一种四驱车辆的控制方法、装置及四驱车辆与流程
1.本技术涉及车辆技术领域,尤其涉及一种四驱车辆的控制方法、装置及四驱车辆。
背景技术:
2.随着纯电动汽车技术日益成熟,人们对于纯电动汽车的性能,如对动力性能、操纵稳定性能等方面的要求也日益提升。
3.纯电动四驱汽车,因为其良好的动力性能和操纵性能等,在市场上逐渐受到用户的推崇。目前,纯电动汽车中普遍采用前后桥双电机方式实现纯电动四驱控制。
4.然而,现有的前后桥双电机扭矩分配方法难以适应复杂的路况。
技术实现要素:
5.本技术的实施例提供一种四驱车辆的控制方法、装置及四驱车辆,可以解决四驱车辆在复杂路况下的驱动力下降的问题。
6.本技术的实施例采用如下技术方案:
7.第一方面,提供了一种四驱车辆的控制方法,该方法包括:
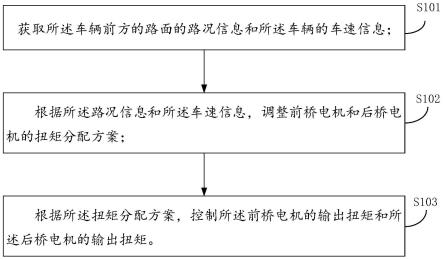
8.获取所述车辆前方的路面的路况信息和所述车辆的车速信息;
9.根据所述路况信息和所述车速信息,调整前桥电机和后桥电机的输出扭矩分配方案;
10.根据所述扭矩分配方案,控制所述前桥电机的输出扭矩和所述后桥电机的输出扭矩。
11.可选的,所述获取所述车辆前方的路面的路况信息的步骤,包括:
12.在所述路况信息包括凹坑的情况下,获取所述车辆到所述凹坑之间的第一距离值和所述凹坑的宽度。
13.可选的,所述根据所述路况信息和所述车速信息,调整前桥电机和后桥电机的输出扭矩分配方案的步骤,包括:
14.当所述第一距离值小于预设距离值时,增加所述后桥电机的输出扭矩;所述预设距离值根据所述车速信息确定;
15.当所述车辆的前轮通过所述凹坑,并且所述车辆的后轮未通过所述凹坑时,增加所述前桥电机的输出扭矩。
16.可选的,所述根据所述路况信息和所述车速信息,调整前桥电机和后桥电机的输出扭矩分配方案的步骤,包括:
17.当所述凹坑的宽度小于预设宽度时,保持所述车辆当前状态下的所述前桥电机和所述后桥电机的所述扭矩分配方案;所述预设宽度根据所述车辆的车轮直径确定。
18.可选的,所述获取所述车辆前方的路面的路况信息的步骤,包括:
19.获取所述车辆前方第二距离值内的所述路面的坡度值;所述第二距离值根据所述车速信息确定。
20.可选的,所述根据所述路况信息和所述车速信息,调整前桥电机和后桥电机的输出扭矩分配方案的步骤,包括:
21.在所述坡度值大于第一预设坡度值的情况下,增加所述后桥电机的输出扭矩;
22.在所述坡度值小于第二预设坡度值的情况下,增加所述前桥电机的输出扭矩。
23.可选的,所述根据所述路况信息和所述车速信息,调整前桥电机和后桥电机的输出扭矩分配方案的步骤,还包括:
24.在增加所述后桥电机的输出扭矩的情况下,减少所述前桥电机的输出扭矩;
25.或者,
26.在增加所述前桥电机的输出扭矩的情况下,减少所述后桥电机的输出扭矩。
27.可选的,在所述获取所述车辆前方的路面的路况信息和所述车辆的车速信息的步骤之前,所述方法还包括:
28.获取所述车辆的所述前桥电机和所述后桥电机的受限状态;
29.在所述前桥电机处于所述受限状态的情况下,增加所述后桥电机的输出扭矩;
30.在所述后桥电机处于所述受限状态的情况下,增加所述前桥电机的输出扭矩;
31.其中,所述受限状态包括电机处于制动防抱死系统功能激活的状态或者电机异常的状态。
32.第二方面,提供了一种四驱车辆的控制装置,包括:
33.信息获取模块:用于获取所述车辆前方的路面的路况信息和所述车辆的车速信息;
34.扭矩分配模块:用于根据所述路况信息和所述车速信息,调整前桥电机和后桥电机的输出扭矩分配方案;
35.电机控制模块:用于根据所述扭矩分配方案,控制所述前桥电机的输出扭矩和所述后桥电机的输出扭矩。
36.第三方面,提供了一种四驱车辆,所述四驱车辆包括四驱车辆的控制装置,所述四驱车辆的控制装置包括处理器、存储器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现第一方面任一所述的四驱车辆的控制方法。
37.相对于现有技术,本技术所述的四驱车辆的控制方法具有以下优势:
38.本技术所述四驱车辆的控制方法,通过获取所述车辆前方的路面的路况信息和所述车辆的车速信息;根据所述路况信息和所述车速信息,调整前桥电机和后桥电机的输出扭矩分配方案;根据所述扭矩分配方案,控制所述前桥电机的输出扭矩和所述后桥电机的输出扭矩。这样,针对不同的路况,可以针对性的调整前桥电机和后桥电机的输出扭矩,减少车辆因路况改变导致的行驶性能降低的问题,进而提升了用户驾驶体验。
附图说明
39.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
40.图1为本技术实施例提供的一种四驱车辆的控制方法的流程图;
41.图2为本技术实施例提供的一种路面存在凹坑的情况下四驱车辆的控制方法的流程图;
42.图3为本技术实施例提供的一种路面存在坡度的情况下四驱车辆的控制方法的流程图;
43.图4为本技术实施例提供的一种电机受限的情况下四驱车辆的控制方法的流程图;
44.图5为本技术实施例提供的一种四驱车辆的控制装置的结构示意图;
45.图6为本技术实施例提供的一种四驱车辆的结构示意图。
具体实施方式
46.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
47.在本技术的实施例中,采用“第一”、“第二”等字样对功能和作用基本相同的相同项或相似项进行区分,仅为了清楚描述本技术实施例的技术方案,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。
48.本技术实施例中,四驱车辆可以是电动四驱汽车。四驱车辆包括前桥电机和后桥电机,前桥电机直接驱动前轮,后桥电机直接驱动后轮,前桥电机和后桥电机共同为车辆提供驱动力。
49.现有技术中,会根据车速信息获取前桥电机和后桥电机的扭矩分配方案,但是在部分复杂路况下,前轮或后轮的附着力会降低甚至消失,此时车辆前桥电机或后桥电机提供的驱动力会降低甚至消失,车辆整体的驱动力降低,会导致车辆出现打滑甚至被困住。
50.本技术实施例提供了一种四驱车辆的控制方法,参照图1,包括:
51.s101、获取车辆前方的路面的路况信息和车辆的车速信息。
52.路况信息包括影响车轮附着力的信息,在电机扭矩不变的情况下,车轮的附着力越低,电机提供的驱动力越小;车轮的附着力越高,电机提供的驱动力越大。具体的,路况信息可以是凹坑信息或者坡度值。
53.例如,路面为上坡时,车辆的前轮附着力下降,进而前桥电机提供的驱动力下降;路面为下坡时,车辆的后轮附着力下降,进而后桥电机提供的驱动力下降;路面存在凹坑时,位于凹坑内的车轮可能会悬空失去附着力,进而位于凹坑内的车轮不能提供驱动力。
54.本技术实施例提供的四驱车辆的控制方法可以应用于整车控制器(vehicle control unit,vcu),电动车辆的整车控制器能够控制前桥电机和后桥电机的输出扭矩。
55.vcu可以是通过高级驾驶辅助系统(advanced driving assistance system,adas)获取路况信息。adas利用安装在车辆上的各式各样的传感器(例如,毫米波雷达、激光雷达、单\双目摄像头以及卫星导航),在车辆行驶过程中感应周围的环境,收集路况数据。adas可以实现静态、动态物体的辨识、侦测与追踪。通过adas可以识别路面凹坑或者收集路面的坡度值,具体的,通过adas可以获取路面凹坑与车辆的距离以及路面凹坑的大小。
56.vcu可以直接获得车辆的车速信息,并且获取车辆的车速信息是实时的,因为车辆的车速信息可以是变化的,例如,在路面存在凹坑时,用户发现凹坑后可能会进行减速。
57.另外,获取路况信息的范围根据车辆的车速信息确定,一般情况下,车辆根据路况信息调整前桥电机和后桥电机的输出扭矩需要一段时间,因此车辆的车速越快,沿车辆行驶方向上,车辆前方需要获取的路况信息的路面长度越长,以便于vcu及时根据远处的路面信息调整扭矩分配方案;车辆的车速越慢,沿车辆行驶方向上,车辆前方需要获取的路况信息的路面长度越短,vcu不需要同时处理过多的数据。
58.s102、根据路况信息和车速信息,调整前桥电机和后桥电机的输出扭矩分配方案。
59.具体的,步骤s102、根据路况信息和车速信息,调整前桥电机和后桥电机的输出扭矩分配方案,包括以下子步骤:
60.子步骤1,根据车辆的车速信息,获取车辆当前状态下的前桥电机和后桥电机的扭矩分配方案。
61.根据车辆的车速信息,可以根据前桥电机和后桥电机的综合效率进行扭矩分配,具体的输出扭矩分配方案根据车辆实际设置。
62.本技术实施例中,车辆当前状态下分配到前桥电极的输出扭矩为第一扭矩值,分配到后桥电极的输出扭矩为第二扭矩值。
63.子步骤2,根据路况信息,调整前桥电机和后桥电机的输出扭矩分配方案。
64.根据路况信息,可以判断车辆的前轮或后轮的附着力变化,进而可以根据附着力变化调整前桥电机和后桥电机的输出扭矩分配方案。
65.示例的,路面为上坡时,车辆的前轮附着力下降,进而前桥电机提供的驱动力下降,可以分配更多的扭矩值至后桥电机,即增大第二扭矩值;路面为下坡时,车辆的后轮附着力下降,进而后桥电机提供的驱动力下降,可以增大后桥电机的扭矩值,即增大第一扭矩值;路面存在凹坑时,首先车辆的前轮进入凹坑,前轮悬空失去附着力,前桥电机提供的驱动力下降至0,需要增大后桥电机的扭矩值,即增大第二扭矩值;然后车辆的后轮进入凹坑,后轮悬空失去附着力,后桥电机提供的驱动力下降至0,需要增大前桥电机的扭转,即增大第一扭矩值。
66.需要说明的是,在第二扭矩值增大时,可以对应的减少第一扭矩值;或者在第一扭矩值增大时,可以对应的减少第二扭矩值,保证车辆的总驱动力不变,提高用户的驾驶体验。
67.s103、根据扭矩分配方案,控制前桥电机的输出扭矩和后桥电机的输出扭矩。
68.扭矩分配方案中包括分配给前桥电机的第一扭矩值和分配给后桥电机的第二扭矩值。
69.根据第一扭矩值控制前桥电机的输出扭矩,根据第二扭矩值控制后桥电机的输出扭矩。
70.示例的,路面为上坡时,扭矩分配方案中的第二扭矩值增大,增大后桥电机的扭矩值;路面为下坡时,扭矩分配方案中第一扭矩值增大,增大前桥电机的扭矩值;路面存在凹坑时,首先车辆的前轮进入凹坑,扭矩分配方案中第二扭矩值增大,增大后桥电机的扭矩值;然后车辆的后轮进入凹坑,扭矩分配方案中第一扭矩值增大,增大前桥电机的扭矩值。
71.本技术实施例提供的四驱车辆的控制方法,通过步骤s101获取车辆前方的路面的
路况信息和车辆的车速信息;步骤s102根据路况信息和车速信息,调整前桥电机和后桥电机的输出扭矩分配方案;步骤s103根据扭矩分配方案,控制前桥电机的输出扭矩和后桥电机的输出扭矩。针对不同的路况,可以针对性的调整前桥电机和后桥电机的输出扭矩,减少车辆因路况改变导致的行驶性能降低的问题,进而提升了用户驾驶体验。
72.本技术实施例提供了一种路面存在凹坑的情况下四驱车辆的控制方法,参照图2,该方法包括:
73.s201、在路况信息包括凹坑的情况下,获取车辆到凹坑之间的第一距离值和凹坑的宽度。
74.adas系统可以识别路面上的凹坑,并且可以较为准确的计算出车辆到凹坑之间的第一距离值和凹坑的宽度。
75.根据第一距离值和车辆车速,vcu可以计算车辆到达凹坑的时间,结合凹坑的宽度、车辆本身的轮距和轮间距,可以准确计算出车辆的前轮或后轮进入与离开凹坑的时间。具体的,可以划分为三个阶段,第一阶段,车辆的前轮未经过凹坑;第二阶段,车辆的前轮经过凹坑,车辆的后轮未经过凹坑;第三阶段,车辆的后轮经过凹坑。
76.根据凹坑的宽度,可以判断凹坑对车轮附着力的影响,具体的,当凹坑的宽度大于车轮直径时,当车辆通过时,一个车轮基本完全悬空,此车轮会完全失去附着力;当凹坑的宽度小于车轮直径时,车轮会部分悬空,车轮会失去部分附着力,并且凹坑的宽度越大,失去的附着力会越多,对车辆的总驱动力影响越大。
77.在路面信息包括凹坑的情况下,通过获取车辆到凹坑之间的第一距离值和凹坑的宽度,可以准确的获取凹坑的信息,以便于后续根据凹坑的信息调整前桥电机和后桥电机的扭矩输出方案。
78.另外,vcu可以直接获得车辆的车速信息,并且获取车辆的车速信息是实时的,因为车辆的车速信息可以是变化的,例如,在路面存在凹坑时,用户发现凹坑后可能会进行减速。
79.s202、当第一距离值小于预设距离值时,增加后桥电机的输出扭矩;预设距离值根据车速信息确定。
80.预设距离值根据车速信息和车辆调整扭矩的反应时间确定,根据车辆调整扭矩的反应时间获取预设时间,根据车速在预设时间的积分获取预设距离值。车速越高,对应的预设距离值越长;车速越低,对应的预设距离值可以越短。
81.车辆到凹坑之间的第一距离值小于预设距离值时,增加后桥电机的输出扭矩,具体的,根据凹坑的宽度决定后桥电机增加的输出扭矩,一般情况下,凹坑的宽度越大,车轮附着力降低越多,后桥电机的输出扭矩的增加值越大;凹坑的宽度越小,车轮附着力降低越少,后桥电机的输出扭矩的增加值越小。示例的,当凹坑的宽度大于车轮直径时,后桥电机的输出扭矩的增加值等于当前状态下前桥电机的输出扭矩值,车辆改变为后桥电机驱动;当凹坑的宽度小于车轮直径时,后桥电机的输出扭矩的增加值可以等于当前状态下前桥电机的输出扭矩值,或者,后桥电机的输出扭矩的增加值可以小于当前状态下前桥电机的输出扭矩值,具体根据车辆实际情况确定。
82.s203、当车辆的前轮通过凹坑,并且车辆的后轮未通过凹坑时,增加前桥电机的输出扭矩。
83.根据第一距离值和车速信息可以计算出车辆的前轮通过凹坑的时间,车辆的前轮通过凹坑后后轮即将进入凹坑,此时,增加前桥电机的输出扭矩,具体的,根据凹坑的宽度决定前桥电机增加的输出扭矩,一般情况下,凹坑的宽度越大,前桥电机的输出扭矩的增加值越大;凹坑的宽度越小,车轮附着力降低越少,前桥电机的输出扭矩的增加值越小。示例的,当凹坑的宽度大于车轮直径时,前桥电机的输出扭矩的增加值等于当前状态下后桥电机的输出扭矩值,车辆改变为前桥电机驱动;当凹坑的宽度小于车轮直径时,前桥电机的输出扭矩的增加值可以等于当前状态下后桥电机的输出扭矩值,或者,前桥电机的输出扭矩的增加值可以小于当前状态下后桥电机的输出扭矩值,具体根据车辆实际情况确定。
84.需要说明的是,根据车辆前轮和后轮之间的轮间距和车速信息可以计算出车辆的后轮通过凹坑的时间,此时车辆已经通过凹坑,不需要根据凹坑调整扭矩分配方案。
85.此时,在没有其他路况信息的情况下,前桥电极和后桥电极均维持路面没有凹坑时的扭矩值,或者,在路况信息还包括坡度值的情况下,根据坡度值调整扭矩分配方案。
86.本技术实施例中,通过步骤s201、在路面包括凹坑的情况下,获取车辆到凹坑之间的第一距离值和凹坑的宽度;步骤s202、当第一距离值小于预设距离值时,增加后桥电机的输出扭矩;预设距离值根据车速信息确定;步骤s203、当车辆的前轮通过凹坑,并且车辆的后轮未通过凹坑时,增加前桥电机的输出扭矩;这样,实现了车辆在通过凹坑时总驱动力不下降的情况下,还能够避免车轮陷入凹坑;并且不需要用户手动操作对凹坑进行反应,实现了驾驶的智能化。
87.可选的,步骤s102、根据路况信息和车速信息,调整前桥电机和后桥电机的输出扭矩分配方案,还包括:
88.s204、当凹坑的宽度小于预设宽度时,保持车辆当前状态的前桥电机和后桥电机的扭矩分配方案;预设宽度根据车辆的车轮直径确定。
89.当凹坑的宽度小于车轮直径时,车轮会部分悬空,车轮会失去部分附着力,并且凹坑的宽度越小,失去的附着力会越少,对车辆的总驱动力影响越小,因此,当凹坑的宽度小于一定值时,没有必要为了微小的总驱动力变化调整前桥电机或后桥电机的输出扭矩,可以保持车辆当前状态下的前桥电机和后桥电机的扭矩分配方案。
90.其中,预设宽度根据车辆的车轮直径确定,车轮直径越大,预设宽度越大;车轮直径越小,预设宽度越小。预设宽度和车轮直径具体的关系根据实际车辆确定,本技术实施例对此不做限定。
91.本技术实施例中,通过步骤s204、当凹坑的宽度小于预设宽度时,保持车辆当前状态的前桥电机和后桥电机的扭矩分配方案;预设宽度根据车辆的车轮直径确定,避免车辆因凹坑的宽度小于预设宽度的凹坑频繁调整扭矩分配方案,进而减少频繁调整扭矩过程中的电机综合效率下降问题,降低了车辆能耗。
92.本技术实施例提供的一种路面存在坡度的情况下四驱车辆的控制方法,参照图3,包括:
93.s301、获取车辆前方第二距离值内的路面的坡度值;第二距离值根据车速信息确定。
94.其中,坡度值可以是正值,表示上坡,或者,坡度值可以是负值,表示下坡。
95.第二距离值根据车辆的车速信息确定,一般情况下,车辆根据路况信息调整前桥
电机和后桥电机的输出扭矩需要一段时间,因此车辆的车速越快,沿车辆行驶方向上,车辆前方需要获取路况信息的路面长度越长,第二距离值越大;车辆的车速越慢,沿车辆行驶方向上,车辆前方需要获取路况信息的路面长度越短,第二距离值越小。
96.在路面存在坡度的情况下,通过获取车辆前方第二距离值内的路面的坡度值;第二距离值根据车速信息确定,可以准确的获取路面的坡度信息,以便于后续根据路面的坡度值调整前桥电机和后桥电机的扭矩输出方案。
97.另外,vcu可以直接获得车辆的车速信息,并且获取车辆的车速信息是实时的,因为车辆的车速信息可以是变化的,例如,在坡度值较大时,用户发现后可能会进行减速。
98.s302、在坡度值大于第一预设坡度值的情况下,增加后桥电机的输出扭矩。
99.第一预设坡度值为上坡的坡度临界值,第二预设坡度值是正值,在坡度值大于第一预设坡度值的情况下,车辆前轮的附着力降低的较多,影响车辆的总驱动力,通过增加后桥电机的输出扭矩弥补车辆的总驱动力。
100.第一预设坡度值具体根据车辆的实际需求设置,示例的,第一预设坡度值可以是5
°
,当坡度值大于5
°
时,增加后桥电机的输出扭矩;当坡度值为0~5
°
时,不增加后桥电机的输出扭矩。或者,第一预设坡度值也可以是其他数值,本技术实施例对此不做具体限定。
101.根据坡度值决定后桥电机增加的输出扭矩,在坡度值大于第一预设坡度值的情况下,坡度值越大,车辆前轮的附着力降低的越多,需要增加的后桥电机的输出扭矩越大;坡度值越小,车辆前轮的附着力降低的越少,需要增加的后桥电机的输出扭矩越小。
102.s303、在坡度值小于第二预设坡度值的情况下,增加前桥电机的输出扭矩。
103.第二预设坡度值为下坡的坡度临界值,第二预设坡度值是负值,在坡度值小于第二预设坡度值的情况下,车辆后轮的附着力降低的较多,影响车辆的总驱动力,通过增加前桥电机的输出扭矩弥补车辆的总驱动力。
104.第二预设坡度值具体根据车辆的实际需求设置,示例的,第二预设坡度值可以是-5
°
,当坡度值小于-5
°
时,增加前桥电机的输出扭矩;当坡度值为-5
°
~0时,不增加后桥电机的输出扭矩。或者,第二预设坡度值也可以是其他数值,本技术实施例对此不做具体限定。
105.根据坡度值决定前桥电机增加的输出扭矩,在坡度值小于第二预设坡度值的情况下,坡度值越小,车辆后轮的附着力降低的越多,需要增加的前桥电机的输出扭矩越大;坡度值越大,车辆后轮的附着力降低的越少,需要增加的后桥电机的输出扭矩越小。
106.需要说明的是,在坡度值小于或等于第一预设坡度值,并且坡度值大于或等于第二预设坡度值的情况下,保持车辆当前状态下的前桥电机和后桥电机的扭矩分配方案。
107.在坡度值小于或等于第一预设坡度值,并且坡度值大于或等于第二预设坡度值的情况下,车辆的前轮或后轮附着力降低的较小,车辆的总驱动力降低的较小,没有必要为了微小的总驱动力变化调整前桥电机或后桥电机的输出扭矩,减少频繁调整扭矩过程中的电机综合效率下降问题,降低了车辆能耗。
108.此时,在没有其他路况信息的情况下,前桥电极和后桥电极均维持当前状态下的扭矩值分配方案,或者,在路况信息还包括凹坑的情况下,根据凹坑调整扭矩分配方案。
109.本技术实施例中,通过步骤s301、获取车辆前方第二距离值内的路面的坡度值;第二距离值根据车速信息确定;步骤s302、在坡度值大于第一预设坡度值的情况下,增加后桥电机的输出扭矩;步骤s303、在坡度值小于第二预设坡度值的情况下,增加前桥电机的输出
扭矩;这样,实现了车辆在经过存在路面坡度的路面时总驱动力不下降的情况下,还能够避免车辆打滑等问题;并且不需要用户手动操作对路面坡度进行反应,实现了驾驶的智能化。
110.可选的、步骤s102、根据路况信息和车速信息,调整前桥电机和后桥电机的输出扭矩分配方案,包括:在增加后桥电机的输出扭矩的情况下,减少前桥电机的输出扭矩;或者,在增加前桥电机的输出扭矩的情况下,减少后桥电机的输出扭矩。
111.前轮附着力下降时,仅增加后桥电机的输出扭矩,总驱动力可能会超过原有驱动力或者前桥电机会空转,可以对应的减少前桥电机的输出扭矩,保证车辆的总驱动力不变;后轮附着力下降时,仅增加前桥电机的输出扭矩,总驱动力可能会超过原有驱动力或者后桥电机会空转,可以对应的减少后桥电机的输出扭矩,保证车辆的总驱动力不变。
112.本技术实施例中,步骤s102、根据路况信息和车速信息,调整前桥电机和后桥电机的输出扭矩分配方案,通过在增加后桥电机的输出扭矩的情况下,减少前桥电机的输出扭矩;或者,在增加前桥电机的输出扭矩的情况下,减少后桥电机的输出扭矩,能够保持车辆驱动力不变,提高用户的驾驶体验。
113.可选的,参照图4,步骤s101、在获取车辆前方的路面的路况信息和车辆的车速信息的之前,该方法还包括:
114.s401、获取车辆的前桥电机和后桥电机的受限状态。
115.受限状态可以包括前桥电机无法工作的状态,或者,受限状态可以包括后桥电机无法工作的状态。
116.具体的,车辆在制动防抱死系统(antilock brake system,abs)启动时,对应的电机无法工作,例如,前轴abs启动时,前桥电机的扭矩受限;后轴abs启动时,后桥电机的扭矩受限。或者,电机在温度过高或出现故障时,无法响应vcu的请求扭矩。
117.s402、在前桥电机处于受限状态的情况下,增加后桥电机的输出扭矩。
118.在车辆的前轴abs启动或者前桥电机在温度过高或出现故障时,前桥电机输出扭矩受限,可以增加后桥电机的输出扭矩,具体的增加值可以根据原前桥电机的输出扭矩确定,保证车辆的总驱动力稳定。
119.s403、在后桥电机处于受限状态的情况下,增加前桥电机的输出扭矩;其中,受限状态包括电机处于制动防抱死系统功能激活的状态或者电机异常的状态。
120.在车辆的后轴abs启动或者后桥电机在温度过高或出现故障时,后桥电机输出扭矩受限,可以增加前桥电机的输出扭矩,具体的增加值根据原后桥电机的输出扭矩确定,保证车辆的总驱动力稳定。
121.本技术实施例中,在步骤s101、获取车辆前方的路面的路况信息和车辆的车速信息之前,通过步骤s401、获取车辆的前桥电机和后桥电机的受限状态;步骤s402、在前桥电机处于受限状态的情况下,增加后桥电机的输出扭矩;步骤s403、在后桥电机处于受限状态的情况下,增加前桥电机的输出扭矩;其中,受限状态包括电机处于制动防抱死系统功能激活的状态或者电机异常的状态;实现在一个电机受限的情况下,增加另一个电机的输出扭矩,保证车辆的总驱动力稳定,进而保证了车辆行驶的安全性。
122.本发明实施例提供了一种四驱车辆的控制装置,参照图5,包括:
123.信息获取模块501:用于获取车辆前方的路面的路况信息和车辆的车速信息。
124.扭矩调整模块502:用于根据路况信息和车速信息,调整前桥电机和后桥电机的输
出扭矩分配方案。
125.电机控制模块503:用于根据扭矩分配方案,控制前桥电机的输出扭矩和后桥电机的输出扭矩。
126.本技术实施例提供的四驱车辆的控制装置,通过信息获取模块501获取获取车辆前方的路面的路况信息和车辆的车速信息;扭矩调整模块502根据路况信息和车速信息,调整前桥电机和后桥电机的输出扭矩分配方案;电机控制模块503根据扭矩分配方案,控制前桥电机的输出扭矩和后桥电机的输出扭矩。针对不同的路况,可以针对性的调整前桥电机和后桥电机的输出扭矩,减少车辆因路况改变导致的行驶性能降低的问题,进而提升了用户驾驶体验。
127.可选的,信息获取模块501包括:
128.凹坑信息获取子模块:用于在路况信息包括凹坑的情况下,获取车辆到凹坑之间的第一距离值和凹坑的宽度。
129.可选的,扭矩调整模块502包括:
130.后桥电机扭矩增加子模块:当第一距离值小于预设距离值时,增加后桥电机的输出扭矩;预设距离值根据车速信息确定;
131.前桥电机扭矩增加子模块:用于当车辆的前轮通过凹坑,并且车辆的后轮未通过凹坑时,增加前桥电机的输出扭矩。
132.可选的,扭矩调整模块502还包括:
133.凹坑宽度判断子模块:用于当凹坑的宽度小于预设宽度时,保持车辆当前状态下的前桥电机和后桥电机的扭矩分配方案;预设宽度根据车辆的车轮直径确定。
134.可选的,信息获取子模块501包括:
135.坡度值获取子模块:获取车辆前方第二距离值内的路面的坡度值;第二距离值根据车速信息确定。
136.车速信息获取子模块:用于获取车速信息。可选的,扭矩调整模块502包括:
137.后桥电机扭矩增加子模块:还用于在坡度值大于第一预设坡度值的情况下,增加后桥电机的输出扭矩。
138.前桥电机扭矩增加子模块:还用于在坡度值小于第二预设坡度值的情况下,增加前桥电机的输出扭矩。
139.可选的,扭矩调整模块502,还包括:
140.前桥电机扭矩减少子模块:用于在增加后桥电机的输出扭矩的情况下,减少前桥电机的输出扭矩;
141.后桥电机扭矩减少子模块:用于在增加前桥电机的输出扭矩的情况下,减少后桥电机的输出扭矩。
142.可选的,四驱车辆的控制装置还包括:
143.电机受限状态获取模块:用于获取车辆的前桥电机和后桥电机受限状态;
144.后桥电机扭矩增加子模块:还用于在前桥电机处于受限状态的情况下,增加后桥电机的输出扭矩;
145.前桥电机扭矩增加子模块:还用于在后桥电机处于受限状态的情况下,增加前桥电机的输出扭矩;
146.其中,受限状态包括电机处于制动防抱死系统功能激活的状态或者电机异常的状态。
147.参照图6,本技术实施例提供了一种四驱车辆,四驱车辆包括四驱车辆的控制装置601,四驱车辆的控制601包括处理器602、存储器603以及存储在存储器602上并可在处理器603上运行的计算机程序,其特征在于,处理器602执行程序的情况下实现上述任一的四驱车辆的控制方法实施例的各个过程,且能达到相同的技术效果。
148.本技术实施例提供的四驱车辆,通过存储在存储器602上并可在处理器603上运行的计算机程序实现,获取车辆前方的路面的路况信息和车辆的车速信息;根据路况信息和车速信息,调整前桥电机和后桥电机的输出扭矩分配方案;根据扭矩分配方案,控制前桥电机的输出扭矩和后桥电机的输出扭矩。针对不同的路况,可以针对性的调整前桥电机和后桥电机的输出扭矩,减少车辆因路况改变导致的行驶性能降低的问题,进而提升了用户驾驶体验。
149.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1