一种用于履带机器人的行驶装置及行驶方法
本发明属于机器人,具体涉及一种用于履带机器人的行驶装置及行驶方法。
背景技术:
1、随着科技的发展,移动机器人在各个领域得到广泛的应用,履带机器人因其具有结构紧凑、越障能力好、地形适应能力强等优点而被广泛关注。但履带机器人的越障性能会受自身体积影响,当履带机器人机体较小时,其越障性能就会大大减弱,导致需要在越障性能要求较高的环境中使用时,机器人机体必须足够大,这不仅增加了制造成本,且因为机体较大使得机器人更加笨重,降低了使用的便捷性。甚至在某些需要机器人拥有较高的越障性能的同时要求小机体的使用场景,例如在井下灾后钻孔救援现场,大型机器人无法通过钻孔,小型机器人又因越障性能无法完成探测救援任务,现存的传统履带机器人大多无法使用。因此亟待研究一种履带机器人行驶装置,在保证机器人体积小巧的同时亦具有较高的越障性能,且易于控制,以满足使用需求。
技术实现思路
1、为解决现有技术中存在的上述缺陷,本发明的目的在于提供一种可实现机器人平稳转向、横向移动和进行翻转、增加机器人的越障性能的履带机器人行驶装置及行驶方法,该装置设计新颖、结构紧凑合理、使用操作便捷、实用性强。
2、本发明是通过下述技术方案来实现的。
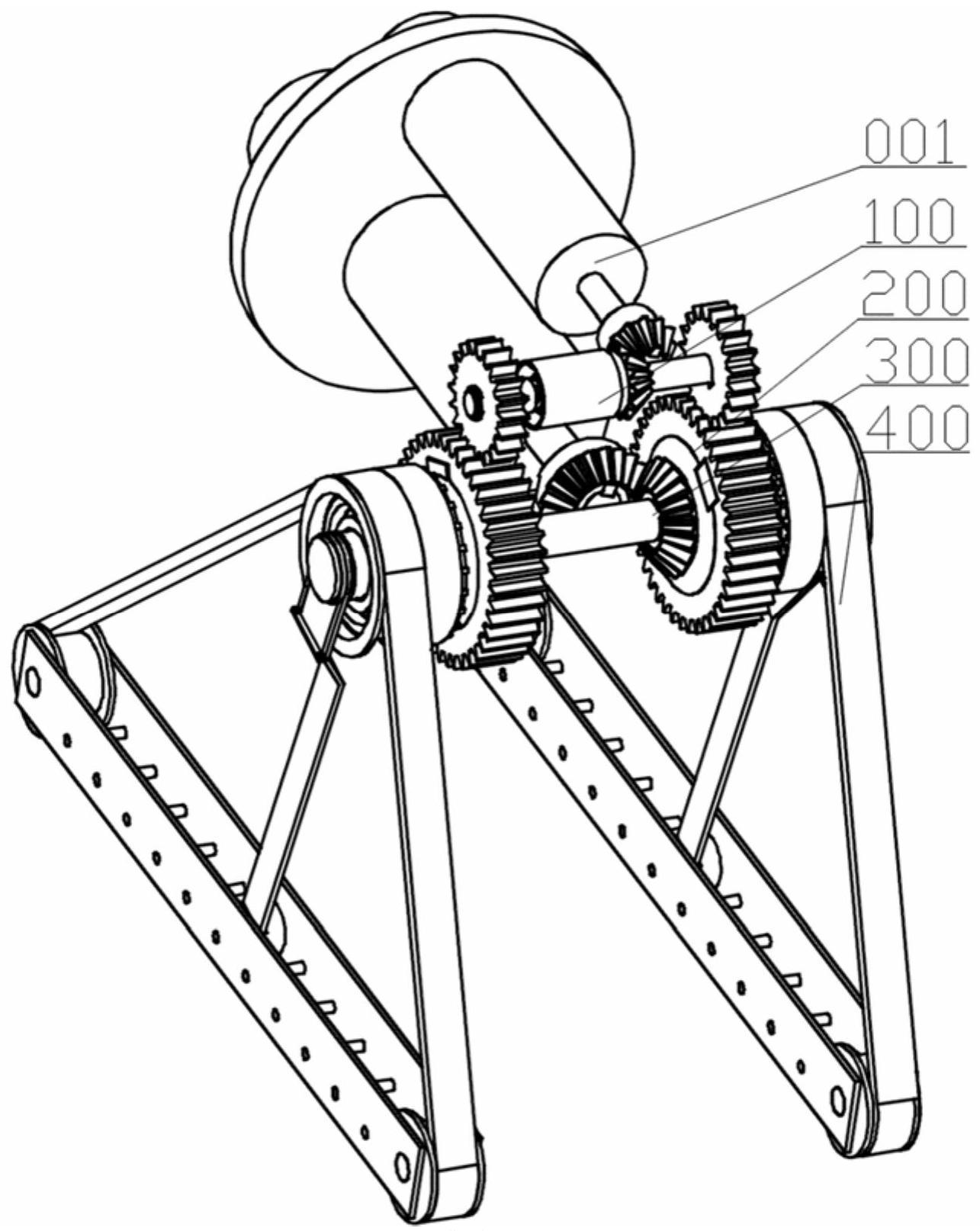
3、一种用于履带机器人的行驶装置,包括:
4、行驶差速机构,配置有相互啮合的第一主从锥齿轮、差速器和输出齿轮,行驶驱动电机驱动第一主从动锥齿轮转动,带动差速器和成对输出齿轮转动,带动行驶传动机构的输入齿轮转动;
5、行驶传动机构,配置有带动输入齿轮与其同轴转动的外轴和输出轴,输出轴带动可变式履带机构的驱动轮上的驱动履带转动,使履带机器人正常行驶;
6、翻转机构,配置有翻转驱动电机、相互啮合的第二主从动锥齿轮、内轴和锁止器,翻转驱动电机驱动第二主从动锥齿轮转动,带动内轴同轴转动,通过内轴带动锁止器与可变式履带机构的锁止轮轴向移动并实现相互锁止,限制履带机构轴向移动的距离,实现履带机器人翻越障碍物;
7、可变式履带机构,配置有履带、驱动轮、履带杆、锁止轮和履带架,驱动轮与输出轴同步转动,驱动履带转动,通过锁止轮与锁止器在内轴上的轴向移动以及相互锁止、放开,配合内轴实现可变式履带机构轴向移动和履带机器人翻越障碍物;
8、通过配合行驶电机和翻转驱动电机工作状态的转换,实现履带机器人的正常行驶、翻越障碍物和过高障碍物翻越三种不同的运动方式;通过履带杆和履带架之间的角度变化来改变履带机构的构态,实现履带的收叠。
9、优选的,行驶差速机构包括第一主动锥齿轮、第一从动锥齿轮、半轴齿轮、行星齿轮、半轴、输出齿轮和差速器,行驶驱动电机上第一主动锥齿轮啮合差速器上的第一从动锥齿轮,半轴齿轮安装在半轴上,与安装在差速器上的行星齿轮啮合;安装在半轴末端的输出齿轮与输入齿轮啮合。
10、优选的,行星齿轮通过沿差速器壳体内壁径向分布一对固定轴固定。
11、优选的,所述行驶传动机构包括输入齿轮、外轴、轴套和输出轴,输入齿轮连接在外轴一侧;轴套安装在外轴另一侧,轴套上连接输出轴;输出轴与驱动轮紧固。
12、优选的,翻转机构包括翻转驱动电机、第二主动锥齿轮、第二从动锥齿轮、内轴、滚珠轴承和锁止器;翻转驱动电机上的第二主动锥齿轮与内轴上的第二从动锥齿轮啮合;第二从动锥齿轮连接内轴,滚珠轴承安装在内轴上;内轴两侧分别与可变式履带机构锁止轮连接;内轴外侧连接锁止器。
13、优选的,可变式履带机构包括履带、驱动轮、履带杆、锁止轮、支撑轮和履带架;一对支撑轮固定在履带架上,履带架上连接履带杆,履带杆通过连杆盖锁止在锁止轮上,锁止轮通过滚珠轴承连接在驱动轮上,驱动轮固定在输出轴上;履带连接在一对支撑轮和驱动轮构成的行驶轮上。
14、优选的,所述锁止轮外安装滚珠轴承,锁止轮的轮内端面上均布锁止孔,锁止轮连接在内轴上。
15、优选的,所述锁止器包括一个沿圆盘均布凸台的壳体和一个连接圆盘的螺纹杆,凸台穿过锁止轮上的锁止孔,配合履带杆上的锁止槽锁住履带杆。
16、本发明进一步提供了一种所述装置的用于履带机器人的行驶方法,包括:
17、正常行驶状态下,行驶电机输出扭矩,驱动行驶差速机构的输出齿轮转动,带动行驶传动机构的输入齿轮转动;输入齿轮与外轴同轴转动,外轴传动输出轴转动,带动驱动轮同轴转动,驱动履带转动;
18、翻越较高障碍物时,翻转驱动电机输出扭矩,驱动锥齿轮带动内轴同轴转动,内轴与外轴运动互不干涉;内轴驱动锁止轮转动,带动可变式履带机构轴向向机体外侧移动,避免机体干涉履带翻转;锁止器轴向向机体内侧移动,与可变式履带机构上的锁止轮锁住履带杆;
19、翻转驱动电机驱动内轴带动可变式履带机构翻转,驱动机器人翻过障碍物;越障成功后翻转驱动电机继续驱动可变式履带机构旋转一周重新撑起机器人;
20、之后翻转驱动电机反转,锁止轮带动可变式履带机构横向向内侧移动,同时锁止器向外侧移动并松开履带杆,回到初始位置;
21、机器人翻越障碍时障碍物过高,动力不足机器人无法翻过障碍物时,行驶电机工作,驱动履带转动,辅助机器人翻过障碍物。
22、优选的,正常行驶状态下,翻转机构不工作;
23、翻越较高障碍物时,翻转驱动电机转动,此阶段行驶电机不工作,履带不转动;
24、在通过小口径通道时,可变式履带机构收叠,翻转驱动电机反转,带动收叠的可变式履带机构轴向向机体内侧移动直至到达预定位置,以便履带机器人穿过通道。
25、本发明由于采取以上技术方案,其具有以下有益效果:
26、1、本发明通过内外轴的配合工作,占用空间小,结构紧凑,可以在同一行驶装置实现三种不同的运动方式,并能够完成自锁的功能,相比现有的各类行驶装置仅有一种运动方式,拥有更强的运动性能。
27、2、本发明行驶装置设有行驶差速机构,仅使用一个行驶驱动电机即可实现机器人平稳转向。
28、3、本发明使用操作便捷,仅靠一个翻转电机实现可变式履带机构横向移动和驱动可变式履带机构进行翻转两种功能,使整个驱动装置结构简单,且容易实现各部件运动的协调。同时大幅度提高工作效率。
29、4、本发明的可变式履带机构可在内轴螺纹的带动下横向移动,通过小口径通道时,可将可变式履带机构收叠收回机体内部,因此可根据钻孔口径,最大化车体横截面积。
30、5、本发明采用的行驶传动机构和翻转机构使用时可靠性强,结构简单,所占用的空间小,结构更为紧凑,部分零件更换或维修更为方便,成本更加低廉,主要传动部件可批量生产。
31、6、本发明具有更广的适用范围和应用场景,可根据不同的应用条件对其余部件进行优化,以便完成具体工作。
32、本发明通过内外轴的配合,形成一个可实现三种运动方式的履带机器人行驶装置,且三种运动方式互不干涉。
33、本发明设计新颖,结构合理,布局紧凑,使用灵活可靠,在保证机器人体积小巧的情况下,大大增加机器人的越障性能,与一般行驶装置相比,运动性能更好,环境适应能力更强,可应用于复杂行驶环境中如煤矿井下、航天设备中,具有宽广的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!