站来辅助规划gps卫星信号差或者无gps卫星信号的环境中车辆的行驶策略,并不需要复杂的处理过程就能够规划车辆的行驶策略,从而能够提高规划gps卫星信号差或者无gps卫星信号的环境中车辆的行驶策略的速度和效率;再者,该方法可以完全接管规划自动驾驶车辆的行驶策略,解决自动驾驶车辆无法在gps卫星信号差或者无gps卫星信号的场景中安全、快速行驶的问题。
- 还没有人留言评论。精彩留言会获得点赞!