能量回收的控制方法、装置、设备以及计算机可读介质与流程
本发明涉及汽车,尤其涉及一种能量回收的控制方法、装置、设备以及计算机可读介质。
背景技术:
1、滑行能量回收是指车辆在惯性作用下滑行时回收部-分动能给电池充电的技术。滑行能量回收通常应用于纯电动汽车、混合动力汽车等新能源汽车中,通过滑行能量回收可为汽车的电池充电,提高了汽车的续航能力。
2、然而,当汽车在制动工况下触发防抱死制动系统(antilock brake system,abs)时,汽车的整车控制器(vehicle control unit,vcu)为了保障汽车车身的稳定,会控制汽车在本次制动过程中的滑行能量回收扭矩骤降为0,即不进行滑行能量回收。当滑行能量回收扭矩骤降为0时,汽车的制动力明显下降,汽车的减速度会出现明显的减小,进而导致驾驶员会明显感受到汽车的制动效果减弱,即出现了欠制动问题。
技术实现思路
1、有鉴于此,本发明实施例提供一种能量回收的控制方法、装置、设备以及计算机可读介质,以解决欠制动问题。
2、为实现上述目的,本发明实施例提供如下技术方案:
3、第一方面,本申请公开了一种能量回收的控制方法,包括:
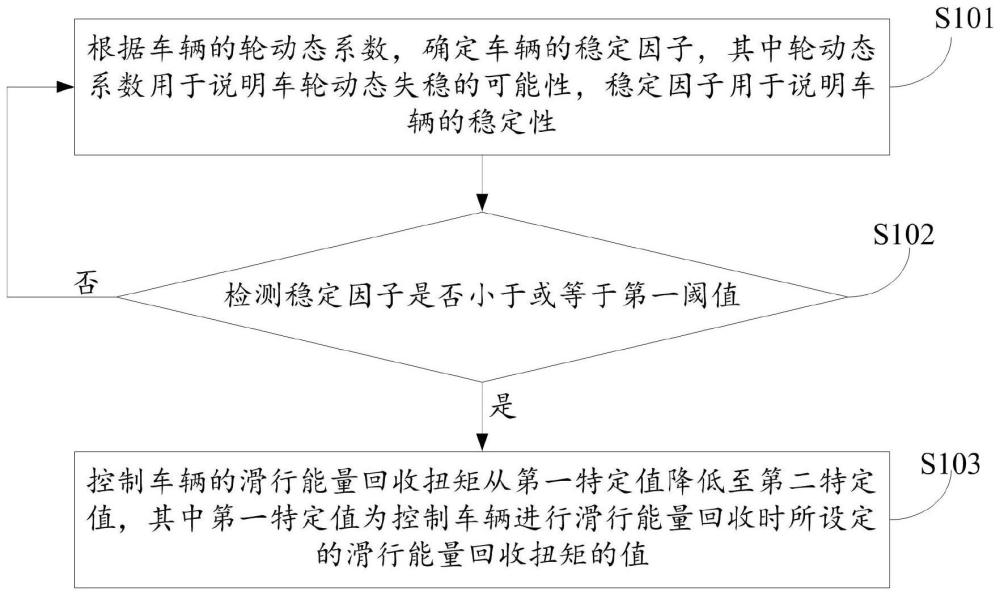
4、根据车辆的轮动态系数,确定车辆的稳定因子;其中,所述轮动态系数用于说明车轮动态失稳的可能性;所述稳定因子用于说明车辆的稳定性;
5、若检测到所述稳定因子小于或等于第一阈值,则控制所述车辆的滑行能量回收扭矩从第一特定值降低至第二特定值;其中,所述第一特定值为控制所述车辆进行滑行能量回收时所设定的滑行能量回收扭矩的值。
6、可选地,在上述能量回收的控制方法中,所述第二特定值根据所述稳定因子确定。
7、可选地,在上述能量回收的控制方法中,所述若检测到所述稳定因子小于或等于第一阈值,则控制所述车辆的滑行能量回收扭矩从第一特定值降低至第二特定值之后,还包括:
8、在控制所述车辆的滑行能量回收扭矩从第一特定值降低至第二特定值的过程中,若检测到所述稳定因子大于或等于第二阈值,则控制所述车辆的滑行能量回收扭矩从所述第二特定值增加至所述第一特定值。
9、可选地,在上述能量回收的控制方法中,所述控制所述车辆的滑行能量回收扭矩从第一特定值降低至第二特定值,包括:
10、按照第一预设斜率,将所述车辆的滑行能量回收扭矩从第一特定值降低至第二特定值。
11、可选地,在上述能量回收的控制方法中,所述根据车辆的轮动态系数,确定车辆的稳定因子之前,还包括:
12、识别车辆的行驶路面工况;
13、其中,所述若检测到所述稳定因子小于或等于第一阈值,则控制所述车辆的滑行能量回收扭矩从第一特定值降低至第二特定值,包括:
14、若检测到所述稳定因子小于或等于第一阈值、且识别到所述车辆的行驶路面工况为高附着减速坡形路障工况,则控制所述车辆的滑行能量回收扭矩从第一特定值降低至第二特定值;
15、所述识别所述车辆的行驶路面工况之后,还包括:
16、若检测到所述稳定因子小于或等于第三阈值、且识别到所述车辆的行驶路面工况为低附打滑工况,则控制所述车辆的滑行能量回收扭矩从第一特定值降低至0,直至再次接收到制动信号为止。
17、可选地,在上述能量回收的控制方法中,所述控制所述车辆的滑行能量回收扭矩从第一特定值降低至0,包括:
18、按照第二预设斜率,将所述车辆的滑行能量回收扭矩从第一特定值降低至0。
19、可选地,在上述能量回收的控制方法中,所述根据车辆的轮动态系数,确定车辆的稳定因子,包括:
20、获取车辆的车身电子稳定系统中各个控制模块的相关稳定系数;其中,所述控制模块的相关稳定系数由所述控制模块根据车辆的轮动态系数确定;所述轮动态系数由所述控制模块根据所述前后轴状态参数计算得到;所述前后轴状态参数包括:所述车辆的前轴轴速、后轴轴速、前轮轮速、后轮轮速以及加速度中的至少一种参数;
21、从各个控制模块的相关稳定系数中选取出最小值,确定为车辆的稳定因子。
22、第二方面,本申请公开了一种能量回收的控制装置,包括:
23、确定单元,用于根据车辆的轮动态系数,确定车辆的稳定因子;其中,所述轮动态系数用于说明车轮动态失稳的可能性;所述稳定因子用于说明车辆的稳定性;
24、第一控制单元,用于若检测到所述稳定因子小于或等于第一阈值,则控制所述车辆的滑行能量回收扭矩从第一特定值降低至第二特定值;其中,所述第一特定值为控制所述车辆进行滑行能量回收时所设定的滑行能量回收扭矩的值。
25、第三方面,本申请公开了一种计算机可读介质,其上存储有计算机程序,其中,所述程序被处理器执行时实现如上述第一方面中任一所述的方法。
26、第四方面,本申请公开了一种能量回收的控制设备,包括:
27、一个或多个处理器;
28、存储装置,其上存储有一个或多个程序;
29、当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述第一方面中任一所述的方法。
30、基于上述本发明实施例提供的能量回收的控制方法,根据车辆的轮动态系数,确定车辆的稳定因子。由于轮动态系数用于说明车轮动态失稳的可能性,因此能够得到用于说明车辆的稳定性的稳定因子。进而可以在检测到稳定因子小于或等于第一阈值时,确定出车辆具有失稳风险,然后控制车辆的滑行能量回收扭矩从第一特定值降低至第二特定值,以实现撤销至少部分滑行能量回收,保障车辆的稳定性。本申请中,仅在检测到稳定因子小于或等于第一阈值时,认为车辆存在失稳的风险,才撤销至少滑行能量回收。而不是像现有技术一样以触发abs为条件撤销所有滑行能量回收,许多情况下触发abs时未必车辆会存在失稳风险,因此本申请实施例中使用稳定因子小于或等于第一阈值来作为撤销至少部分滑行能量回收的条件,可避免在触发了abs但车辆稳定性未受影响的场景下完全撤销滑行能量回收,减少欠制动问题的出现,提升了驾驶员的驾驶体验。
技术特征:
1.一种能量回收的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述第二特定值根据所述稳定因子确定。
3.根据权利要求1所述的方法,其特征在于,所述若检测到所述稳定因子小于或等于第一阈值,则控制所述车辆的滑行能量回收扭矩从第一特定值降低至第二特定值之后,还包括:
4.根据权利要求1所述的方法,其特征在于,所述控制所述车辆的滑行能量回收扭矩从第一特定值降低至第二特定值,包括:
5.根据权利要求1至4任一所述的方法,其特征在于,所述根据车辆的轮动态系数,确定车辆的稳定因子之前,还包括:
6.根据权利要求5所述的方法,其特征在于,所述控制所述车辆的滑行能量回收扭矩从第一特定值降低至0,包括:
7.根据权利要求1所述的方法,其特征在于,所述根据车辆的轮动态系数,确定车辆的稳定因子,包括:
8.一种能量回收的控制装置,其特征在于,包括:
9.一种计算机可读介质,其特征在于,其上存储有计算机程序,其中,所述程序被处理器执行时实现如权利要求1至7中任一所述的方法。
10.一种能量回收的控制设备,其特征在于,包括:
技术总结
本发明提供一种能量回收的控制方法、装置、设备以及计算机可读介质,该方法根据车辆的轮动态系数,确定车辆的稳定因子;其中,所述轮动态系数用于说明车轮动态失稳的可能性;所述稳定因子用于说明车辆的稳定性;若检测到所述稳定因子小于或等于第一阈值,则控制所述车辆的滑行能量回收扭矩从第一特定值降低至第二特定值;其中,所述第一特定值为控制所述车辆进行滑行能量回收时所设定的滑行能量回收扭矩的值。本申请实施例中使用稳定因子小于或等于第一阈值来作为撤销至少部分滑行能量回收的条件,可避免在触发了ABS但车辆稳定性未受影响的场景下完全撤销滑行能量回收,减少欠制动问题的出现,提升了驾驶员的驾驶体验。
技术研发人员:杨志甲,徐崇,朱睿
受保护的技术使用者:上海汽车集团股份有限公司
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!