车辆驾驶控制方法、驾驶模式切换方法、装置及相关产品与流程
本技术涉及交通,特别是涉及一种车辆驾驶控制方法、驾驶模式切换方法、装置及相关产品。
背景技术:
1、随着社会的发展,人们生活水平在不断提高,人们的用车需求也越来越大。为了缓解驾驶员驾驶疲劳的情况,自动驾驶系统随之发展起来,在一定程度上能够代替驾驶员手动驾驶。
2、但是,当前自动驾驶处于初始阶段,自动驾驶过程中驾驶策略僵化,导致车辆存在安全隐患的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种车辆驾驶控制方法、驾驶模式切换方法、装置及相关产品,能够解决车辆在自动驾驶过程中驾驶策略僵化、安全隐患等问题。
2、第一方面,本技术提供了一种车辆驾驶控制方法,车辆包括自动驾驶模块,自动驾驶模块用于支持自动驾驶,该方法包括:
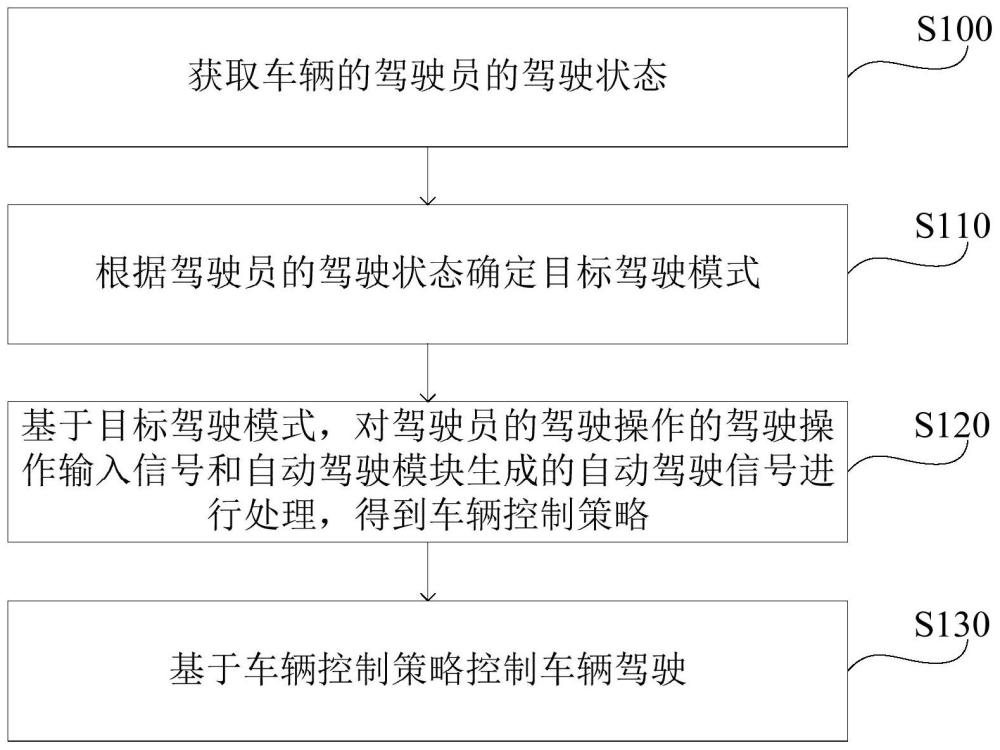
3、获取车辆的驾驶员的驾驶状态;
4、根据驾驶员的驾驶状态确定目标驾驶模式;目标驾驶模式包括手动驾驶模式、低级自动驾驶模式或高级自动驾驶模式;
5、基于目标驾驶模式,对驾驶员的驾驶操作的驾驶操作输入信号和自动驾驶模块生成的自动驾驶信号进行处理,得到车辆控制策略;车辆控制策略包括车辆在目标驾驶模式下驾驶时车辆执行器的控制信息;
6、基于车辆控制策略控制车辆驾驶。
7、在其中一个实施例中,基于目标驾驶模式,对驾驶员的驾驶操作的驾驶操作输入信号和自动驾驶模块生成的自动驾驶信号进行处理得到车辆控制策略,包括:
8、获取车辆在目标驾驶模式下驾驶操作输入信号的第一权重系数,以及自动驾驶信号的第二权重系数;
9、根据驾驶操作输入信号、第一权重系数、自动驾驶信号和第二权重系数,确定车辆控制策略。
10、在其中一个实施例中,若目标驾驶模式为手动驾驶模式,则第二权重系数为预设的第一阈值;若目标驾驶模式为高级自动驾驶模式,则第一权重系数为第一阈值。
11、在其中一个实施例中,车辆执行器包括制动踏板和加速踏板;获取车辆的驾驶员的驾驶状态,包括:
12、若检测到车辆的制动踏板的制动控制量大于或等于预设的制动控制量阈值,则获取驾驶员的驾驶状态,制动控制量阈值为通过自动驾驶算法确定的标准制动控制量得到的;或者,
13、若检测到的车辆的加速踏板的加速控制量大于或等于预设的加速控制量阈值,则获取驾驶员的驾驶状态,加速控制量阈值为通过自动驾驶算法确定的标准加速控制量得到的。
14、在其中一个实施例中,上述方法还包括:
15、接收车辆的启动信号,初始化车辆的驾驶模式为手动驾驶模式。
16、在其中一个实施例中,根据驾驶员的驾驶状态确定目标驾驶模式,包括:
17、根据车辆所处道路的环境信息,确定道路环境参数;道路环境参数表征车辆所处道路环境的复杂度;
18、根据道路环境参数和驾驶员的驾驶状态确定目标驾驶模式。
19、在其中一个实施例中,上述方法还包括:
20、通过车载显示设备显示车辆当前的驾驶模式。
21、本技术实施例的技术方案中,可以获取车辆的驾驶员的驾驶状态,根据驾驶员的驾驶状态确定目标驾驶模式,基于目标驾驶模式,对驾驶员的驾驶操作的驾驶操作输入信号和自动驾驶模块生成的自动驾驶信号进行处理,得到车辆控制策略,并基于车辆控制策略控制车辆驾驶;该方法在车辆驾驶过程中,可以根据驾驶员的实际驾驶状态调整车辆当前的驾驶模式,使得车辆不仅能够在驾驶员完全参与的驾驶模式下驾驶,还能够在驾驶员部分参与的驾驶模式和驾驶员不参与的驾驶模式下驾驶,从而使得车辆在驾驶过程中的驾驶策略可灵活调整,还能够保证车辆安全驾驶,解决了车辆在自动驾驶过程中驾驶策略僵化以使车辆存在安全隐患的问题;另外,该方法可以根据车辆内驾驶员的驾驶状态灵活调整车辆的驾驶模式,使得驾驶员的疲劳程度较大时也能够让车辆安全驾驶,提高车辆驾驶时的安全性。
22、第二方面,本技术提供了一种驾驶模式切换方法,该方法包括:
23、在车辆按照车辆控制策略驾驶的过程中,若检测到车辆的车辆执行器存在外力控制,则获取车辆执行器在外力控制下产生的控制量和车辆内驾驶员的驾驶状态;车辆控制策略为如上述权利要求1-7中任一项的方法中的步骤确定的;
24、根据车辆执行器在外力控制下产生的控制量和车辆内驾驶员的驾驶状态,控制车辆的驾驶模式进行模式切换。
25、在其中一个实施例中,根据车辆执行器在外力控制下产生的控制量和车辆内驾驶员的驾驶状态,控制车辆的驾驶模式进行模式切换,包括:
26、检测控制量是否满足预设的控制条件;
27、若控制量满足控制条件,则根据驾驶状态与驾驶模式的映射关系,获取驾驶员的驾驶状态对应的目标驾驶模式,并控制车辆当前的驾驶模式切换为目标驾驶模式;
28、若控制量不满足控制条件,则控制车辆保持驾驶模式不变。
29、在其中一个实施例中,获取驾驶员的驾驶状态对应的目标驾驶模式,包括:
30、若驾驶状态为高疲劳状态,则确定目标驾驶模式为高级自动驾驶模式;高级自动驾驶模式表示驾驶员不参与的驾驶模式;
31、若驾驶状态为低疲劳状态,则确定目标驾驶模式为低级自动驾驶模式;低级自动驾驶模式表示驾驶员部分参与的驾驶模式;
32、若驾驶状态为不疲劳状态,则确定目标驾驶模式为手动驾驶模式;手动驾驶模式表示驾驶员完全参与的驾驶模式。
33、在其中一个实施例中,车辆执行器包括制动踏板和加速踏板,控制量包括制动踏板的制动控制量和加速踏板的加速控制量;
34、检测控制量是否满足预设的控制条件,包括:
35、若制动控制量大于或等于预设的制动控制量阈值,且加速控制量大于或等于预设的加速控制量阈值,则确定控制量满足控制条件;
36、若制动控制量小于制动控制量阈值,且加速控制量小于加速控制量阈值,则确定控制量不满足控制条件。
37、在其中一个实施例中,获取车辆内驾驶员的驾驶状态,包括:
38、获取车辆内驾驶员的人脸图像;
39、对人脸图像中的面部表情和眼睛状态进行识别;
40、根据面部表情和眼睛状态的识别结果确定驾驶员的驾驶状态。
41、在其中一个实施例中,上述方法还包括:
42、在车辆以手动驾驶模式驾驶的过程中,若检测到用户对车辆触发了自动模式切换指令,则控制将车辆从手动驾驶模式切换为自动驾驶模式。
43、在其中一个实施例中,自动驾驶模式包括高级自动驾驶模式和低级自动驾驶模式,控制将车辆从手动驾驶模式切换为自动驾驶模式,包括:
44、若车辆内驾驶员的驾驶状态为高疲劳状态,则控制将车辆从手动驾驶模式切换为高级自动驾驶模式;
45、若车辆内驾驶员的驾驶状态为低疲劳状态,则控制将车辆从手动驾驶模式切换为低级自动驾驶模式。
46、本技术实施例的技术方案中,可以在车辆按照车辆控制策略驾驶的过程中,若检测到车辆的车辆执行器存在外力控制,则获取车辆执行器在外力控制下产生的控制量和车辆内驾驶员的驾驶状态,并根据车辆执行器在外力控制下产生的控制量和车辆内驾驶员的驾驶状态,控制车辆的驾驶模式进行模式切换;该方法可以根据车辆执行器在外力控制下产生的控制量和车辆内驾驶员的驾驶状态,共同确定控制车辆当前的驾驶模式进行模式切换,提高了车辆驾驶模式切换的准确度;同时,还能够避免因驾驶员误撞车辆执行器而切换车辆的驾驶模式,造成车辆不安全驾驶的问题,从而能够提高车辆在驾驶过程中的安全性;再者,该方法可以根据驾驶员的驾驶意图切换车辆的驾驶模式,使得车辆在驾驶过程中驾驶策略能够根据实际情况任意调整,解决了车辆在驾驶过程中驾驶策略僵化的问题。
47、第三方面,本技术提供了一种车辆驾驶控制装置,车辆包括自动驾驶模块,自动驾驶模块用于支持自动驾驶,该装置包括:
48、驾驶状态获取模块,用于获取车辆的驾驶员的驾驶状态;
49、驾驶模式确定模块,用于根据驾驶员的驾驶状态确定目标驾驶模式;目标驾驶模式包括手动驾驶模式、低级自动驾驶模式或高级自动驾驶模式;
50、处理模块,用于基于目标驾驶模式,对驾驶员的驾驶操作的驾驶操作输入信号和自动驾驶模块生成的自动驾驶信号进行处理,得到车辆控制策略;车辆控制策略包括车辆在目标驾驶模式下驾驶时车辆执行器的控制信息;
51、驾驶控制模块,用于基于车辆控制策略控制车辆驾驶。
52、第四方面,本技术提供了一种驾驶模式切换装置,该装置包括:
53、控制量获取模块,用于在车辆按照车辆控制策略驾驶的过程中,若检测到车辆的车辆执行器存在外力控制,则获取车辆执行器在外力控制下产生的控制量和车辆内驾驶员的驾驶状态;车辆控制策略为通过上述第一方面的任一项的方法的步骤确定的;
54、模式切换模块,用于根据车辆执行器在外力控制下产生的控制量和车辆内驾驶员的驾驶状态,控制车辆的驾驶模式进行模式切换。
55、第五方面,本技术还提供了一种计算机设备,计算机设备包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现上述第一方面和第二方面的任一项的方法的步骤。
56、第六方面,本技术还提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现上述第一方面和第二方面的任一项的方法的步骤。
57、第七方面,本技术还提供了一种计算机程序产品,计算机程序产品包括计算机程序,该计算机程序被处理器执行时实现上述第一方面和第二方面的任一项的方法的步骤。
- 还没有人留言评论。精彩留言会获得点赞!