一种用于无人驾驶车辆的自动卸货控制装置及控制方法与流程
本发明属于车辆工程,具体涉及一种用于无人驾驶车辆的自动卸货控制装置及控制方法。
背景技术:
1、随着汽车工业的发展,无人驾驶是发展趋势,尤其在运营场景相对单一的封闭厂区内,以码头、矿区为代表运输集装箱、砂石料、煤、铁粉等无人驾驶车辆已逐步投入运营。目前,无人驾驶车辆在行驶、避障、经停等控制底盘的技术已日渐成熟,但车辆在智能化卸货方面还存在严重不足。现有运输砂石料、煤、铁粉的车辆卸货方式主要分为举升货箱与采用车辆卸货装置两种,其中装备卸货装置的车辆大都由工作人员操作遥控器控制货箱电动尾门与卸货装置达到卸货目的。人工操作卸货与无人化运营目的相违背且增加人力资源成本。
技术实现思路
1、本发明所要解决的技术问题是克服现有技术的不足,提供一种用于无人驾驶车辆的自动卸货控制装置,无人卸货方案中兼顾考虑人工卸货,使车辆出现异常时人工可及时接管,保障车辆运营安全。
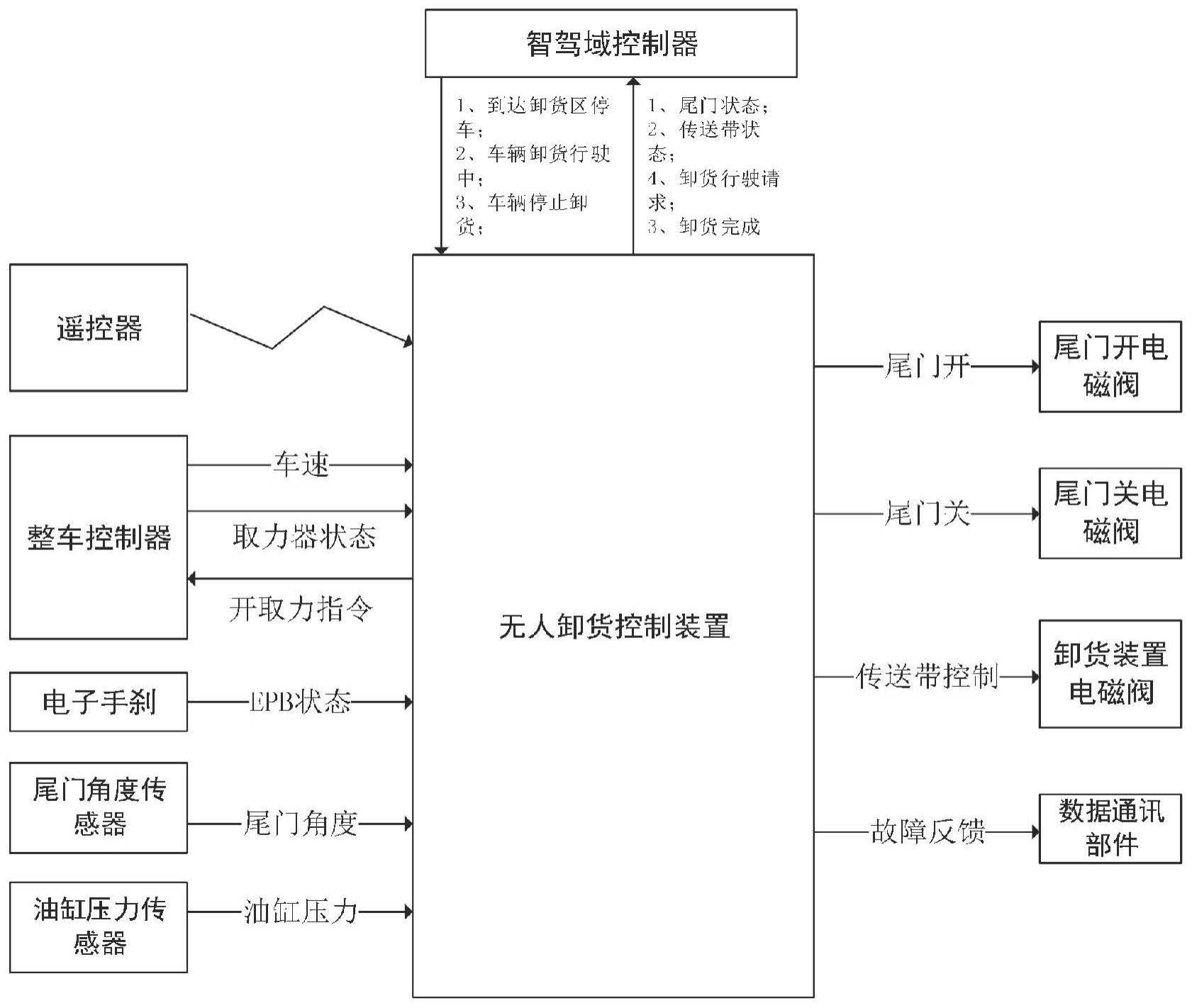
2、本发明提供一种用于无人驾驶车辆的自动卸货控制装置及控制方法,包括无人卸货控制装置、智驾域控制器、遥控器、整车控制器、电子手刹、数据通讯部件、尾门角度传感器、油缸压力传感器、尾门开电磁阀、尾门关电磁阀和卸货装置控制电磁阀,智驾域控制器与无人卸货控制装置通讯交互连接,遥控器与无人卸货控制装置无线连接,整车控制器的车速端和取力器状态端连接无人卸货控制装置,无人卸货控制装置的开取力指令端连接整车控制器,电子手刹、尾门角度传感器和油缸压力传感器分别与无人卸货控制装置通讯连接,无人卸货控制装置的尾门开端连接尾门开电磁阀,无人卸货控制装置的尾门关端连接尾门关电磁阀,无人卸货控制装置的传输带控制端连接卸货装置电磁阀,无人卸货控制装置的故障反馈端连接数据通讯部件。
3、本发明还提供一种用于无人驾驶车辆的自动卸货控制装置的控制方法,包括无人卸货控制方案和人工卸货控制方案;
4、无人卸货控制方案:
5、步骤s1、车辆到达卸货点后无人驾驶域控发送“车辆到达卸货点信号”;
6、步骤s2、上装控制器判断车速是否为零及电子手刹状态是否为“手刹拉起”,如果是进入步骤s3,如果不是返回步骤s1;
7、步骤s3、上装控制器请求整车控制器打开取力电磁阀,同时判断取力器状态;如果取力器打开进入步骤s4;如果取力器未打开重新向整车控制器发送开启请求信号,如预设时间内取力器未打开或收到取力器故障信息停止发送;
8、步骤s4、上装控制器控制“电动尾门开启电磁阀”打开,并根据“尾门角度传感器”信号判断电动尾门是否开启到最大位置同时记录油缸压力状态;如果判断到尾门开启最大位置后进入步骤s5,如尾门在预设时间内未开启或无法开启到最大位置报告“电动尾门无法正常开启故障”;
9、步骤s5、上装控制器控制“卸货装置电磁阀”打开,并根据油缸压力判断卸货装置是否工作;如卸货装置工作进入步骤s6,如果卸货装置在预设时间内未打开上报“卸货装置无法开启故障”;
10、步骤s6、卸货装置工作待标定时间后,上装控制器发送“请求车辆卸货前行”报文至无人驾驶域控,无人驾驶域控收到报文信号后以预设车速行驶,行驶至标定距离后车辆停止并发送“车辆停止卸货行驶”指令至上装控制器,流程进入步骤s7;
11、步骤s7、待标定时间后,上装控制器控制“卸货装置电磁阀”关闭并根据油缸压力判断卸货装置是否关闭,如是进入步骤s8,如预设时间内未关闭报告“卸货装置无法关闭故障”;
12、步骤s8、上装控制器控制“电动尾门开启电磁阀”关闭&控制“电动尾门关闭电磁阀”打开,并根据“尾门角度传感器”判断尾门是否关闭;如是进入步骤s9,如预设时间内未关闭报告“电动尾门无法关闭故障”;
13、步骤s9、上装控制器请求整车控制器关闭取力电磁阀,同时判断取力器状态;如果取力器关闭进入步骤s10;如果取力器未关闭重新向整车控制器发送关闭请求信号,如预设时间取力器未关闭或收到取力器故障信息停止发送;
14、步骤s10、上装控制器向无人驾驶域控发送“完成卸货”报文;
15、人工卸货控制方案:
16、步骤1、上装控制器接收到“电动尾门开启信号”或“遥控开启电动尾门信号”后,打开电动尾门;
17、步骤2、上装控制器接收到“卸货装置开启信号”或“遥控开启卸货装置信号”后,打开卸货装置;
18、步骤3、上装控制器接收到“卸货装置关闭信号”或“遥控关闭卸货装置信号”后,关闭卸货装置;
19、步骤4、上装控制器接收到“电动尾门关闭信号”或“遥控关闭电动尾门信号”后,关闭电动尾门。
20、进一步的,无人卸货控制方案和人工卸货控制方案转换时:
21、车辆执行无人卸货流程中持续判断是否有人工卸货指令介入;
22、如人工卸货流程未介入继续执行无人卸货流程直至流程结束;如人工卸货流程介入则立即退出无人卸货流程响应人工卸货指令。
23、本发明的优点在于,
24、1. 本发明装置与无人驾驶域控互相配合,真正实现的无人化运营。
25、2. 通过角度传感器及检测油缸压力可实现对尾门及卸货装置状态监控,能够降低人工判断失误导致的风险。
技术特征:
1.一种用于无人驾驶车辆的自动卸货控制装置,其特征在于,包括无人卸货控制装置、智驾域控制器、遥控器、整车控制器、电子手刹、数据通讯部件、尾门角度传感器、油缸压力传感器、尾门开电磁阀、尾门关电磁阀和卸货装置控制电磁阀,所述智驾域控制器与所述无人卸货控制装置通讯交互连接,遥控器与所述无人卸货控制装置无线连接,所述整车控制器的车速端和取力器状态端连接所述无人卸货控制装置,所述无人卸货控制装置的开取力指令端连接所述整车控制器,所述电子手刹、所述尾门角度传感器和所述油缸压力传感器分别与所述无人卸货控制装置通讯连接,所述无人卸货控制装置的尾门开端连接尾门开电磁阀,所述无人卸货控制装置的尾门关端连接尾门关电磁阀,所述无人卸货控制装置的传输带控制端连接卸货装置电磁阀,所述无人卸货控制装置的故障反馈端连接所述数据通讯部件。
2.一种用于无人驾驶车辆的自动卸货控制装置的控制方法,其特征在于,包括无人卸货控制方案和人工卸货控制方案;
3.根据权利要求2所述的一种用于无人驾驶车辆的自动卸货控制装置的控制方法,其特征在于,无人卸货控制方案和人工卸货控制方案转换时:
技术总结
一种用于无人驾驶车辆的自动卸货控制装置及控制方法,无人卸货控制装置控制电动尾门开/闭;控制卸货装置启动和关闭;车辆开始无人卸货前不仅接收智驾域控制器发送的“到达卸货区停车”信号外,还判断车速、电子手刹状态以确保车辆在安全环境下卸货;车辆具备卸货条件后发送指令要求整车控制器打开取力电磁阀为上装液压油缸提供动力。无人卸货控制装置实时监控电磁阀状态,电磁阀打开后打开电动尾门并实时监控尾门是否开启到标定角度,尾门开启成功后打开卸货装置电磁阀进行卸货,并通过检测油缸压力判断卸货装置是否打开;车辆完成卸货后依次关闭卸货装置、电动尾门,要求整车控制器关闭取力电磁阀;执行完成后可请求车辆继续执行运输任务。
技术研发人员:侯志文,毛向阳,庄振京
受保护的技术使用者:上海友道智途科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!